
蔬菜自动嫁接技术研究现状与发展分析
2017-04-19 09:05张凯良张铁中孔艳山
农业机械学报 2017年3期
张凯良 褚 佳 张铁中 尹 权 孔艳山 刘 展
(中国农业大学工学院, 北京 100083)
蔬菜自动嫁接技术研究现状与发展分析
张凯良 褚 佳 张铁中 尹 权 孔艳山 刘 展
(中国农业大学工学院, 北京 100083)
嫁接在提高作物抗病能力、生长速度、单位产量,减少施肥、施药等方面具有积极作用,是多类蔬菜大规模生产的重要环节,而自动化嫁接能够有效提高嫁接效率和嫁接苗成活率,正在成为蔬菜商业化生产的刚性需求。本文对中国、日本、荷兰、西班牙、意大利等国蔬菜自动嫁接技术的研究现状和发展动态进行了分析;归纳出5项蔬菜自动化嫁接关键技术:幼苗机械化抓取技术,幼苗自动输送技术,砧、穗木切削技术,砧、穗木接合固定技术,自动嫁接系统控制技术,并逐一进行了阐述;最后对目前本领域的研究特点和发展趋势进行了总结和展望,认为蔬菜嫁接自动化程度将进一步提高,单机嫁接规模将进一步扩大,农艺、人工智能、人因工程等间接因素将为自动嫁接机未来的性能提升带来助力。
蔬菜; 自动嫁接; 机器人
引言
嫁接栽培可以利用砧木根系发达、抗病、耐热和吸肥力强的优势,是克服设施瓜菜连茬病害和低温障碍的重要途径,能够有效增强蔬菜的抗逆性和抗病能力,在减少肥料施用的同时促进幼苗健壮生长和提早收获,对于蔬菜作物的增产效果显著[1]。嫁接技术最早出现于2000多年前的中国,日本于1925年开始将其用于瓜类蔬菜生产,中国在20世纪70年代中期出现将黄瓜嫁接于南瓜之上的栽培技术,20世纪80年代后蔬菜嫁接栽培技术已经遍及中国、日本和欧美各国[2]。自动嫁接技术是指将传统的人工嫁接过程由机械自动化的方式替代,实现嫁接过程中取苗、供苗、嫁接贴合、排苗栽植等作业全部或部分自动化甚至智能化,从而提高嫁接工作效率和嫁接苗成活率。
随着现代社会人类生活的节奏加快和品质提高,人们对蔬菜的需求量和质量要求也在逐步增加[3],嫁接成为蔬菜生产中不可或缺的环节之一。传统的人工嫁接对劳动者技术要求较高且费时、费力、工作效率低;在某些时令要求下,常需要在短期内处理大量嫁接苗,从而进一步增加了人工劳动强度,在农业劳动力成本日益增加的今天,采用自动化嫁接方式更显得必要[4]。
1 国内外研究现状
对于蔬菜自动嫁接机的研究,在日本、韩国、荷兰、意大利以及中国等设施农业较为发达的国家得到的关注和取得的成果较多[5-12]。目前较为典型的蔬菜嫁接机及其相关信息见图1和表1。

图1 国内外典型嫁接机机型Fig.1 Typical vegetable grafting machines表1 国内外典型嫁接机信息Tab.1 Information of typical vegetable grafting machines
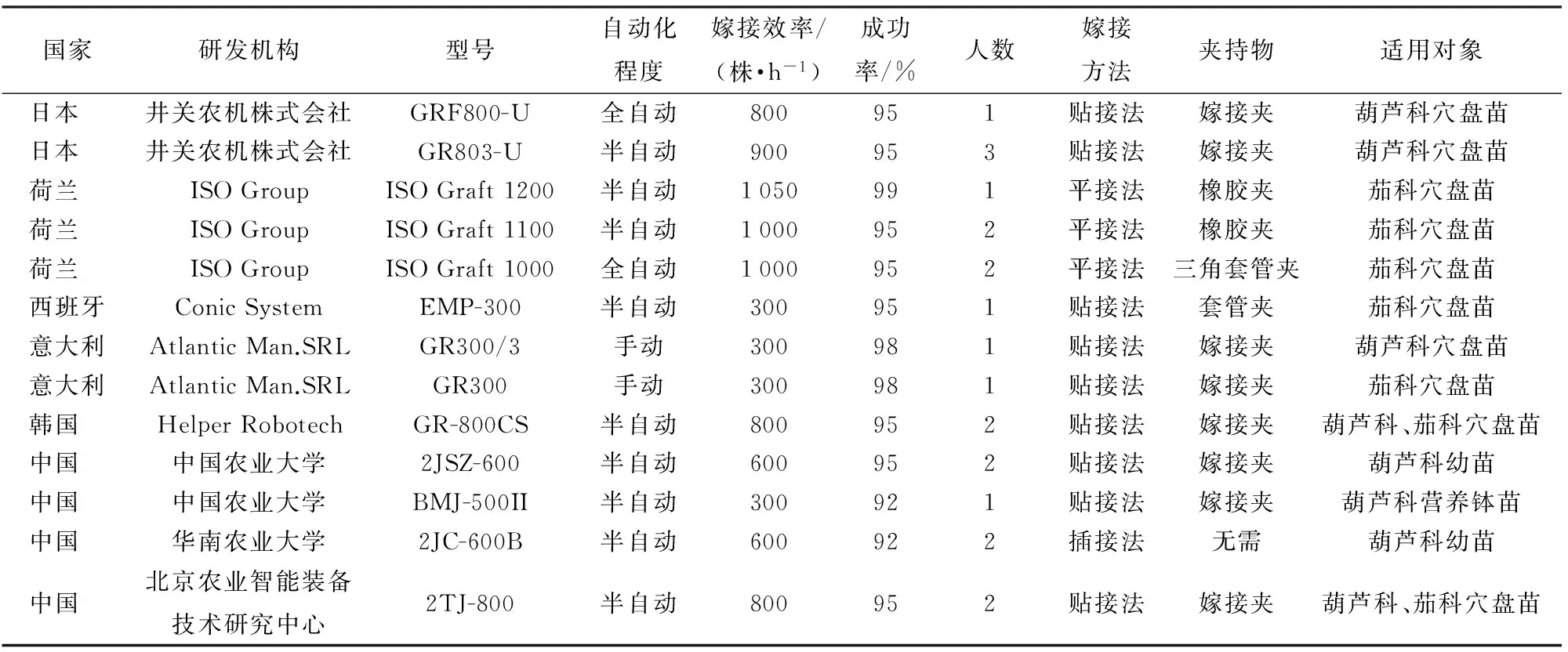
国家研发机构型号自动化程度嫁接效率/(株·h-1)成功率/%人数嫁接方法夹持物适用对象日本井关农机株式会社GRF800-U全自动800951贴接法嫁接夹葫芦科穴盘苗日本井关农机株式会社GR803-U半自动900953贴接法嫁接夹葫芦科穴盘苗荷兰ISOGroupISOGraft1200半自动1050991平接法橡胶夹茄科穴盘苗荷兰ISOGroupISOGraft1100半自动1000952平接法橡胶夹茄科穴盘苗荷兰ISOGroupISOGraft1000全自动1000952平接法三角套管夹茄科穴盘苗西班牙