
永磁同步电动机恒磁链控制特性分析
2017-04-21 05:18:18方赢海范昕炜
中国计量大学学报 2017年1期
方赢海,范昕炜
(中国计量大学 质量与安全工程学院,浙江 杭州 310018)
永磁同步电动机恒磁链控制特性分析
方赢海,范昕炜
(中国计量大学 质量与安全工程学院,浙江 杭州 310018)
在永磁同步电机数学模型的基础上,根据电机全磁链ψ0和转子永磁体与定子交链的磁链ψf相等的原则,介绍了恒磁链控制法.并通过推导永磁同步电机电磁转矩与定子电流的数学方程,采用查表法建立电流与转矩的拟合关系,使用MATLAB仿真软件建立电机模型,并将恒磁链控制分别与id=0和最大转矩电流比(MTPA)控制方法做了详细对比.仿真结果表明,恒磁链控制法下系统的稳态误差仅有0.478%,稳定性很优秀,且调整时间分别比id=0控制和MTPA控制要快7.7%和27.6%,且功率因数为0.72,均高于id=0控制的0.62和最大转矩电流比控制的0.67.
永磁同步电机;电流控制方法;查表法拟合;恒磁链控制
永磁同步电动机结构简单、体积小、重量轻、损耗小、效率高,在工业农业生产活动及国防等方面,具有相当广泛的应用.到目前为止,矢量控制策略尤其是直接转矩控制策略,是应用在永磁同步电机调速系统最通用的控制策略.因而有必要探索永磁同步传动控制系统优良的控制策略与方法,以期获得其优良性能.
如何实现永磁同步电机瞬时力矩的高性能控制,这是获得高性能永磁同步电机调速控制系统的关键.到目前为止,矢量控制策略尤其是直接转矩控制策略,是应用在永磁同步电机调速系统最通用的控制策略.伴随PMSM的应用越来越广,保证其运行的控制方法也在不断深化.文献[1]提出一种定子磁链控制策略,可以提高一些控制精度,但是需要保证精确的转矩控制效果,从而使得实现过程较为繁琐.文献[2]提出了十二区间圆形控制策略,一定程度体现了该控制方法的可行性及良好的转速控制性能,但它的开关频率要稍大,对逆变器电路具有较大的损耗.文献[3]提出了基于定子磁链同步框架的定子磁通矢量估计直接转矩控制,可以仅通过3个测量点,实现直接转矩控制,但是考虑到永磁电机磁饱和与交叉耦合效应,需要在d-q转子同步坐标系建立大量复杂的数学模型,计算过程繁琐拖沓.恒磁链控制原理是通过控制电机定子电流,令其电机全磁链等于转子永磁体产生的与定子交链的磁链.它作为PMSM的经典控制方法之一,正在慢慢被国内外学者所关注.本文通过介绍恒磁链控制法,与传统的id=0控制、最大转矩电流比控制[4-6],对输出转矩、转速、稳态性能及控制系统主要指标进行分析研究并做了对比,总结出恒磁链控制方法相对于前两种控制法的优点和其适用场合.
1 永磁同步电机的数学模型及矢量控制
永磁同步电机的内部结构及绕组等效模型如图1,将定子三相绕组产生磁场的方向规定为该相绕组轴线正方向并作为空间坐标轴的参考线,建立三相静止ABC坐标系,逆时针为角速度的正方向.在此沿用理想电机的数学模型.为了简化分析,现做如下假设[7-8]:
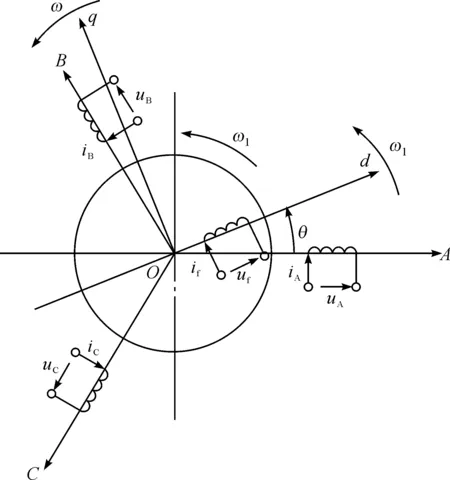
图1 永磁同步电机等效模型图Figure 1 Equivalent model of permanent magnet synchronous motor
1)定子三相绕组在空间对称分布,气隙磁势和磁密在空间正弦分布;
2)忽略磁路饱和及铁芯损耗;
3)忽略温度对电机参数的影响;
4)永磁体在气隙中产生的磁场是正弦分布的,无高次谐波.
