
基于修正RSSI值的加权质心定位算法
2017-04-21 00:44董仕鹏
电子科技 2017年4期
陈 璇,董仕鹏
(兰州交通大学 电子与信息工程学院,甘肃 兰州 730070)
基于修正RSSI值的加权质心定位算法
陈 璇,董仕鹏
(兰州交通大学 电子与信息工程学院,甘肃 兰州 730070)
针对利用接收信号强度指示(RSSI)进行节点定位时,RSSI值易受到环境因素的影响导致定位误差。为减小定位误差,在修正加权质心定位算法的基础上,使用卡尔曼滤波对连续采集到的RSSI值进行最优化处理,实现实时状态的预测和估计,使测距结果尽可能接近实际距离,为后续的定位提供更准确的数据。仿真结果显示,相比于之前的算法,改进算法减小了定位误差,提高了定位准确度。
接收信号强度指示;节点定位;卡尔曼滤波;定位误差
无线传感器网络(Wireless Sensor Networks,WSN)[1-3]是一种由成千上万微传感器构成的具有动态拓扑结构的自组织网络。具有无线通信能力的传感器节点,被随机抛洒在没有基础设施的无人区域,以协作的方式来感知、采集节点周围环境中WSN部署者获取所感兴趣的信息。WSN被广泛应用于军事、民用等领域[4-7]。
位置信息是传感器节点采集数据中不可缺少的部分,没有位置信息的检测消息通常没有意义。确定事件发生的位置或采集数据的节点位置是传感器网络最基本的功能之一。定位方法可以分为基于测距定位(Range-based)和无需测距定位(Range-free)两类。测距技术有RSSI、TOA、TDOA等[8]。无需测距的定位算法有质心算法[9]、APIT算法[10]、DV-Hop算法[11]和凸规划算法[12]等。
本文在文献[13]提出的修正加权质心定位算法的基础上,利用卡尔曼滤波[14-15]对RSSI值进行去噪优化处理,以期得到良好的定位精度。
1 算法模型
1.1 RSSI测距
接收信号强度指示(RSSI)测距,通过测量发送功率与接收功率,计算传播损耗,利用理论和经验模型,将传播损耗转化为发送器与接收器的距离,最后采用定位技术估计未知节点的位置。
自由空间传播模型:在无线信号传播过程中,信号强度与传输距离之间存在一定关系,信号会产生一定的损耗和衰减,即信号传播路径损耗[16],其定义如下
Loss=32.44+10k×lg(d)+10k×lg(f)
(1)
式(1)中,Loss为路径损耗;k为路径衰减因子;d为与信源之间距离;f为信号的频率。
(2)
式(2)中,PL(d)是路径损耗;Xδ为环境参数;d0是参考距离;PL(d0)为未知节点在距离d0处接受到的信号强度。节点接收到的RSSI值为
RSSI=Pt-PL(d)
(3)
式(3)中,Pt为发射信号强度;PL(d)为路径损耗。未知节点与信标节点间的距离
(4)
式(4)中,A=Pt-PL(d0)。
1.2 基于RSSI的质心定位算法