ConicSystemEMP-300半自动300951贴接法套管夹茄科穴盘苗意大利AtlanticMan.SRLGR300/3手动300981贴接法嫁接夹葫芦科穴盘苗意大利AtlanticMan.SRLGR300手动300981贴接法嫁接夹茄科穴盘苗韩国HelperRobotechGR-800CS半自动800952贴接法嫁接夹葫芦科、茄科穴盘苗中国中国农业大学2JSZ-600半自动600952贴接法嫁接夹葫芦科幼苗中国中国农业大学BMJ-500II半自动300921贴接法嫁接夹葫芦科营养钵苗中国华南农业大学2JC-600B半自动600922插接法无需葫芦科幼苗中国北京农业智能装备技术研究中心2TJ-800半自动800952贴接法嫁接夹葫芦科、茄科穴盘苗
1.1 国外研究现状
日本对蔬菜嫁接机的研究始于20世纪80年代,经过30多年的研究发展,先后由不同机构研制出多种自动嫁接机,其中井关农机株式会社研制的自动嫁接机最具代表性。1994年,井关农机株式会社与日本生研机构共同合作推出了GR800B型葫芦科半自动嫁接机和GR800T型茄科半自动嫁接机,其生产效率可达800株/h,嫁接成功率为95%。2011年,井关公司研制出GRF800-U型葫芦科全自动嫁接机以及GRF803-U型葫芦科半自动嫁接机[13-14]。该类机型适用于瓜科蔬菜嫁接贴接法嫁接,通过嫁接夹固定贴合面。GRF800-U能够完成嫁接于砧穗木的自动取苗、上苗、嫁接及排苗过程,还设有幼苗子叶定向装置。其嫁接效率可达800株/h,嫁接成功率达95%。GR803-U是半自动机型,它将机械自动取苗功能改为2名工人分别供应砧穗苗,因供苗速度比机械快,因此嫁接速率提升至900株/h[15]。这两款机型都采用了人机交互技术,工人可通过显示屏进行触控操作,对机器进行相关调试与操作,机器在嫁接过程中也可自动对嫁接作业进行数据记录,以便合理管控。韩国对蔬菜嫁接机的研究相对晚于日本,但产品有其独自的特色。20世纪90年代初,韩国开始对嫁接机展开研究,开发出小型半自动式嫁接机[1]。该机采用靠接法进行嫁接,依靠凸轮传递动力,完成砧穗木的夹持、切削以及对接等动作,嫁接效率最高可达310株/h,嫁接成功率为90%。因其结构简单、操作便捷、价格低廉,在韩国、日本及我国有一定使用,但是,由于采用靠接法嫁接,推广受到一定限制。韩国Helper Robotech公司开发了GR-800CS型自动嫁接机[16],该机有两名操作人员,可进行茄科和瓜科蔬菜的嫁接,嫁接效率可达800株/h。
荷兰近几年在自动嫁接机领域也有一定发展,主要是ISO Group Machinebouw公司研制的几种机型,包括ISO Graft 1000、1100、1200型,这3种机型都是针对茄科幼苗进行嫁接作业。ISO Graft 1000型自动嫁接机是一套茄科幼苗嫁接作业流水线,主要采用平接法嫁接,固定方式使用三角耳套管,由相应的机械在嫁接时打开套管开口[17],使苗株直接插入接合后嫁接,整个生产流水线由1~2名工人进行全程操作,它还采用图像处理技术,在嫁接前期可对幼苗进行初步判别,剔除不合格的幼苗,采用的计算机技术亦可对嫁接过程进行数据记录与处理,从而更好地对嫁接作业进行管理。2013年, ISO Group Machinebouw公司又研制出针对茄科苗的ISO Graft 1200型半自动嫁接机[18]。该机采用贴接法嫁接,利用一端开口的套管夹进行砧穗木的贴合固定。该机配有砧木预处理机构,主要对砧木进行前期的粗切,去除上部枝叶。