1.1 永磁同步电机模型
其在d-q-o同步旋转坐标系的磁链方程:
ψd=Ldid+ψf,
(1)
ψq=Lqiq.
(2)
电压方程
(3)
(4)
永磁同步电机电磁转矩方程
Te=Pn[ψfiq+(Ld-Lq)idiq].
(5)
式(1)~(5)中:id为d-q-o同步旋转坐标系下的直轴电流,iq为交轴电流,Ld为电机直轴电感,Lq为电机交轴电感,Rs为电机定子电阻,ψd为电机直轴磁链,ψq为电机交轴磁链,ud为电机直轴电压,uq为电机交轴电压.
1.2 永磁同步电机的恒磁链控制
相比于传统的id=0控制和最大转矩电流比控制,恒磁链控制策略能获得较高功率因数,从而获得优秀的稳态性能,也有其实用之处.根据已建立的永磁同步电机模型,通过控制电机定子电流,令其电机全磁链ψ0等于转子永磁体产生的与定子交链的磁链ψf,即有:
(6)
可解得
(7)
以及定子电流is:
(8)
将式(5)和式(7)联立求解,可得电机电磁转矩和定子直轴电流之间的关系:
(9)
根据式(6)~(9),画出Te随is变化的曲线,再将Te、is坐标轴转换,从而得到is随Te变化的曲线,也即图2.
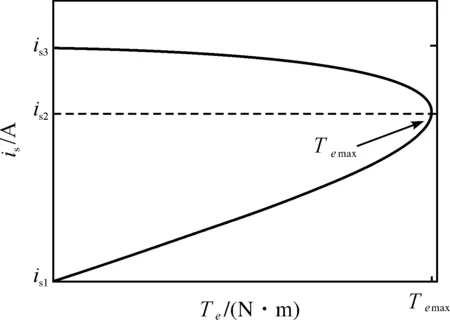
图2 is与转矩关系图Figure 2 Relationship between torque and is
采用恒磁链控制时,为保证系统的工作正常,通常工作点都选择在较小的电流区间.因此曲线以Te max为界,取下半部分曲线,在is1~is2区间,电流随输出电磁转矩增大而增大,在电流is2处,电机电磁转矩达到极大值.
1.3 恒磁链控制的实现
通过上述永磁同步电机建模及其分析,采用恒磁链控制策略可得到其控制框图如图3.由于在数字系统中,CPU的资源有限,需要考虑运算时间.只要给定电机参数,则is和Te的变化关系能提前获取.这两个量的变化关系可以储存在一个表中,如图2.因此,对永磁同步电机进行速度采样,通过速度环得到转矩Te,再经查表法,得到对应转矩Te下的定子电流分量id和iq值,再经PI调节器得到直、交轴电压Ud、Uq,对其进行:q旋转坐标变换及α、β坐标变换产生SVPWM脉冲波驱动逆变器正常工作.
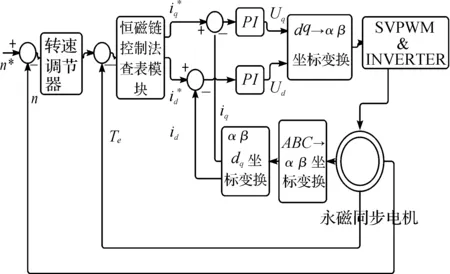
图3 永磁同步电机恒磁链控制框图Figure 3 Permanent magnet synchronous motor constant flux control block diagram
恒磁链控制法查表模块需要通过给定Te反推计算得出id、iq.对于给定电磁转矩Te,会对应两个电流值id.考虑到系统能正常工作需要的电流大小,通常选择在is1~is2的电流作为工作区间,如此可使电机定子工作电流较小,因而铜耗较小,便于逆变器正常工作.因此通过速度环得到给定Te,采用查表法,建立Te与id、iq一一对应的表,反推出is1~is2区间对应的id、iq.
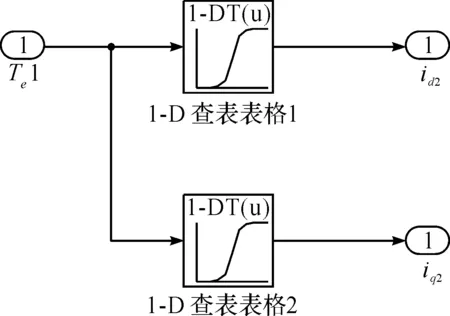
图4 查表法获得id,iqFigure 4 Lookup table method to obtain id,iq
图3控制框图中的恒磁链控制法查表模块子系统如图4,查表法涉及的变量Te、id、iq均来自图2所示数据.
