基于FMRLC的四旋翼无人机姿态控制研究
2017-04-26 13:59丁承君何乃晨
科技创新与应用 2017年10期
丁承君+++何乃晨
摘 要:随着技术的发展,如今四旋翼无人机飞控系统中的姿态控制模块已经摒弃了最初使用的传统PID控制方式,大多数采用模糊PID控制方式,其核心是模糊规则和隶属函数的制定。但是由于上述两者一般通过技术人员的经验来确定,所以并不能完全保证其正确性和精确性,为了弥补这个不足,文章提出了基于模糊模型参考学习控制(FMRLC)的模糊自适应PID控制方式,使得飞控系统在运行的过程中根据无人机实际飞行效果来发现原有规则和隶属函数的不足,并对其作出实时修正,使系统性能得到不断改善,进一步优化控制效果,增强四旋翼无人机的悬停以及飞行稳定性。
关键词:四旋翼无人机;模糊自适应PID;模糊模型参考学习控制;飞行测试
1 概述
四旋翼无人机的姿态控制方法有多种,但最常用的当属PID控制。经典PID虽然最为简单实用,但由于PID参数固定需手动调节的问题,对于外部环境和数学模型多变的无人机来说需要频繁的参数整定,既繁琐又耗时。针对这个缺陷,近年来出现了基于模糊PID控制的姿态解算方法,此种方法可根据事先制定好的控制规则和隶属函数使系统自行调节PID参数,克服了传统PID的缺点[1]。但模糊PID控制的效果非常依赖于控制规则与隶属函数,为了使上述两者向更加合理的方向趋近,本文提出基于模糊模型参考学习控制(FMRLC)的模糊自适应PID控制方法,本方法可根据无人机的实际飞行效果与理想参考模型的对比来对模糊控制规则和隶属函数进行实时修正,进一步优化模糊PID姿态控制效果,增强四旋翼无人机的飞行稳定性。
2 基于FMRLC的模糊自适应PID姿态控制
四旋翼无人机的姿态控制有四个通道,分别控制油门以及横滚角、俯仰角、偏航角三个姿态角,其中影响无人机空中自稳性能的通道为横滚角和俯仰角,由于四旋翼无人机机体的对称性,所以横滚角与俯仰角通道在控制方式以及PID参数调节方面具有相似性,本文以这两个姿态角通道进行研究。
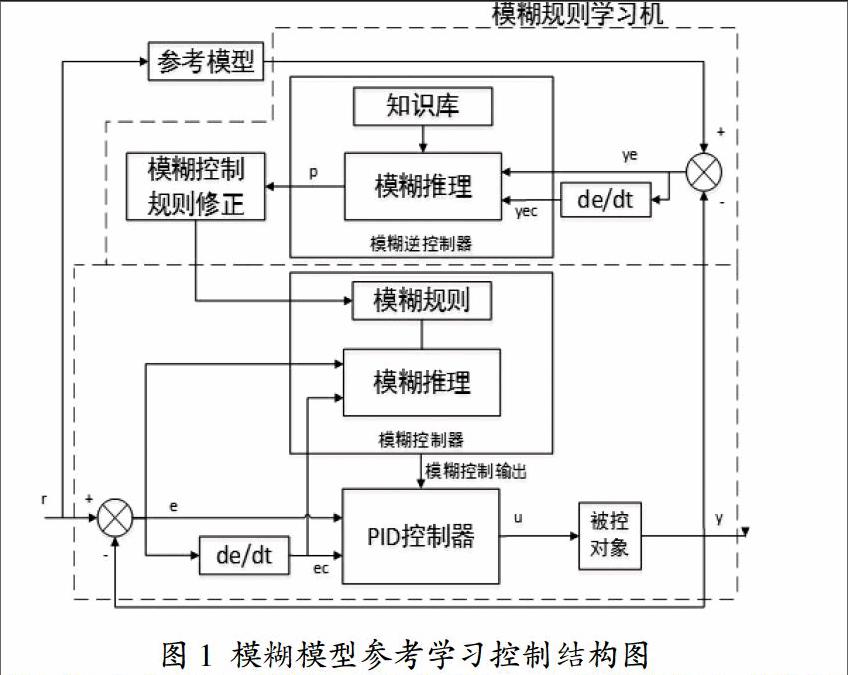
模糊模型参考学习控制(FMRLC)的控制结构图如图1所示,图中下方虚线框内为传统模糊PID控制的结构,其输入为横滚角误差e和误差变化率△e;输出为PID参数变化量△Kp、△Ki、△Kd。模糊控制系统的核心是模糊控制器的设计[2],包括模糊化、模糊推理、模糊规则以及去模糊化,其中模糊規则在本研究中即为姿态角PID参数的控制规则和隶属函数。