该机的穗木部分由一个转盘构成,分成可容纳12株穗木的穗木夹持机构,穗木的搬运机构采用关节机械臂。工作时,需要由操作人员将穗木放到穗木夹持转盘内,其余工作过程由机器自动完成,砧木留盘嫁接。其嫁接效率可达1 050株/h以上,成功率可达99%。2014年,ISO Group Machinebouw又开发出ISO Graft 1100型半自动茄科蔬菜嫁接机[19]。该机需要操作人员将砧木和穗木同时上苗,砧木部分由平均分成12个工位的转盘进行连续作业,嫁接作业自动完成,其嫁接效率可达1 000株/h。对于单株嫁接方式来说,ISO Graft 1200与ISO Graft 1100效率都较高。
西班牙Conic System公司研制的EMP-300型半自动嫁接机[20]采用单人操作模式,适用于茄科幼苗的嫁接作业,嫁接时,穗木和砧木由单人分别左右手持供苗,再由机械进行自动切苗、贴合,最后完成套管夹嫁接接合作业,其作业效率可达300株/h以上,其操作相对比较简单。
意大利Atlantic Man.SRL公司研发出GR300/3型和GR300型嫁接机[21],前者是针对葫芦科幼苗的嫁接,采用单子叶贴接法进行嫁接,后者在切削机构上有一定的改变,适用茄科幼苗的嫁接。嫁接过程中,由单人进行供苗,自动完成的作业主要是切削及贴合过程,采用人工进行固定,嫁接速度为300株/h左右。
1.2 国内研究现状
中国对蔬菜嫁接机的研究相对国外起步较晚。但近年来,随着农业生产对自动化需求的不断增加,蔬菜嫁接机也有了一定的发展,其研究主要集中在高校及科研院所。中国农业大学张铁中教授率先在国内开展蔬菜嫁接机研究,1998年成功研制出2JSZ-600型蔬菜半自动嫁接机[22],嫁接机采用单子叶贴接法,实现了砧穗木的取苗、切削、接合、嫁接夹固定、排苗作业的自动化。嫁接时砧木可直接带土进行嫁接,嫁接效率可达600株/h,成功率可达95%,适用于西瓜、甜瓜、黄瓜等瓜科蔬菜苗的自动化嫁接作业。其后,在此基础上,研制出采用双臂方式嫁接的机型[23],嫁接效率提高了30%。此后,中国农业大学继续对蔬菜嫁接机展开了不同程度的研究,分别针对瓜科、茄科等不同育苗形式的幼苗展开不同机型的研究,包括针对营养钵苗的茄科嫁接机、营养钵苗的瓜科嫁接机、穴盘苗的茄科嫁接机以及穴盘苗的瓜科嫁接机[24-26]。2012年,中国农业大学开发出单人操作的针对穴盘葫芦科苗的嫁接机[27]。该机砧穗木的上苗作业可由单人操作完成,其余作业皆由机械自动完成,由熟练的操作人员操作嫁接效率可达600株/h,成功率可达95%。随后,中国农业大学又于2013年开发出单人操作的针对营养钵葫芦科苗的嫁接机[24]。该机砧穗木的上苗作业可由单人操作完成,其余作业皆由机械自动完成,已嫁接完的营养钵苗由自动排列装置能够进行一定行列的排列摆放,操作便捷,熟练的操作人员操作其嫁接效率可达400株/h,成功率可达92%。
华南农业大学研制的2JC-600B型半自动嫁接机采用插接法进行自动嫁接作业,主要针对葫芦科幼苗的嫁接[28]。该机为半自动嫁接机,由2人操作,分别完成砧穗木幼苗的供苗作业,砧木子叶采用气吸式固定,并由相应的砧木打孔机构、穗木切削机构、砧穗木对接机构、自动卸苗机构完成嫁接作业的自动化,嫁接效率可达600株/h。
北京农业智能装备研究中心于2012年研制出采用双臂嫁接方式的蔬菜嫁接机[29]。该机与韩国GR-800CS型嫁接机类似,只是采用双臂,提高了作业效率,其作业效率可达800株/h,成功率为95%,可用于茄科及葫芦科苗的嫁接作业。