2 SIMULINK仿真系统及结果分析
针对以上准备,采用Matlab/Simulink R2014b版本仿真工具箱建立模型,系统采用中点钳位型三电平逆变器,它具备效率高,性能好,对电机以及电网产生的谐波少等优点.逆变器的调制则使用SVPWM法,能提高直流侧的电压利用率从而减小转矩波动,并抑制电流畸变[9-10].仿真电机参数为Udc=310 V,Rs=0.62 Ω,ψf=8.627e-2Wb,Ld=2.075e-3H,P=2,J=8e-4 kg·m2,n=1 000 r·min-1.仿真结果如图5~8.
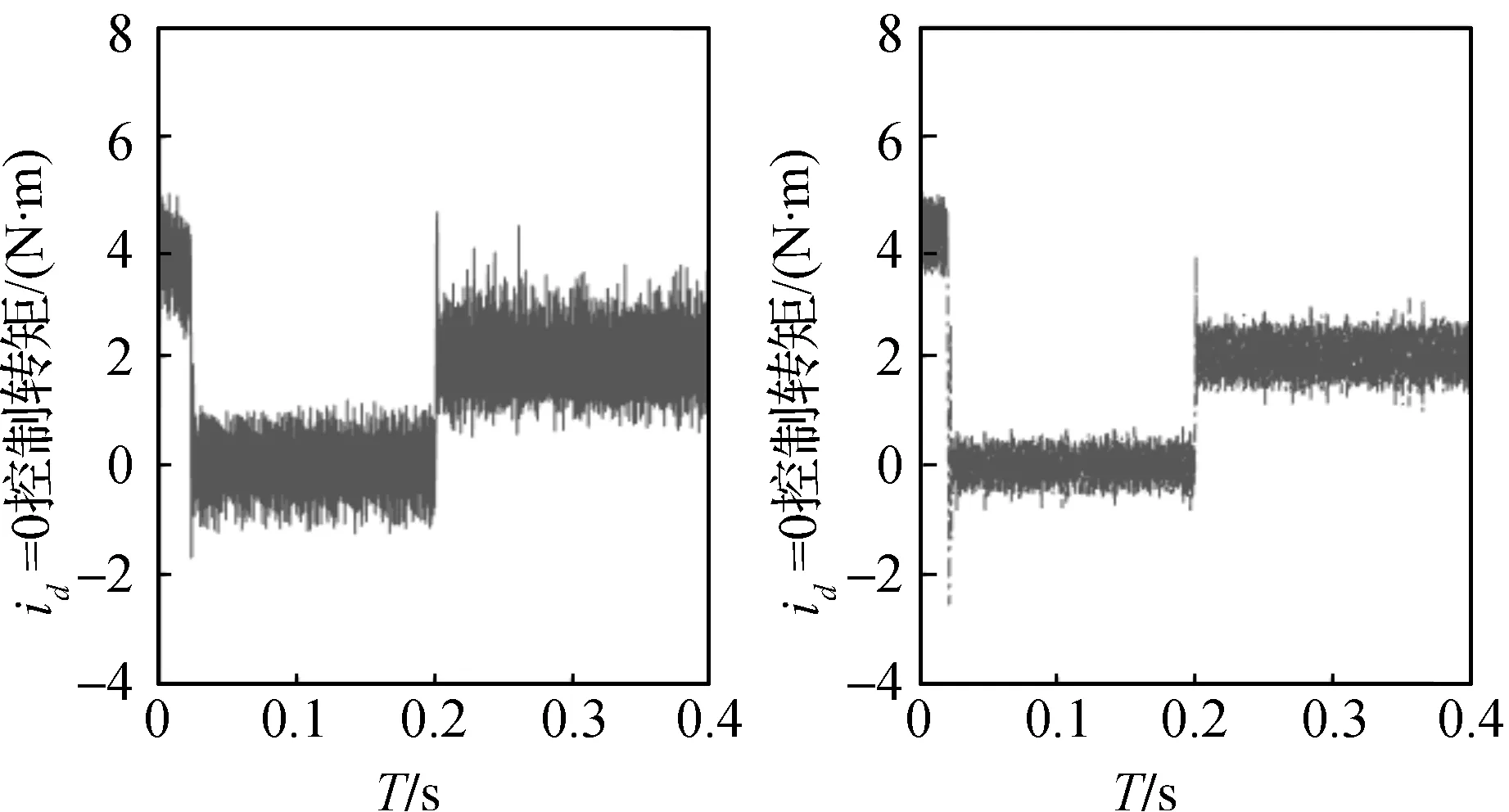
图5 id=0控制与恒磁链控制转矩波形图Figure 5 id=0 and constant flux linkage control torque waveforms
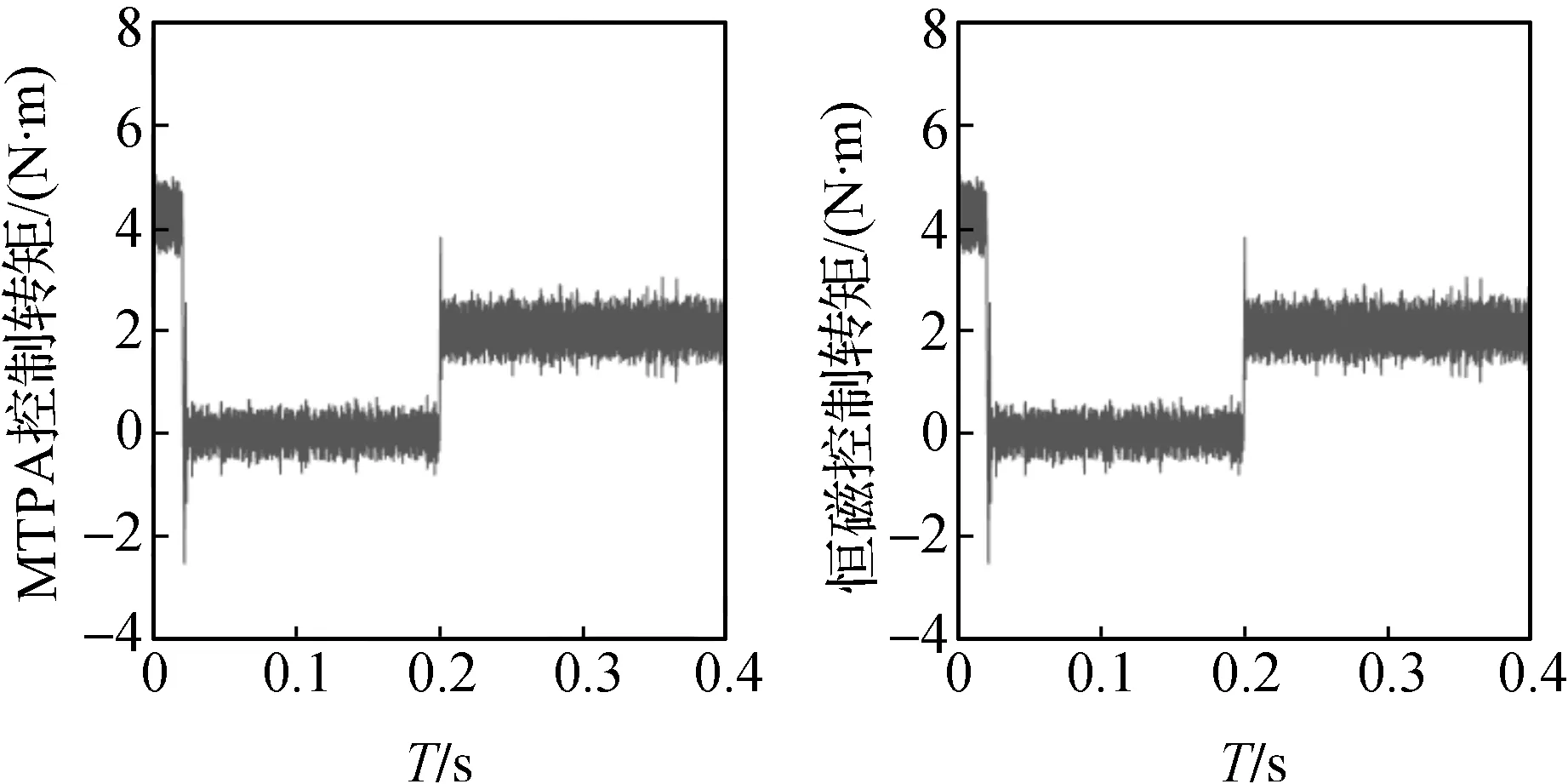