质心算法的中心思想是,待定位节点以所有在其通信范围内的信标节点的几何质心作为自己位置坐标的估计值。对于未知节点,其位置坐标的估计值为
(5)
式(5)中,(xi1,yi1)…(xik,yik)为未知节点接收到的信标节点位置坐标。
基于RSSI的加权质心定位算法基本原理是:估计传感器节点的RSSI值,得到传感器节点之间的距离,给每个节点一个权值,反应不同信标节点对未知节点的影响,因此未知节点的坐标计算为
(6)
目前研究学者针对基于RSSI的质心定位算法提出了各种改进算法,例如,韩江洪等人提出了一种基于RSSI的极大似然与加权质心混合定位算法,田晓燕等人提出了基于RSSI的三角形区域最小化的质心定位算法等[17-19]。
2 基于卡尔曼滤波的加权质心定位算法
采用RSSI测距时误差波动范围比较集中,并且有时会有误差峰值,使用卡尔曼滤波算法能够很好的降低这种突然出现的误差峰值,该算法通过对前一阶段的数据统计,从而估算出现在的数据发展趋势,是最优化的自回归数据处理算法,且方法简单、存贮量小。
卡尔曼滤波对RSSI测距方法修正:
(1)创建信号能量测距状态模型
X(k)=AX(k-1)+BU(k)+W(k)
(7)
式(7)中,A为状态转移矩阵;BUk-1为预估的状态控制量;Wk-1为预估的滤波噪声。然后,针对特殊环境,采用自由空间模型与对数距离路径损耗模型分析,建立观察模型方程
Z(k)=HX(k)+V(k)
(8)
X(k)是k时刻的系统状态;U(k)为k时刻对系统的控制量;A和B是系统参数;Z(k)是k时刻的测量值;H为测量系统参数;W(k)和V(k)分别表示过程和测量的噪声,一般被假设成高斯白噪声,它们的Covariance分别为Q和R;
(2)卡尔曼滤波。滤波包括预测和修正,P(k|k-1)是在第k步之前状态下对第k步的预测状态的估计,X(k|k-1)是已知Z(k)时第k步的修正状态估计。
1)预测过程为
X(k|k-1)=AX(k-1|k-1)+BU(k)
(9)
式(9)中,X(k|k-1)为用上一状态预测的结果;X(k-1|k-1)为上一状态最优的结果;U(k)为现在状态的控制量。系统结果更新后再更新对应的Covariance
P(k|k-1)=AP(k-1|k-1)AT+Q
(10)式(10)中,P(k|k-1)是X(k|k-1)对应的Covariance;P(k-1|k-1)是X(k-1|k-1)对应的Covariance;AT表示A的转置矩阵;Q是系统过程的Covariance。
有了现在状态的预测结果,再收集现在状态的测量值,结合预测值和测量值,可以得到现在状态的最优化估算值X(k|k)。
2)修正过程为
K(k)=p(k|k1)HT/[HP(k|k-1)HT+R]-1
(11)
X(k|k)=X(k-1|k-1)+Kg(k)(Z(k)-HX)(k|k-1)