2 蔬菜自动化嫁接技术的研究对象和嫁接机分类
茄科蔬菜幼苗和葫芦科(瓜科)幼苗的自动化嫁接方法是当前各国自动化嫁接技术的主要研究对象。由于茄科苗和葫芦科苗在植物构造特性上的差异,采用的嫁接方法也不同[1]。茄科蔬菜幼苗嫁接主要有贴接法、针接法、套管法等方法,而葫芦科蔬菜幼苗嫁接主要有靠接法、插接法、贴接法等方法,如图2所示。
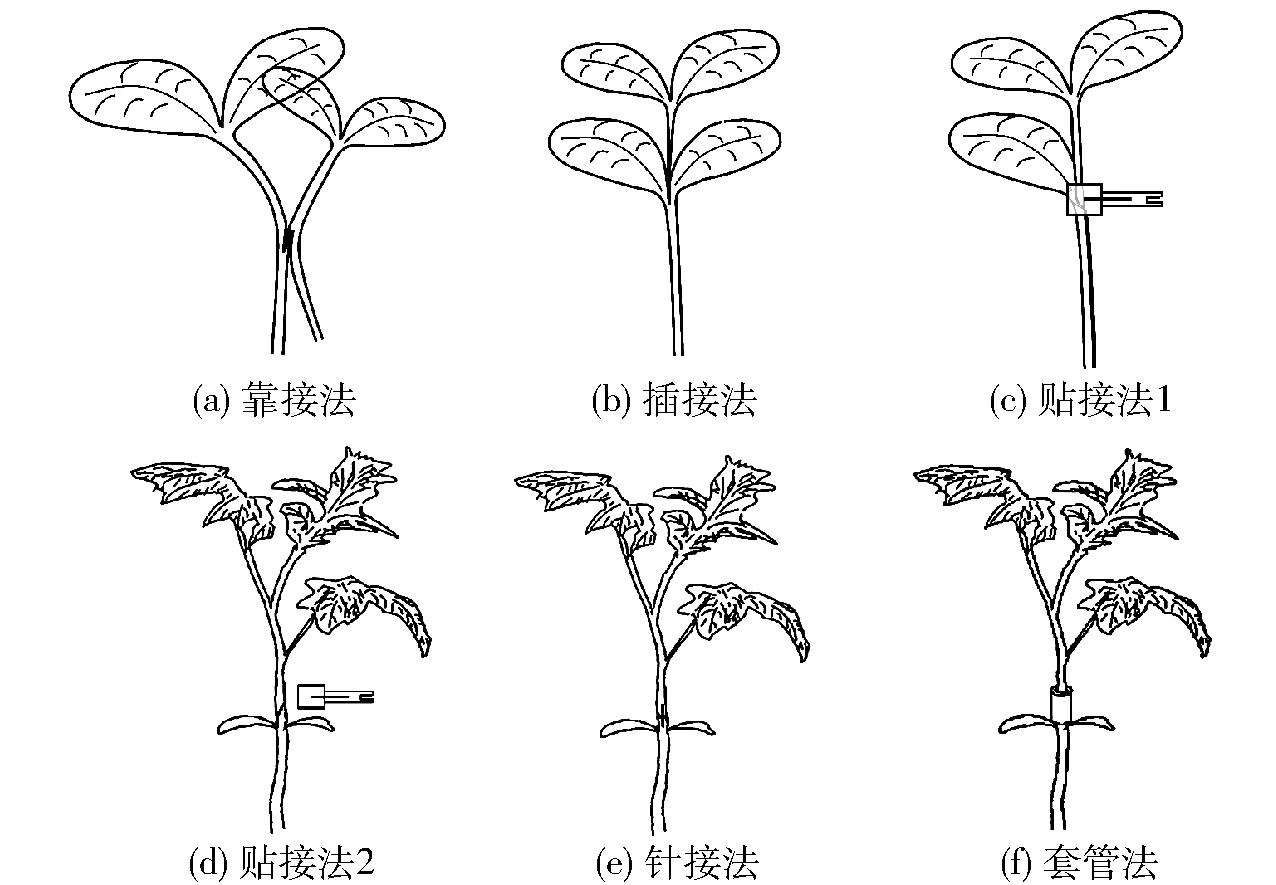
图2 各类嫁接方法示意图Fig.2 Grafting methods
靠接法是在砧木与穗木的胚轴上对应切成舌形,将两切口相互靠在一起,再用嫁接夹或其它固定物进行固定,如图2a所示;此方法由于愈合期保留穗木的根,成活率较高,但是作业比较繁琐,一般用于葫芦科幼苗的嫁接作业。插接法一般用于葫芦科幼苗的嫁接,嫁接过程中,在砧木上用打孔签打孔,将穗木去根并切成楔形,再插入砧木所打的孔中,如图2b所示;该方法作业简单,应用比较广泛。贴接法是将砧木与穗木都切削成斜面,随后将切削好的斜面贴靠一起,再用相应的嫁接夹进行固定,如图2c、2d所示;该方法可用于茄科和葫芦科蔬菜幼苗的嫁接作业,其中葫芦科幼苗嫁接作业中较常见的为单子叶贴接法,即将葫芦科砧木生长点处的一片子叶随同生长点进行切除,留下一片子叶,在生长点处形成斜面切口,与穗木的斜面切口进行贴合;而茄科幼苗嫁接采用贴接法时,一般保留砧木子叶,并在砧木子叶上方处进行斜面切削。针接法一般用于茄科幼苗的嫁接,嫁接过程中,采用针形物固定对接在一起的砧木和穗木,嫁接苗成活后不去除针形物,如图2e所示;该方法作业速度快,但针形物不能重复使用,成本相对较高。套管法也一般用于茄科幼苗的嫁接,是在贴接法的基础上演变而成,即将贴接法中的嫁接夹改为塑料或橡胶套管,如图2f所示。
目前自动嫁接机存在多种分类方式。
按自动化程度,可分为全自动嫁接机、半自动嫁接机、手动嫁接机。全自动嫁接机是指嫁接过程全程自动化,包括供苗、切削、嫁接、排苗等过程。半自动嫁接机是指部分嫁接过程的自动化,主要是嫁接动作的自动化实现,供苗或其他过程还需要人工辅助进行。而手动嫁接机是指嫁接动作需要手动完成,而其他辅助过程部分采用机械完成,如切削等过程。
按作业对象分,自动嫁接机可分为茄科幼苗自动嫁接机、葫芦科幼苗自动嫁接机以及茄科葫芦科通用自动嫁接机。由于茄科幼苗与葫芦科幼苗植物学特性的差异,所对应的嫁接机也有一定差别。
按嫁接实现方法分,自动嫁接机可分为贴接法自动嫁接机、针式自动嫁接机、套管式自动嫁接机、插接法自动嫁接机等。顾名思义,贴接法自动嫁接机主要采用嫁接夹作为固定物,针式自动嫁接机主要采用针形固定物,而套管式自动嫁接机则采用塑料或橡胶套管作为贴合固定物。
3 蔬菜自动化嫁接关键技术
自动嫁接技术关键在于解决嫁接过程中取苗、供苗、切削、嫁接、排苗等作业的自动化实现,国内外众多研究机构或企业普遍将以下几项核心关键技术作为蔬菜自动嫁接机的研究重点:幼苗机械化抓取技术、幼苗自动输送技术、砧/穗木切削技术、嫁接苗接合固定技术和自动嫁接系统控制技术。
3.1 幼苗机械化抓取技术
采用机械装置将蔬菜嫁接所需的砧木幼苗和穗木幼苗从各自所生长的培养容器中取出,在保证可靠夹持幼苗的过程中不损伤娇嫩幼苗是嫁接苗机械抓取技术的主要研究内容,并且,在某些场合还需在整个取苗过程中保持幼苗子叶统一朝向特定方向,以便于后续工位上的自动化操作。
井关农业株式会社研制的GRF800-U型葫芦科全自动嫁接机的自动取苗装置如图3所示[30]。