图6 MTPA控制与恒磁链控制转矩波形图Figure 6 MTPA control and constant flux linkage control torque waveforms
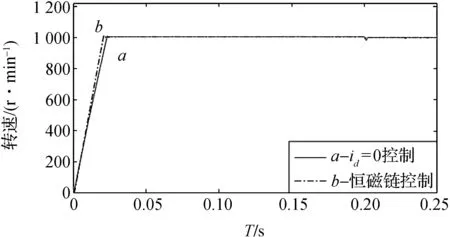
图7 id=0控制与恒磁链控制转速波形图Figure 7 id=0 control and constant flux linkage control speed waveforms
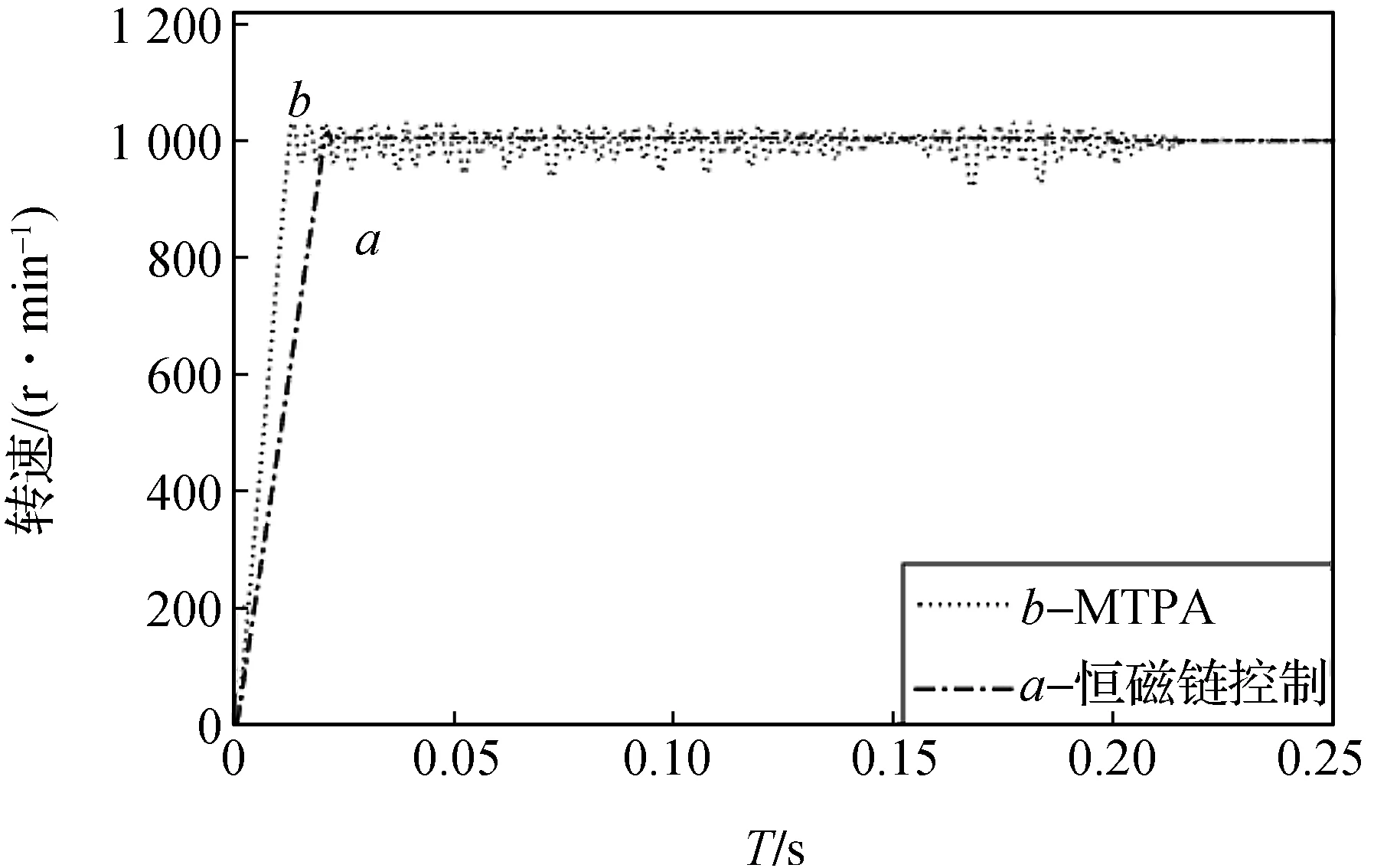
图8 MTPA控制与恒磁链控制转速波形图Figure 8 MTPA control and constant flux linkage control speed waveforms
三种控制法下的控制系统均在0 s时空载启动,仿真时长为0.4 s,并在进入稳态且达到相同的给定转速时,于0.2 s时突加相同负载转矩2 N·m.由图5~6转矩波形仿真结果分析可得,3种控制方法在启动阶段都能保持较大启动转矩,经较小冲击后恢复稳态.图7~8知,恒磁链控制法的系统启动转速比id=0启动过程快,响应更灵敏;比MTPA启动则更显得平稳,系统进入稳态转速所需时间更短.三种控制法下,系统进入稳态之后,电磁转矩平均值都接近0,此时电流控制器的限幅作用十分有效.在突加负载转矩2 N·m后,三种控制法下的控制系统转速在极短时间里有小幅突降,但很快恢复到新平稳状态.此时可见恒磁链控制下的转矩脉动,很明显比前两种控制方法的转矩脉动都要小,证明了恒磁链控制系统的动态性能好,并且系统稳态静差[11]在0.5%以内,再次证明恒磁链转矩控制相比id=0控制和MTPA控制,其稳态性能更好.图7~8表明了恒磁链控制下的转速调整时间ts仅需2.285e-2 s,相比传统的两种控制法能更快达到稳态.