将图1上方所示的模糊规则学习机和参考模型加入到传统模糊PID控制之中即为模糊模型参考学习控制,目的是修正模糊控制器中的模糊规则。参考模型是能够产生期望输出的传递函数,四旋翼无人机的姿态角通道在仿真和实验时期望迅速而平稳的动态响应,且超调量尽可能小,理想一阶惯性环节可得到此效果,可将其用作参考模型。把一阶惯性环节阶跃响应当做无人机的理想扰动响应,则参考模型输出与实际输出的误差就可视作广义误差ye;误差变化率为△ye,记作yec,两者即为模糊规则学习机中模糊逆控制器的输入量。
从图1可知,模糊逆控制器与模糊控制器结构相同,其构建流程与模糊控制器也相似,输入与输出设定7个模糊子集:NB、NM、NS、O、PS、PM、PB,依次表示为负大、负中、负小、零、正小、正中、正大。输入参数模糊化之后,结合知识库进行模糊推理,其输出p作为修正量,所改变的则是模糊控制器输出量的隶属函数,修正方式为图线整体在论域轴上的平移,平移量以p为依据,如此即可使输出量隶属函数去模糊化后得到的清晰值相对于传统模糊PID输出量更趋于合理,增强控制系统的适应性。
3 测试
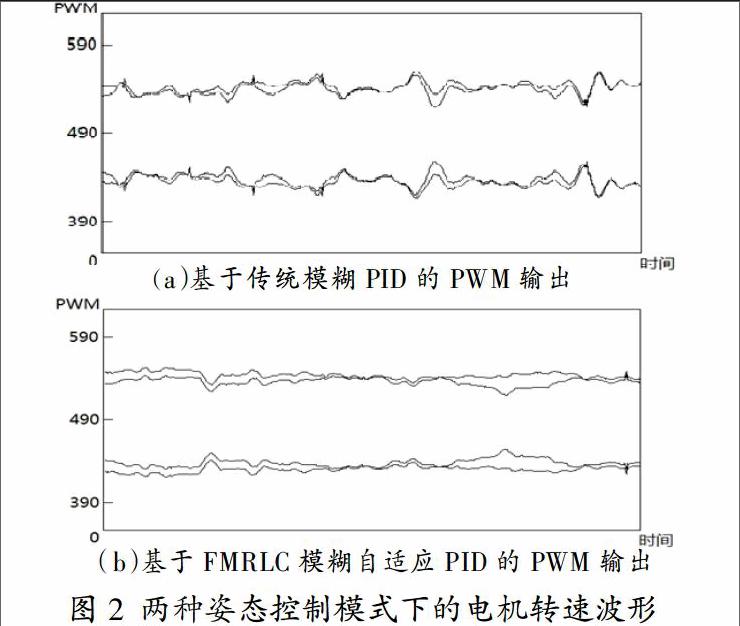
测试用无人机所用机架为X450机架;电子调速器型号为FLYCOLOR 5V 3A-BEC无刷电调;电机型号为朗宇2212-9型1400KV无刷电机。飞控板中主控芯片选用STM32F103RCT6;通信模块选用NRF24L01无线传输模块;姿态传感器选用MPU-6050六轴陀螺仪-加速度计模块。分别采用传统模糊PID与基于FMRLC的模糊自适应PID编写无人机姿态控制模块,随后进行重心(电池)偏置的无人机悬停试验。由于主控制器输出的PWM信号高电平时间与电机转速呈线性关系,故其可以代表电机的当前转速,PWM信号输出平稳说明四旋翼无人机电机转速变化平稳,即代表无人机悬停时抖动幅度小、自稳性能好。
从图2可以看出,(b)中波形明显比(a)中波形幅度变化小且平稳。说明采用基于FMRLC的模糊自适应PID姿态控制的无人机自稳性能更好。
4 结束语
无人机的自稳性能是无人机飞控系统最重要的评判标准,本文将传统模糊PID姿态控制优化为基于模糊模型参考学习控制(FMRLC)的模糊自适应PID姿态控制,通过对比测试表明了后者较之前者有更好的控制效果,印证了设计预期。
参考文献
[1]刘慧博,王静,吴彦合.无刷直流电机模糊自适应PID控制研究与仿真[J].控制工程,2014(04):583-587.
[2]戴俊珂,姜海明,钟奇润,等.基于自整定模糊PID算法的LD温度控制系统[J].红外与激光工程,2014(10):3287-3291.
作者简介:丁承君(1973,9-),男,汉族,河北工业大学,教授,博士生导师。
何乃晨(1990,10-),男,汉族,河北工业大学,硕士研究生。