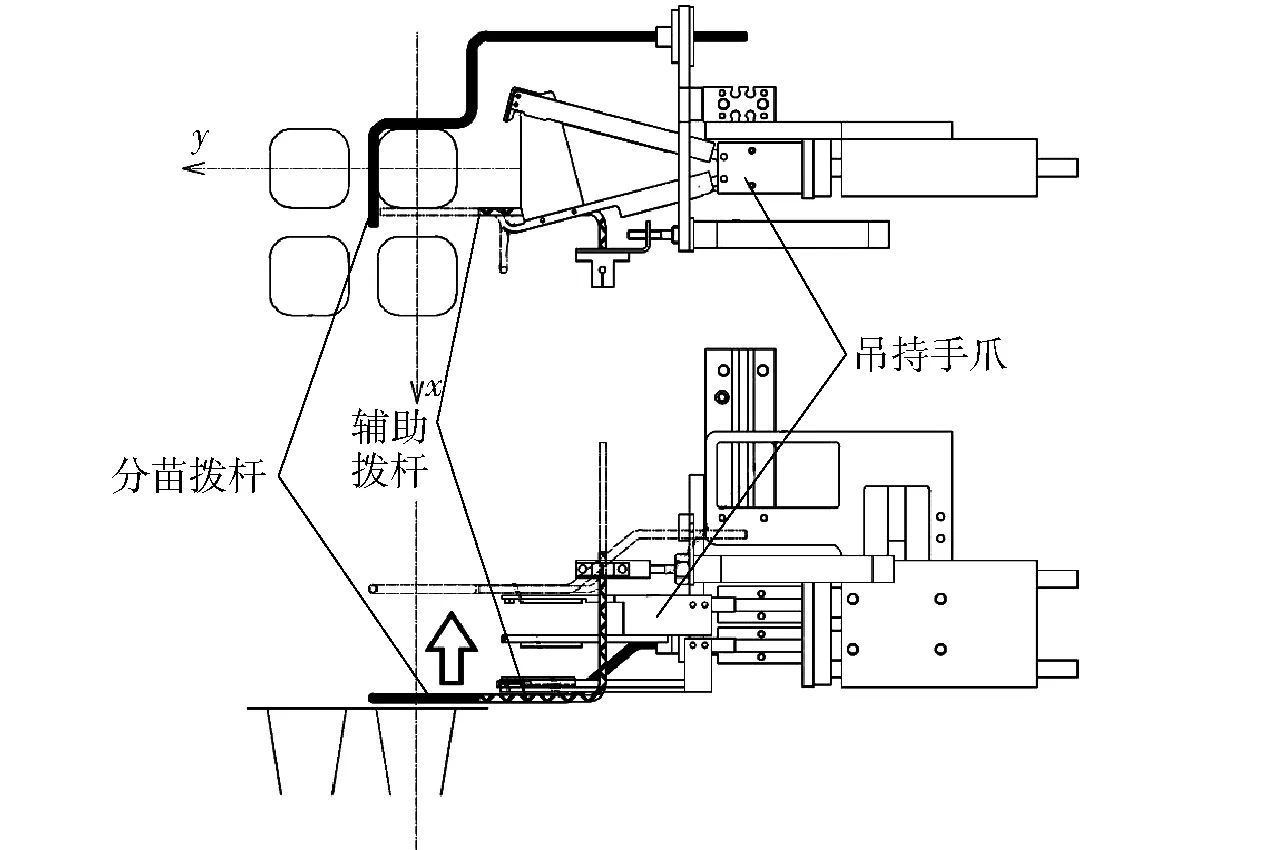
图3 GRF800-U型自动取苗装置Fig.3 Automatic seedlings taking mechanism of GRF800-U
该装置主要包括幼苗分苗扶持和切根取苗两部分。取苗时,首先借助由气缸带动的分苗拔杆和辅助拔杆,使幼苗可以以直立的状态进入到有效取苗区域,随之吊持手爪和切根手爪在气缸的带动下朝取苗区域前进,吊持手爪前进的同时将幼苗顶至穴盘边缘,然后闭合将幼苗夹持,切根手爪闭合将幼苗切下,完成自动取苗过程,再之后在输送机构的动作下将幼苗移送至其他机构进入之后的作业流程。该装置可将倒伏的幼苗进行直立扶持并拾取,取苗成功率高。
荷兰的ISO Graft 1200型蔬菜嫁接机中,砧木部分采用了自动化取苗设备[18],如图4所示。砧木置于一定规格的穴盘中,该穴盘底部开孔,工作时,由置于空盘底部的一系列取苗顶爪将相应的砧木细苗顶出,起到自动取苗的作用,后将取出的细苗悬置,等待机械臂将穗木幼苗搬运完成嫁接作业。而该机的穗木部分则采用人工上苗的方式进行作业。
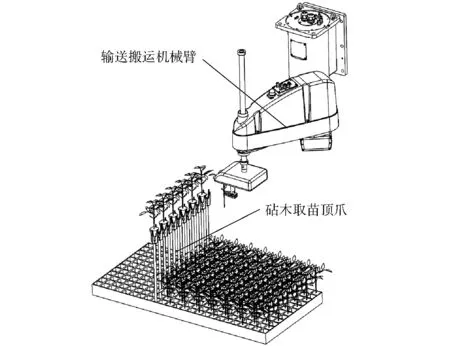
图4 ISO Graft 1200 型自动嫁接机自动取苗装置Fig.4 Automatic seedlings taking mechanism of ISO Graft 1200
为满足葫芦科嫁接苗夹持困难及夹持易损伤的问题,负压气吸技术被应用于自动取苗供苗装置[31-32],如图5所示。
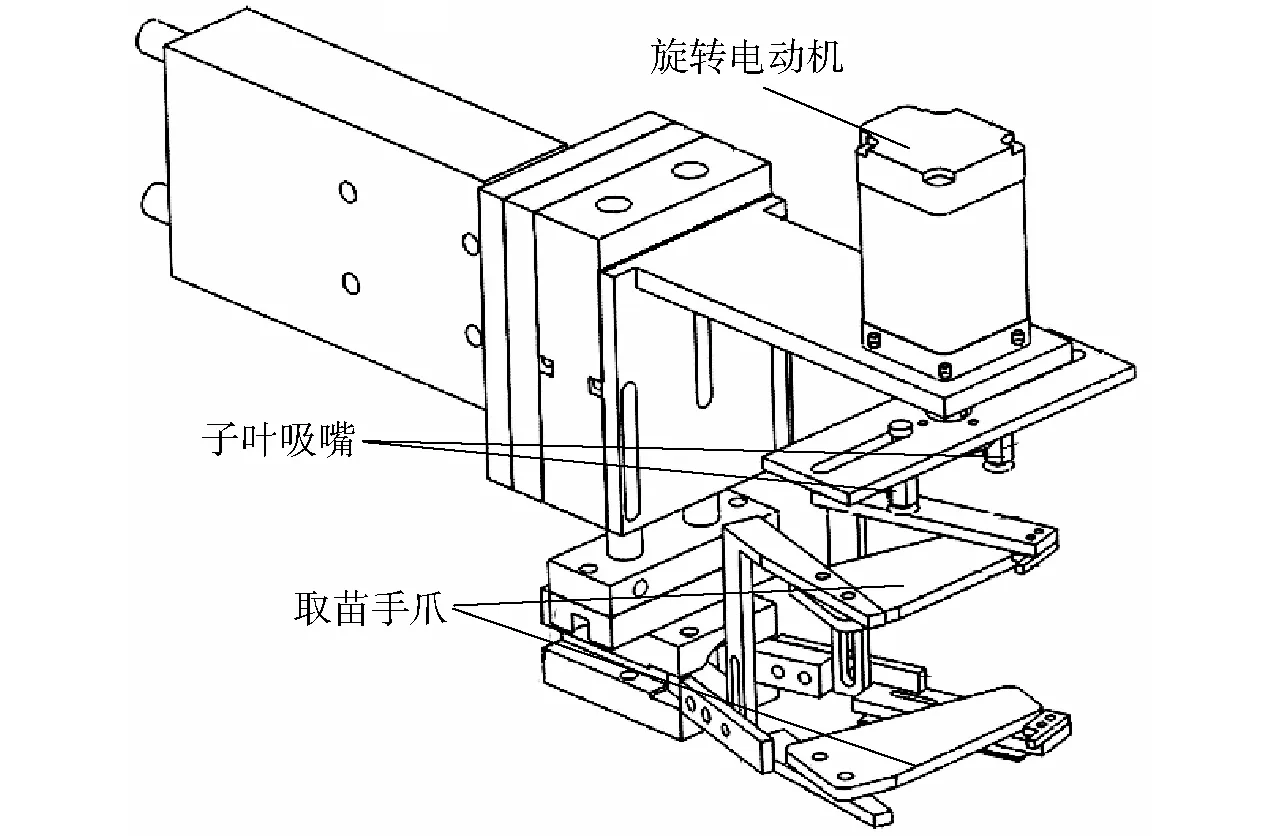
图5 负压气吸式自动取苗装置Fig.5 An automatic seedlings taking mechinism using negative pressure
该装置结合机器视觉与机电一体化技术,工作时取苗手爪将幼苗切断夹持后,机器视觉系统自动判别幼苗子叶展开方向,之后旋转电动机会根据差别的子叶展开方向旋转特定的角度,子叶吸嘴吸附两片子叶,后将其回旋至初始位置,达到幼苗子叶定向的效果。
3.2 幼苗自动输送技术
幼苗输送环节是将机械夹持装置连同幼苗以特定姿态准确输送到既定工位,以使后续的砧、穗木切削任务得以可靠进行。嫁接效率、整体机构尺寸等嫁接机的整体参数均受此关键技术的影响。总结目前各类机型,由于嫁接机空间结构的关系,普遍采用的是旋转气缸与直推气缸结合作为驱动的幼苗输送搬运方式[33-35],如图6所示[24]。
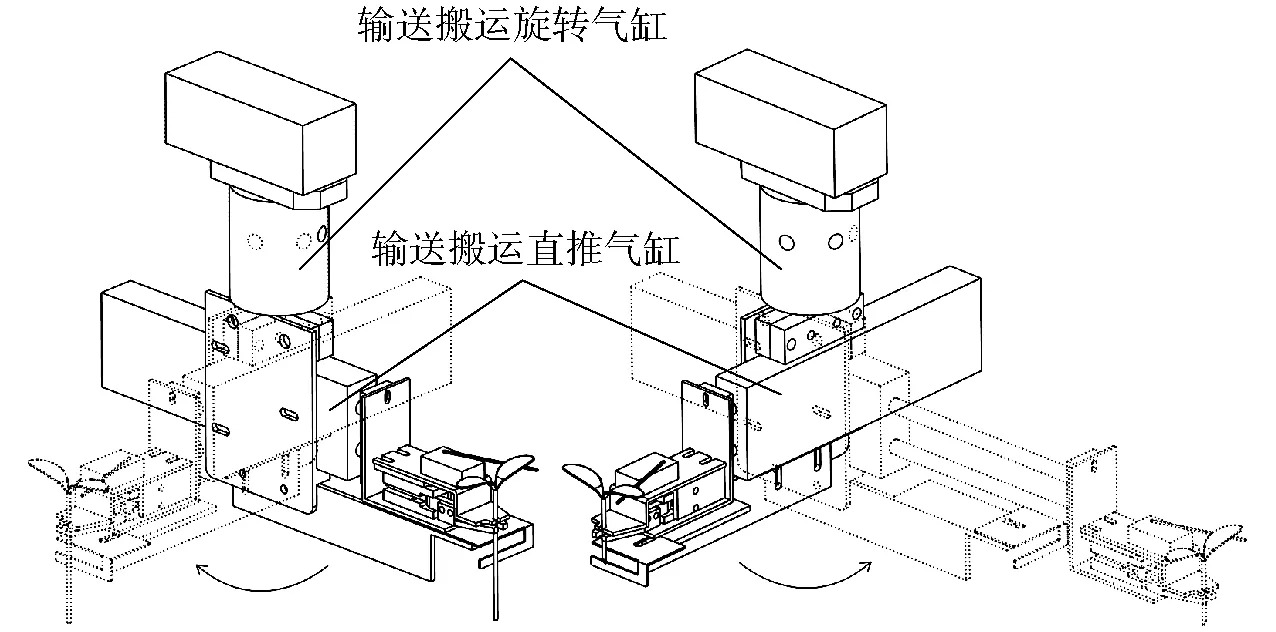
图6 幼苗输送搬运机构Fig.6 Seedling transporting mechanism
另外,也可直接采用现有的工业机械臂作为幼苗输送搬运装置,如荷兰ISO Graft 1200机型中,设计者采用12个供苗位的分度盘和4自由度的机械手配合完成瓜科苗木的搬运[18],作业精度较高,如图7所示。其中采用分度盘结构的输送方式也是较为高效的方式,国内也有不少研究机构采用此机构进行输送,以提高嫁接效率。
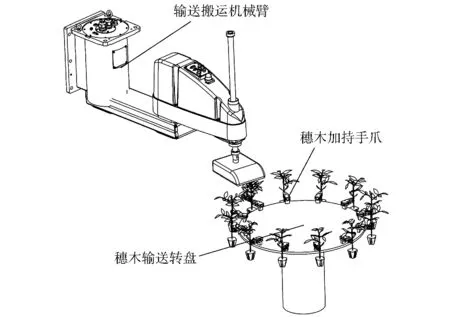
图7 ISO Graft 1200型自动嫁接机输送搬运机构Fig.7 Seedling transporting mechanism of ISO Graft 1200