如图9,曲线表示电机全磁链和转子永磁体产生的与定子交链的磁链ψf的误差,仿真在0.2 s进入稳态后结果稳定在0左右,验证了运行过程严格满足恒磁链控制的要求,进一步证明了该控制策略的正确性.
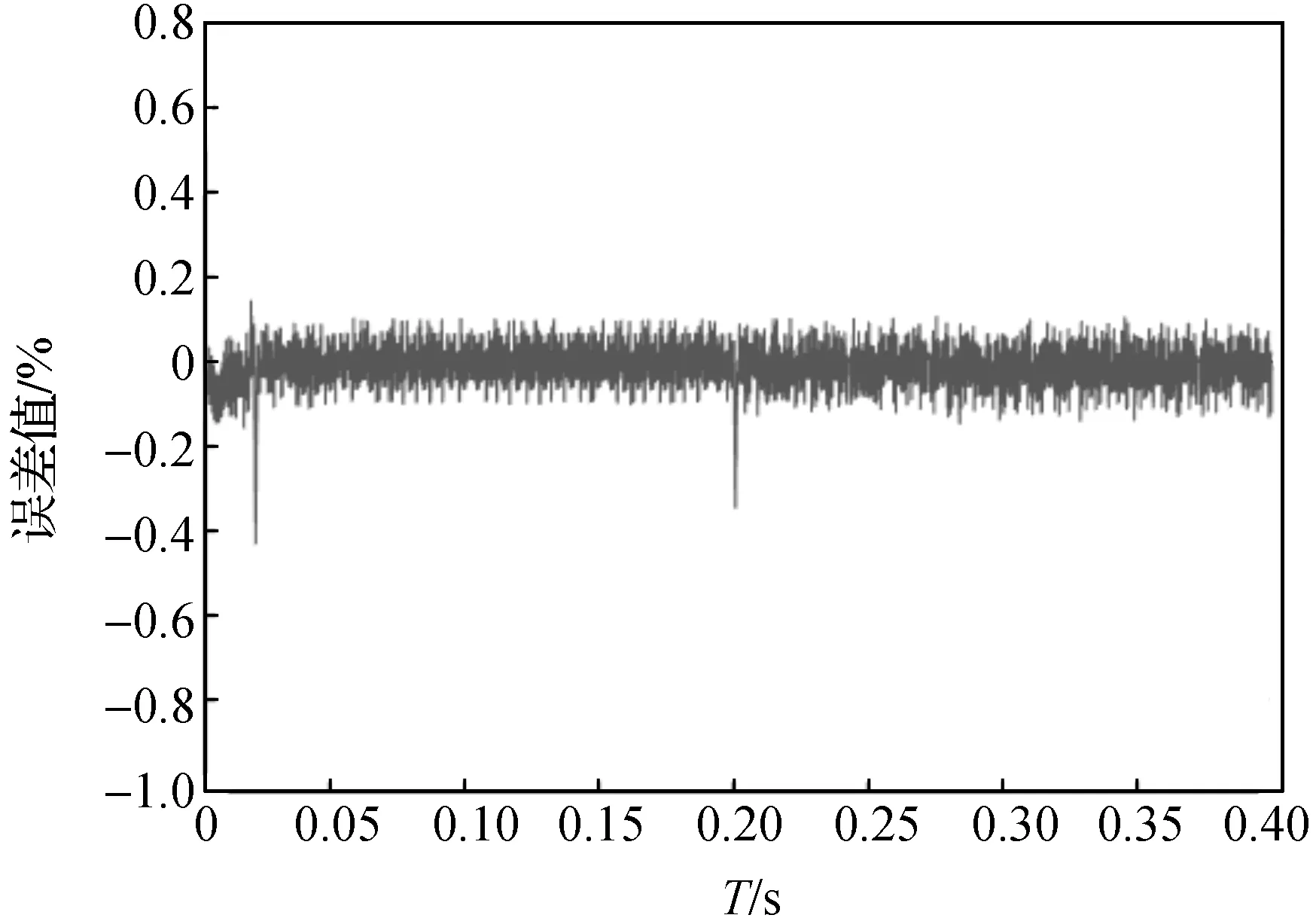
图9 电机全磁链ψ0与转子磁链ψf差值比较Figure 9 Comparison of the difference between the full flux linkage ψ0 of motor and rotor flux ψf
表1是三种控制方法的量化比较结果.恒磁链控制法一定程度上提高了电机的最大输出转矩.