(12)
其中,Kg为卡尔曼增益(Kalman Gain)。
K(k)=P(k|k-1)HT/[HP(k|k-1)HT+R]-1
(13)
得到 状态下最优的估算值X(k|k),更新k状态下X(k|k)的Covariance
p(k|k)=[l-K(k)H]p(k|k-1)
(14)
式(14)中,l为1的矩阵,对于单模型单测量,l=1。
3 算法步骤
对RSSI值进行处理后,在文献[13]提出的修正加权质心定位算法的基础上即可继续进行定位。算法步骤如下:
(1)信标节点向相邻的节点周期性地广播自身的消息,消息中包含信标节点的标识编码和位置数据;
(2)未知节点接收到来自信标节点的连续的RSSI值,利用卡尔曼滤波进行优化处理,得到优化结果作为最后的RSSI值;
(3)未知节点接收到不同信标节点的消息达到设定阈值时,根据步骤(2)得到的RSSI值对相应的信标节点进行从大到小的排列,建立信标节点集合、信标节点位置坐标集合、未知节点到信标节点距离集合,即:信标节点集合B={b1,b2,…,bk};信标节点位置坐标集合p={(x1,y1),(x2,y2),…,(xk,yk)};未知节点到信标节点距离集合D={d1,d2,…,dk};
(4)根据式(4)将RSSI值转化为距离,并对距离进行排序,并分为3组{d1,d2,d3},{d4,d5,d6},{d7,d8,d9};
(5)根据文献[13]提出的修正加权质心算法分别对3组数据进行计算,得到3个顶点坐标,这3个顶点构成一个三角形;
(6)未知节点的坐标估计为这个三角形的质心。
4 仿真结果
利用Matlab7.0进行仿真,仿真区域的大小设为 8 m×8 m,信标节点数为9,未知节点数设为20,节点通信半径设为50 m,路径衰减因子设为3,仿真实验环境中加入均值为0、标准差为5的高斯随机噪声,仿真实验共进行500次,最后定位结果取其平均值
(15)
其中,(x,y)表示未知节点的实际坐标;(x′,y′)表示未知节点的估计坐标,仿真结果如下。
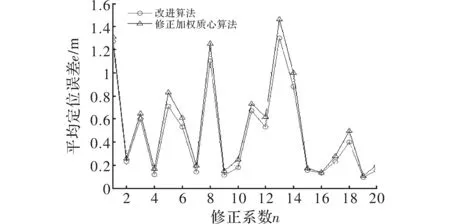
图1 两种算法的平均定位误差曲线
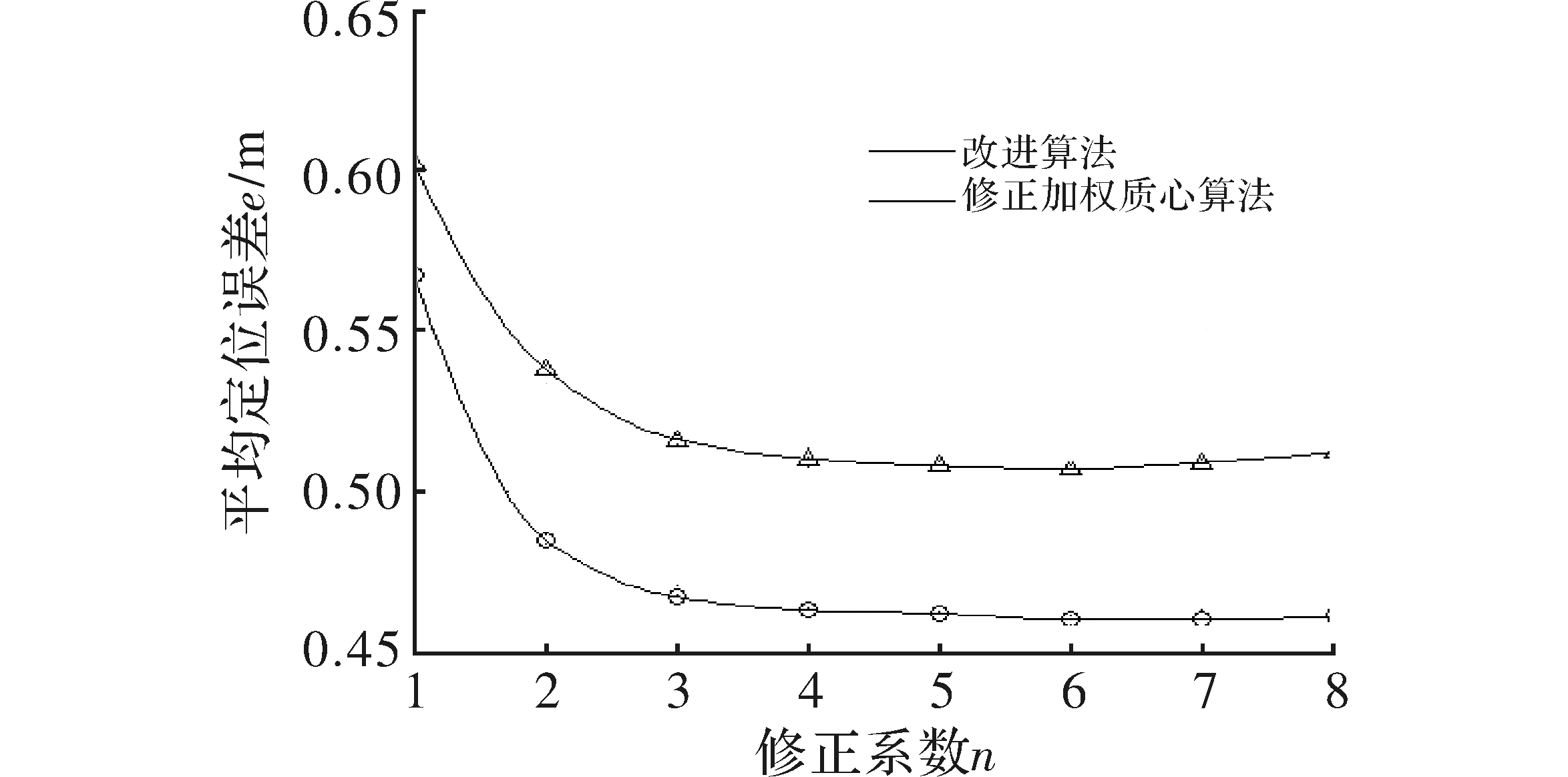
图2 n=5时两种算法对应未知节点的平均误差曲线
从图中可以看出,利用卡尔曼滤波对RSSI值进行修正后再利用修正加权质心定位算法,能在一定程度上减小定位误差,提高定位效果。
5 结束语
改进算法利用卡尔曼滤波对RSSI值进行去噪优化处理,减小了数据误差。相比文献[13]中的算法,在相同的前提条件下,对RSSI值进行修正后再进行定位,减小了平均定位误差,提高了定位准确度。本文针对小区域进行仿真,在后续的研究中将针对大规模区域进行研究仿真。
[1] 许毅.无线传感器网络原理及方法[M].北京:清华大学出版社,2012.