日本、韩国、西班牙等国家采用的苗木输送方法与中国农业大学、西北农林科技大学以及东北农业大学等采用的方法相同,包括人工辅助送苗、输送带配合线性模组送苗、机械臂送苗等。尤其瓜科、茄科等自动化嫁接技术已经趋于成熟,出现了适合规模化生产的自动化嫁接作业的设备,能够实现苗木的自动输送、整形、拔取、辅助转向等过程[36-37]。而嫁接苗木输送的自动化,极大地提高了嫁接作业效率。
3.3 砧、穗木切削技术
砧、穗木切削是蔬菜嫁接过程中特有的一道工序,涉及切削速度、角度、入刃位置、切削刃的几何形状等多项因素;切削装置的设计直接影响嫁接的成功率、嫁接苗的成活率以及嫁接机的品质。因此,可靠切削技术也是自动嫁接关键技术的重中之重。目前采用较多的切削技术主要有旋转切削[38-40]、斜切和平切等方式[41-42]。
中国农业大学在20世纪90年代末设计了一种旋转切削机构[43],通过一个旋转气缸带动一个两端安装切刀的刀架同时完成对砧木和穗木的切削,经过计算机模拟及试验,确定了较为合适的旋转切削的切削半径和切削角度,其切削原理如图8所示,这种机构仅需一个旋转切削部件就可同时完成对砧木和穗木的切削,减少了工作部件和控制部件,整体结构紧凑。
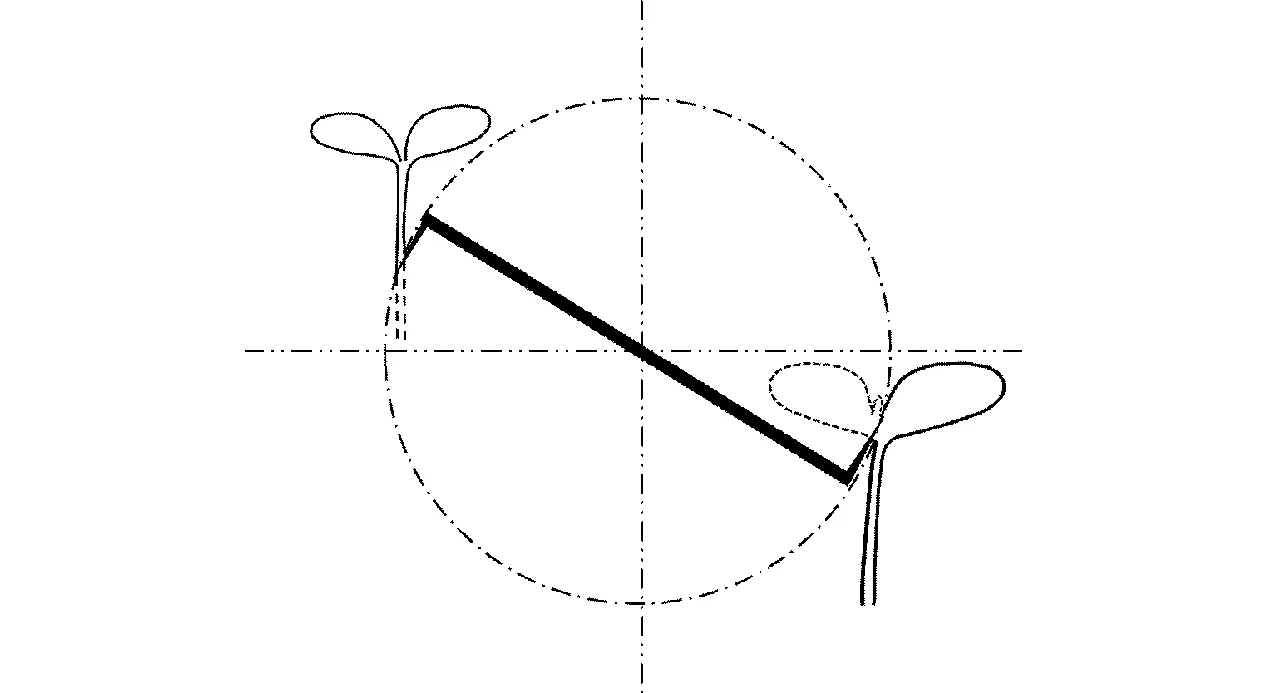
图8 旋转切削示意图Fig.8 Cycle cutting principle
除了旋转切削方式外,直切方式也得到较为普遍的使用,直切方式又分为斜切和平切两种。如图9所示是一种斜切的切削方式[24],切削时,切刀在切削气缸的带动下进行切削作业,幼苗置于切削支点处,切刀经过切削支点可将幼苗顺利切下,幼苗茎秆形成斜面切口。该切削方式简单方便,切削效果也较为理想,在日本、中国、韩国等不少国家研制的嫁接机中都有应用。
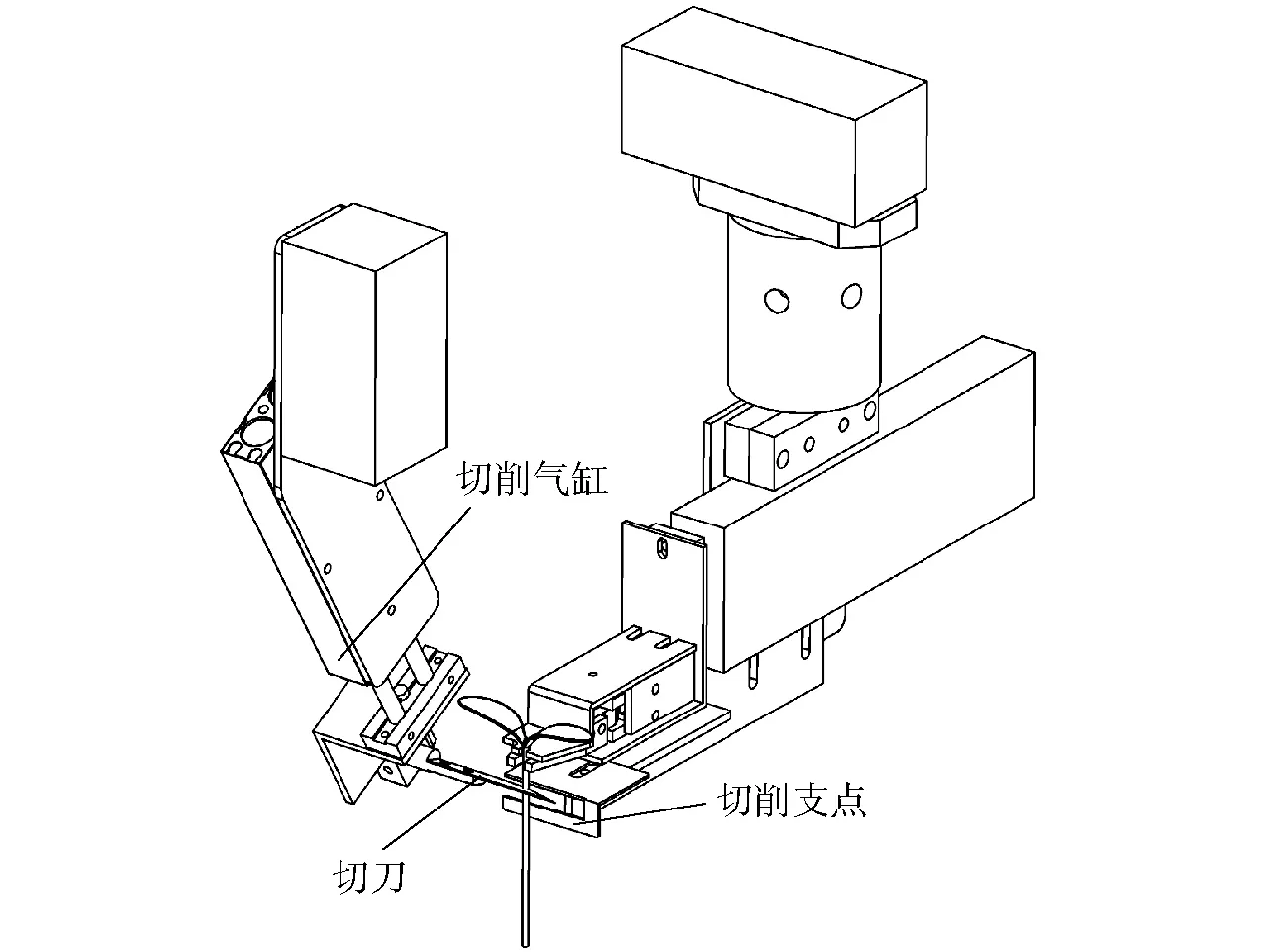
图9 斜切方式Fig.9 Slanting cutting
有些情况下,为了考虑嫁接对象的特殊性,以及嫁接机的结构布局,需要采用平切的切削方式。平切的原理与斜切类似,只是切削运动方向与幼苗茎秆呈垂直关系进行直线运动切削。该切削方式一般用于茄科幼苗平接法或劈接法的自动嫁接过程中,如荷兰的ISO Group生产的系列嫁接机都是采用平切法的切削方式。而华南农业大学研制的劈接式茄科嫁接机中也采用了平切的切削方式[44],其穗木采用V型平切切削方式,而砧木则采用了十字型平切切削方式。
3.4 砧、穗木接合固定技术
嫁接机的嫁接成功率体现在嫁接苗的成活率上,砧木、穗木接合情况直接决定着嫁接苗的成活率,砧、穗木接合固定技术也在整个自动化嫁接过程中占有关键地位。根据不同的嫁接方法,接合固定的方式不同,在自动嫁接领域,普遍采用的是贴接法、针接法、套管法等嫁接方法,各自采用的接合固定方式略有不同。
贴接式嫁接机砧木穗木接合后主要利用嫁接夹进行固定。为便于嫁接作业自动化,需要对嫁接夹按嫁接流程自动出夹、打开、闭合等工序。一般首先采用振动盘方式将嫁接夹进行定向排列,然后通过相关的送夹出夹装置进行出夹[45-46],图10是中国农业大学研制的蔬菜嫁接机使用的一种出夹装置[24]。工作时,送夹推杆在送夹气缸的推动下,将嫁接夹经由送夹滑槽推出,与此同时,两侧的压夹滑块推块在送夹气缸与连接件的带动下伸出,并在斜面配合的作用下,压夹滑块压向内侧,使嫁接夹张开;随后送夹气缸带动送夹推杆及压夹滑块推块退回, 嫁接夹在弹簧的作用下闭合并夹合砧穗木,2个压夹滑块也在嫁接夹回闭的过程中返回原位。当砧木和穗木都处理完毕被搬送至嫁接区域时,嫁接夹在自动送夹器的作用下推出并夹合砧穗木,完成嫁接作业。
