
基于S3C2440的步进电机速度随动系统的设计
2017-04-25 09:41余康克郑建立东华大学信息科学与技术学院
数码世界 2017年4期
余康克 郑建立 东华大学信息科学与技术学院
基于S3C2440的步进电机速度随动系统的设计
余康克 郑建立 东华大学信息科学与技术学院
为了实现步进电机的高精度控制,通过操作旋转编码器,获得位置、速度信号,解决传统的通过键盘中断控制步进电机导致的精度较低的情况。设计了一套步进电机速度随动系统,此系统将通过手动转动旋转编码器产生的电脉冲信号传入S3C2440处理器芯片进行信号处理,再通过S3C2440处理器芯片控制步进电机驱动芯片驱动步进电机,实现步进电机的高精度,实时手动控制。实验表明,该控制系统能够实现通过手动控制旋转编码器来间接自由地控制步进电机,具有操作灵活、实时性强等特点。此系统能很好的应用在医疗组织切片等场合。
步进电机 旋转编码器 步进电机驱动器 S3C2440
随着医疗行业市场的需求,对步进电机的应用有越来越多的要求本文针对医疗组织切片机,设计了基于S3C2440的步进电机速度随动系统。
1 系统总体框架搭建及控制部分设计
本系统针对医疗组织切片机的具体功能设计了以下四个硬件部分:分别是输入部分的旋转编码器E6B2-CWZ1E,信号处理部分的处理器芯片S3C2440,输出部分的驱动芯片2MD320,和动作部分的步进电机35H34-0404A,硬件总体架构如图1所示。
2 系统各部分具体细节
2.1 输入部分旋转编码器E6B2-CWZ1E
旋转编码器E6B2-CWZ1E是一种将旋转位移转换成数字脉冲信号的精密传感器。特点是小巧,分辨率高,力矩小,耗能低,性能可靠,使用寿命长等特点。我们使用的旋转编码器是增量型编码器,使用的型号为E6B2-CWZ6C。
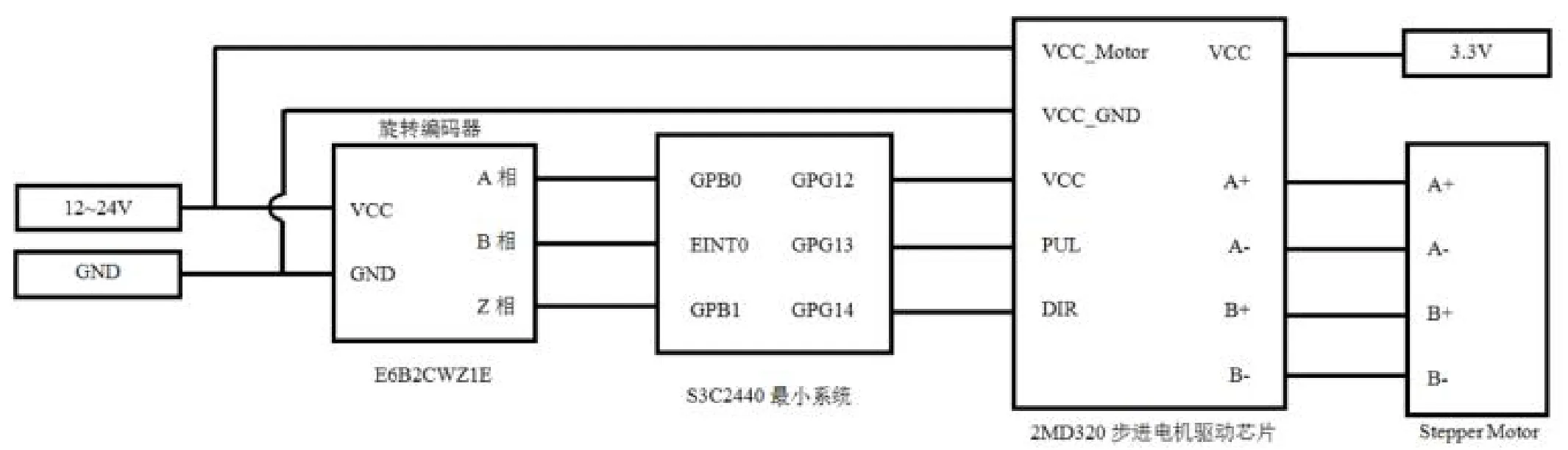
图1 硬件部分基本架构
2.2 信号处理系统设计
2.2.1 S3C2440最小系统
此项目需要一个外部中断接口和五个GPIO接口,于是一个S3C2440芯片的最小系统就能完全满足以上需要。此最小系统包括SDRAM、Flash、调试接口、时钟、电源、复位。
2.2.2 S3C2440中断处理方式
旋转编码器A,B,Z相脉冲信号采集部分采用外部中断方式,通过S3C2440芯片的GPIO口来完成对输入脉冲信号的计数工作。要想正确地执行2440的外部中断,一般需要完成两个部分内容:中断初始化和中断处理函数。中断处理函数负责执行具体的中断指令,为了把这个中断处理函数与在2440启动文件中定义的中断向量表相对应上,需要先定义中断入口地址变量,该中断入口地址必须与中断向量表中的地址一致,然后把该中断处理函数的首地址传递给该变量,即中断入口地址。