[2] 刘伟荣,何云.物联网与无线传感器网络[M].北京:电子工业出版社,2013.
[3] 孙利民,李建中,陈渝,等.无线传感器网络[M].北京:清华大学出版社,2005.
[4] 美国国防部关键技术计划编写组.美国国防部关键技术计划 [R].北京:国防科技信息中心, 1993.
[5] Johnson P.Remote continuous physiological monitoring in the home[J].Journan of Telemedicine and Telecare,1996,2(2):107-113.
[6] Schwiebert L,Gupta S K S,Weinmann J,et al.Research challenges in wireless networks of biomedical sensors[C].UT,USA:MOBIC,2001.
[7] Mainwaring A,Polastre J,Szeczyk R,et al.Wireless sensor networks for habitat monitoring[C]. Atlanta,Georgia:ACM WSNA02,2002.
[8] 叶阿勇.无线传感器网络节点安全定位[D]. 西安:西安电子科技大学,2009.
[9] Bulusu N,Heidemann J,Estrin D.GPS-Less low cost outdoor localization for very mall devices[J].IEEE Personal Communications,2000,7(5):28-34.
[10] He T,Huang C D,Blum B M,et al.Range-free localization schemes in large scale sensor networks[C].San Diego:Proceeding of the 9th Annual International Conference on Mobile Computing and Networking,2003.
[11] Niculescu D,Nath B.DV based positioning in ad hoc networks[J].Journal of Telecommunication Systems,2003,22(1):267-280.
[12] Doherty L.Algorithms for position anda data recovery in wireless sensor networks[D].Berkeley:University of California,2000.
[13] 刘运杰,金明录,崔承毅.基于RSSI的无线传感器网络修正加权质心定位算法[J].传感技术学报,2010(5):717-721.
[14] 彭丁聪.卡尔曼滤波的基本原理及应用[J].软件导刊,2009(11):32-34.
[15] 杨丹.卡尔曼滤波器设计及其应用研究[D].湘潭:湘潭大学,2014.
[16] Homayoun N,Homayoun H.Phase modeling of indoor radio propagation channels[J].IEEE Transactions on Vehicular Technology,2000,49(2)220-231.
[17] 韩江洪,祝满拳,马学森,等.基于RSSI的极大似然与加权质心混合定位算法[J].电子测量与仪器学报,2013(10):937-943.
[18] 田晓燕,闫斌,唐芸芸.基于RSSI的三角形区域最小化的质心定位算法[J].计算机应用与软件,2014(7):112-115.
[19] 于慧霞.WSN中基于RSSI的加权质心定位算法的改进[J].电子测试,2012(1):28-32.
The Weighted Centroid Localization Algorithm Based on the Modified RSSI Values
CHEN Xuan,DONG Shipeng
(School of Electronic and Information Engineering,Lanzhou Jiaotong University,Lanzhou 730070,China)
When using the received signal strength indicator (RSSI) to locate, RSSI values are easily affected by environmental factors which will cause the localization error.In order to reduce the localization error, using Kalman filter to optimize successive RSSI values based on the modified weighted centroid localization algorithm,achiving real-time prediction and estimation for the purpose of making simulating results close as possible to actual distance so that provide more accurate datas for follow-up localization. Simulation results show that improved algorithm reduced the positioning error, improve the positioning accuracy compared with the former method.
RSSI;node location;Kalman filter;localization error
2016- 05- 24
陈璇(1991-),女,硕士研究生。研究方向:无线传感器网络。董仕鹏(1990-),男,硕士研究生。研究方向:DSP和无线传感器网络。
10.16180/j.cnki.issn1007-7820.2017.04.023
TN926
A
1007-7820(2017)04-092-03
猜你喜欢
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
中国惯性技术学报(2020年6期)2020-04-06
科学(2020年3期)2020-01-06
铁道通信信号(2018年3期)2018-04-19
电子制作(2017年7期)2017-06-05
应用科技(2015年5期)2015-12-09
长春理工大学学报(自然科学版)(2015年4期)2015-12-07
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
全球定位系统(2015年4期)2015-02-28