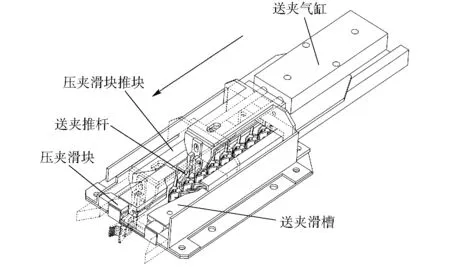
图10 自动送夹器Fig.10 Automatic clip sending mechanism
而对于针接法嫁接机来说,需要配套相应的出针装置。浙江大学研制了针对针接式自动嫁接机的出针装置和对接机构,对砧、穗木进行接合固定[47]。出针装置及原理如图11所示,该装置采用弹夹的原理,通过弹簧卡住插针,利用顶针机构沿导针槽推出插针。而出针之后,嫁接针已经插入砧木茎秆,与穗木接合时,需要将穗木插入针,此时需要相应的对接机构,在砧木夹持手部件中安装锥形定位销,相应地在接穗夹持手和出针装置的导针槽设置销孔,在接穗夹持收和出针装置通过直线导轨到达相对应位置,向下动作时,能够精确定位,这样就可完成针式嫁接的嫁接作业。
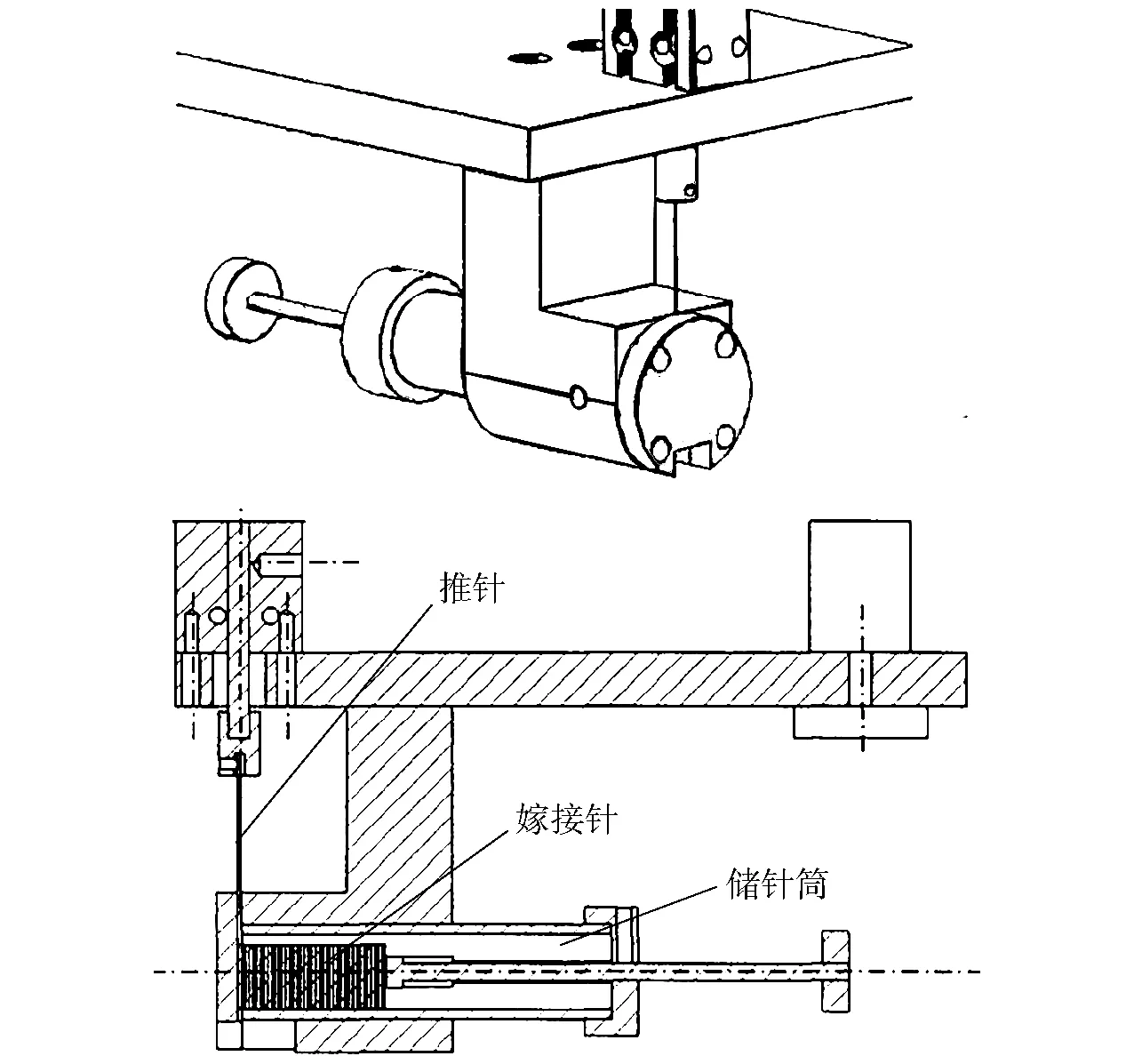
图11 出针装置Fig.11 An automatic pin sending mechanism
此外, 中国农业大学针对套管式嫁接机研制出相应的套管出套装置[48]。与嫁接夹类似,前期也是通过振动盘将套管进行定向有序排列,之后再利用相关的出套装置进套管的自动出套,自动出套装置如图12所示。该出套装置是针对专门一种套管工作的,工作时,在不同气夹的协同工作下,可将套管根据嫁接流程逐次送出,之后再配合其他装置完成嫁接作业。

图12 出套装置Fig.12 Automatic tube sending mechanism
3.5 自动嫁接系统控制技术
蔬菜的自动化嫁接作业涉及多工位、多执行机构的协调作业,整个嫁接过程对于机构运动的时间精度、空间精度和同步性均要求高,控制系统性能直接关系到自动嫁接系统的嫁接效率、嫁接成功率、整机鲁棒性等多项指标。目前,蔬菜自动嫁接控制系统通常是以单片机、PLC或PC机作为控制器,一方面获取包括光电开关、电磁开关、编码器以及摄像头等传感信息,另一方面通过继电器、驱动器、电磁阀等执行设备对执行机构(包括马达、气缸等)进行直接或间接控制,控制嫁接机系统各组成单元高效协调工作[49-53],其构成如图13所示。
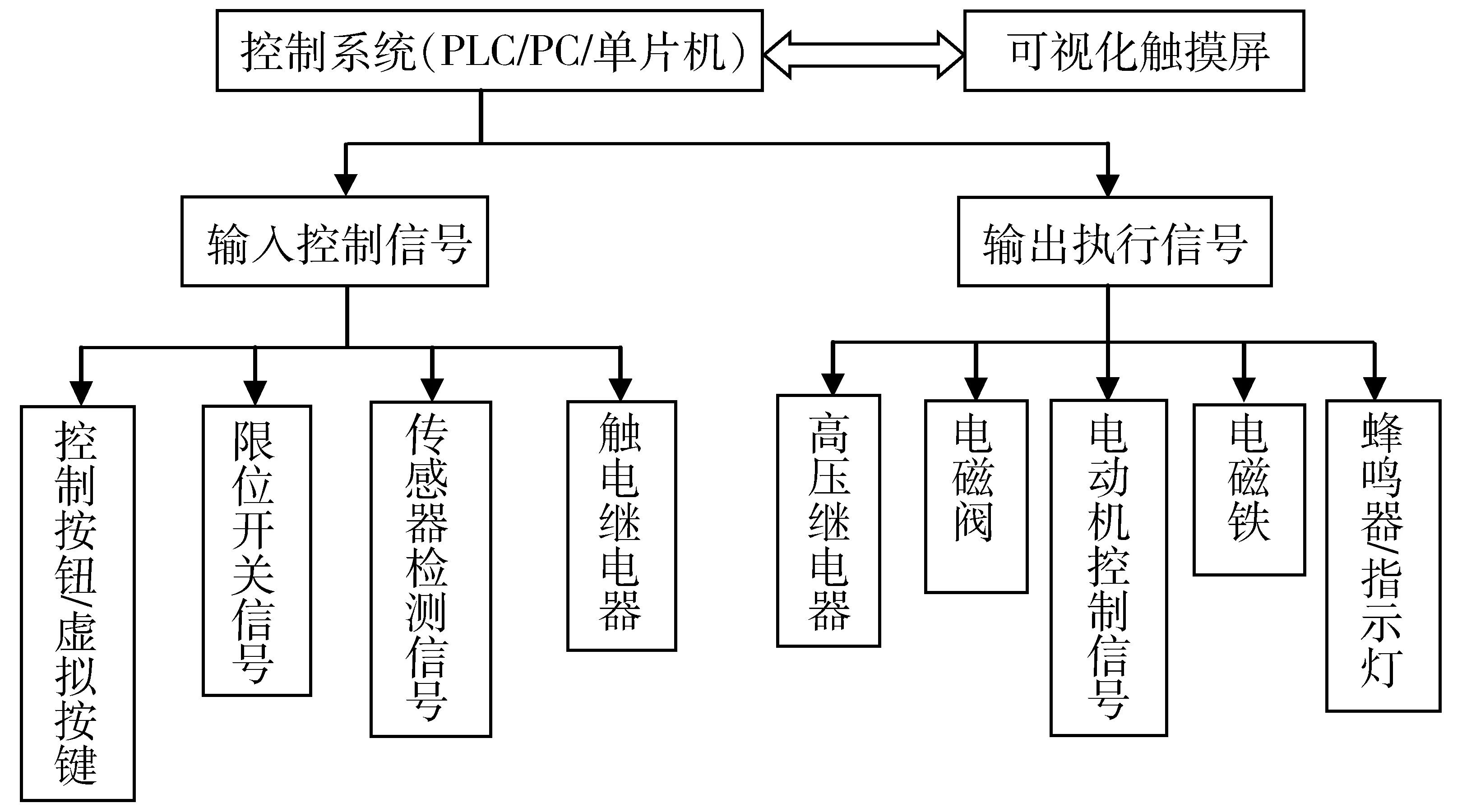
图13 典型的控制系统构成Fig.13 Common used control system
自动嫁接技术得到研究关注以来,其控制系统也经历了一个不断发展的历程,由最初的继电器控制型发展为现在的主要以PLC和单片机为控制单元的控制系统。由于PLC适用于复杂的工控环境[25,54-55],性能稳定,因此在设计研究机构较为复杂的嫁接机时多采用PLC作为控制单元;而对于一些小型的嫁接机控制系统,主要考虑到其价格低廉,功能集成度高,多选择单片机作为控制单元。随着控制技术的发展,为提高嫁接机的可操作性和智能化程度,越来越多的传感手段和操控手段被应用于控制系统,同时控制系统的集成程度也在提高:ISO Group Machinebouw公司通过对控制系统的高度集成,开发出了基于PLC的全自动嫁接机[56];华南农业大学率先将可视化触摸屏技术应用于嫁接机上[57-58],中国农业大学张铁中团队率先将图像识别技术应用于嫁接技术,将PLC及PC系统进行了整合,使两种类型的控制器协同作业,同时发挥了PLC的高可靠性和PC机的复杂数据处理能力[58]。未来实现嫁接机控制系统的功能复杂化,系统集成化,易操作等是市场所需。
4 蔬菜自动化嫁接辅助技术