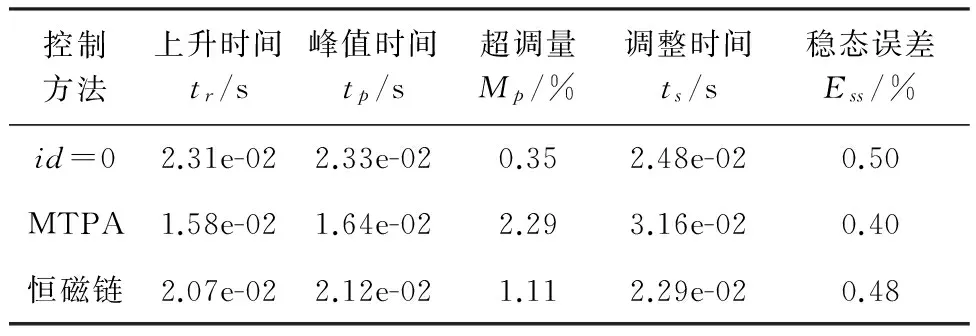
表1 三种电流控制法下的控制系统主要参数
在表示系统动态调整过程快慢的指标上,调整时间仅有2.285e-2s,分别比id=0控制和MTPA控制要快7.7%和27.6%,在表征系统稳定性的指标上,稳态误差仅有0.478%,体现出该控制的优越性.
此外,提高功率因数的意义,一是减小输电线路上的功率损失;二是充分发挥逆变器的潜力.针对大功率电机调速系统,由于能通过获得较高的功率因数,从而充分利用逆变器的容量,因此采用恒磁链控制法比较合适.图10则直观的给出了3种控制方法在不同输出转矩下的功率因数变化,可以看出随着负载转矩的增加,前两种传统控制法的功率因数下降比恒磁链控制要快.在给定负载为2 N·m时,恒磁链控制的功率因数为0.72,均高于id=0控制的0.62和最大转矩电流比控制的0.67.故恒磁链控制法能达到相对高的功率因数,能在一定程度上提高电机的最大输出转矩.
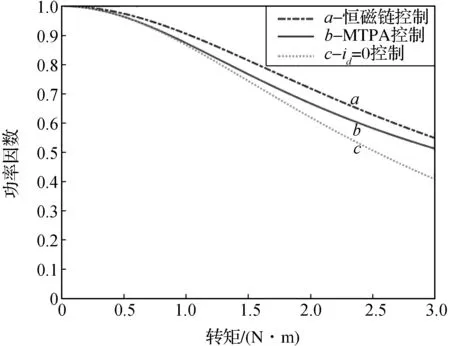
图10 三种控制方法的功率因数随转矩变化图Figure 10 Variation of power factor among the change of torque of three control methods
3 结 论
恒磁链控制策略也是有实用需求的控制策略,它能保证电动机端电压恒定,因而可以满足希望电动机端电压变化小的实际需求.在SVPWM三电平逆变器基础上采用恒磁链控制永磁同步电动机与id=0控制和最大转矩电流比控制相比,经过理论分析及仿真得出:
1)id=0的控制方法较简单,由于直轴电流为0,因而没有直轴电枢反应与去磁效应.
2)相比id=0控制和恒磁链控制方式,恒磁链控制方法的功率因数比较高,这在一定程度可以提高电机输出转矩的效率,还能获得优秀的稳态性能.但是最大输出力矩有一定的限制.
3)通过推导永磁同步电机电磁转矩与定子电流的数学方程,采用查表法建立电流与转矩的拟合关系,恒磁链控制法下系统的相对稳定性很优秀,调整时间分别比id=0控制和MTPA控制要快7.7%和27.6%,稳态误差仅有0.478%.
[1] 朱昊,肖曦,李永东.永磁同步电机转矩预测控制的磁链控制算法[J].中国电机工程学报,2010(21):86-90. ZHU H, XIAO X, LI Y D. Stator flux control scheme for permanent magnet synchronous motor torque predictive control[J].Proceedings of the CSEE,2010(21):86-90.