2.2.3 旋转编码器鉴相方法
编码器内部把光信号转换成两组近似于正弦的电信号输送出去,然后根据需要把这些信号进行差值或数字化处理,两组正弦信号A、B在相位上相差90°。根据A、B之间的相位关系即通过鉴相可确定旋钮的正反转。当A超前于B时为正转,而当B超前于A时为反转。在1个周期时间T内,S3C2440芯片通过程序能准确判断出A点对于B点的相位情况,鉴相程序流程如图2所示。

图2 鉴相算法流程
2.3 两相步进电机驱动芯片2MD320
2MD320步进电机驱动器是一款高性价比的两相步进电机驱动器,最大可提供2.0A的电流输出。此步进电机驱动芯片的脉冲信号端接S3C2440芯片的GPB13口,方向信号端接S3C2440芯片的GPB14口,其他端口根据具体要求相接。
3 性能测试与实验结果
经搭建的硬件实物和软件编程所做的测试,试验结果表明步进电机能跟随旋转编码器的转动而转动,并且具有较高精度,基本实现了我们所期望的功能。如表1所示为测试平台测试出的脉冲接受率。

表1 测试平台测试出的脉冲接受率
如上所示,测试结果表明可能人为的在转动编码器的时候可能出现手抖的情况,但在硬件之间不存在脉冲的丢失,步进电机的驱动芯片很好的接收了编码器发出的所有脉冲,接受率是100%。
4 结语
本文基于S3C2440芯片的步进电机随动系统实现了某品牌医疗切片机的硬件和软件设计,实现了该品牌切片机的基本功能,后续还可以在S3C2440芯片的平台上继续开发QT界面,使之更好的利用。
[1]姜艳平.编码器发展与应用[J].新自动化,2006(10):61-63
[2]ARM Limited.ARM 920 T Tecnical Reference Manual.2009,9:15
[3]刘升.二相步进电机驱动芯片TA8435H及其应用[J].国外电子元器件.2005(3):37-39
[4]杨和平,周旋,童军.步进电机的特点及应用[J].黑龙江科技信息,2007
余康克,通信作者,男,硕士研究生,主要研究方向:嵌入式技术。郑建立,男,博士,副教授,主要研究方向:微机技术。
猜你喜欢
网络安全与数据管理(2022年1期)2022-08-29
锻压装备与制造技术(2021年5期)2021-11-13
科学技术创新(2021年5期)2021-03-17
有色设备(2021年4期)2021-03-16
——编码器
演艺科技(2020年7期)2020-08-13
数码世界(2019年12期)2019-12-01
北京航空航天大学学报(2019年9期)2019-10-26
智能计算机与应用(2018年6期)2018-10-31
制导与引信(2017年3期)2017-11-02
时代英语·高二(2017年4期)2017-08-11