[2] 廖晓钟,周乐芳.直接转矩控制的磁链控制研究[J].电机与控制学报,2005(2):190-195. LIAO X Z, ZHOU L F. Flux control research in direct torque control (DTC)[J].Electric Machines and Control,2005(2):190-195.
[3] INOUE T, INOUE Y, MORIMOTO S, et al. Maximum torque per ampere control of a direct torque-controlled PMSM in a stator flux linkage synchronous frame[J].IEEE Transactions on Industry Applications,2016(52):2360-2367.[4] SUN T F, WANG J B, CHEN X. Maximum torque per ampere(MTPA) control for interior permanent magnet synchronous machine drives based on virtual signal injection[J].IEEE Transactions on Power Electronics,2015(30):5036-5045.
[5] 史光辉,于佳,张亮.永磁同步电动机最大转矩电流比控制[J].现代驱动与控制,2009(5):28-31. SHI G H, YU J, ZHANG L. The maximum torque per ampere control of permanent magnet synchronous motor[J].Electrical Machinery Technology,2009(5):28-31.
[6] 曹晖,罗峰,周盼,等.永磁同步电机最大转矩电流比控制的仿真研究[J].微电机,2015(6):55-59. CAO H, LUO F, ZHOU P, et al. Simulation research on maximum torque per ampere control of permanent magnet synchronous motor[J].Micromotors,2015(6):55-59.
[7] 王军.永磁同步电机智能控制技术[M].四川:西南交通大学出版社,2015:4-9.
[8] 王桂荣,李太峰.永磁同步电机无传感器控制仿真研究[J].中国计量学院学报,2011(4):344-348. WANG G R, LI T F. Simulation research on sensorless control of PMSM[J].Journal of China University of Metrology,2011(4):344-348.
[9] SEO J H. A new simplified space-vector PWM method for three-level Invertors[J].IEEE Transactions on Power Electronics,2001,16(4):545-547.
[10] 宋文祥,陈国呈,束满堂,等.中点箝位式三电平逆变器空间矢量调制及其中点控制研究[J].中国电机工程学报,2006,26(5):105-109. SONG W X, CHEN G C, SHU M T, et al. Research on SVPWM method and its neutral-point-potential control for three-level neutral-point-clamped(NPC) inverter[J].Proceedings of the CSEE,2006,26(5):105-109.
[11] 邹伯敏.自动控制理论[M].北京:机械工业出版社,2015:71-73.
An analysis of permanent magnet synchronous motors with constant flux linkage control
FANG Yinghai, FAN Xinwei
(College of Quality and Safety Engineering, China Jiliang University, Hangzhou 310018, China)
We introduced the mathematical model of permanent magnet synchronous motors(PMSM) according to the principle of the full flux linkage of motors and the rotor flux intersected by the stator flux being equal as well as the theory of constant flux linkage control. Through the mathematical equation of electromagnetic torque and the stator current of permanent magnet synchronous motors, the relationship between the current and the torque was established by the fitting method of table lookup. The motor model was established by using MATLAB software simulation. The constant flux linkage control was compared with the control ofid=0 and maximum torque per ampere. The simulation results indicated that under constant flux linkage control, the steady-state error was 0.478%, the adjusting time was 7.7% and 27.6% faster than the first two kinds of control. Meanwhile, the power factor of constant flux linkage control was 0.72, which was also greater than that of the first two kinds of control(0.72 and 0.62) respectively.
permanent magnet synchronous motor; current control methods; fitting method of look-up table; constant flux linkage control
2096-2835(2017)01-0063-05
10.3969/j.issn.2096-2835.2017.01.011
2016-12-26 《中国计量大学学报》网址:zgjl.cbpt.cnki.net
方赢海(1991- ),男,浙江省杭州人,硕士研究生,主要研究方向为永磁同步电机的检测与控制. E-mail:reggie_fang@163.com. 通信联系人:范昕炜,男,博士.E-mail:fxw@cjlu.edu.cn.
TM351
A
猜你喜欢
基层中医药(2022年5期)2022-10-24 01:27:32
防爆电机(2020年6期)2020-12-14 07:16:54
电子制作(2018年2期)2018-04-18 07:13:31
上海公路(2017年1期)2017-07-21 13:38:33
光学精密工程(2016年3期)2016-11-07 09:03:49
现代工业经济和信息化(2016年12期)2016-05-17 05:37:56
电测与仪表(2016年10期)2016-04-12 00:26:38
华东理工大学学报(自然科学版)(2015年2期)2015-11-07 09:16:20
大电机技术(2015年5期)2015-02-27 08:22:28
电测与仪表(2014年23期)2014-04-04 12:08:30