除上述的各项关键技术外,某些生物生产自动化技术虽然不是实现蔬菜自动化嫁接的必要技术,但其能够促进蔬菜自动嫁接研究进程,并显著提高嫁接机的性能表现,其中,计算机视觉技术和定向播种技术是近年来研究关注较多的两项辅助技术。
4.1 嫁接苗木的计算机视觉检测技术
近年来,随着自动化嫁接技术的迅猛发展,为提高嫁接技术的精度和装备智能化程度,国内外在研究自动化嫁接技术中,已经将机器视觉技术用于处理嫁接苗木子叶展开的自动定向、生长点高度自动检测、蔬菜幼苗特性检测、分级处理、育苗穴盘定位等问题[59-65]。
相比于视觉图像处理,嫁接技术上应用视觉技术没有图像处理后输出的环节,只是将所采集的基本图像信息经过内部处理之后直接驱动执行机构。一般嫁接机器视觉系统由光源、光学镜头、摄像机、图像采集卡、图像处理系统、机器视觉软件模块、输入输出和控制执行机构组成[66-67]。
目前将机器视觉技术成熟应用到实际中的主要是孟加拉农业部、沈阳农业大学和日本京都大学联合研究的3D影像技术,它比较了插接法、斜切法、劈接法3种嫁接方法在作业后5~40 d对嫁接苗嫁接位置的愈合情况,得出嫁接苗在愈合期间插接法更有利于苗木的生长[68-70]。荷兰ISO Group Machinebouw公司在嫁接机中使用视觉技术实时检测瓜科接穗的生长状况,采集苗木数据信息。2011—2013年由日本京都大学和孟加拉农业大学研究了基于机器视觉的番茄苗分级的嫁接机器人[71],利用以发光二极管为背光的机器视觉系统采集幼苗图像,通过识别图像中子叶与茎干的节点,来分级判断苗的类别,试验成功率达到97%[65]。
在中国,2003年由中国农业大学率先将机器视觉技术应用于蔬菜嫁接机的砧木苗自动定位中,通过图像处理技术将营养钵体苗砧木子叶展开方向和高度生长点进行自动检测,应用PC机研发控制算法,通过执行机构对蔬菜嫁接苗砧木进行准确定位与切割,推动我国全自动嫁接技术的发展[50]。同样台湾的现代科学与工程协会研究了基于LabVIEW 7和视觉辅助系统的嫁接幼苗检测装置,通过该装置监测和分析番茄嫁接苗(接穗和砧木)的高度和宽度来分析幼苗的生长状况和生理特征,以便选取优质的嫁接苗木[72]。此外,沈阳农业大学采用机器视觉图像处理对砧木苗外形轮廓的识别来判断子叶生长点位置,通过驱动切苗系统对砧木苗准确劈切,提高切苗作业准确度,进而提高嫁接苗成活率;湖南农业大学以及西北农林大学等在嫁接技术中也使用了机器视觉技术来完成蔬菜苗砧木的自动定向问题[32,73];同时为满足蔬菜苗嫁接移栽,上海交通大学机器人研究所杨扬等也研发了基于视觉的育苗穴盘定位与检测系统,能够识别输送带上苗木穴盘空间信息,为嫁接苗木移栽提供了自动化的基础[74-76]。
4.2 面向蔬菜自动化嫁接的定向播种技术
某些自动化嫁接装备对苗木子叶的生长形态有一定要求,如瓜科全自动嫁接机作业过程中,为了使切削机构准确切除砧木苗的子叶,要保证将砧木子叶展开的方向朝向嫁接机切刀刀口,这对砧木子叶张开方向的一致性具有较高的要求,即需要砧木子叶的展开方向基本一致;而影响砧木子叶生长方向的关键因素是播种时种子在穴盘中的方向[77-79]。
中国农业大学设计了一种大粒种子定向播种机构,此机构采用弧线仿形结构,一套种盘搭配两套种子定向机构,实现了往复式无空行程播种,用于调整播种时种子长轴的排列方向, 以达到长出的幼苗叶片方向一致的目的[80]。华南农业大学开发了一种播种装置,基于直线振动器定向送种、气缸驱动种穴转向及负压针式播种技术,可实现大粒种子 45°定向精量播种[81]。西北农林科技大学设计了一种大粒种子调向排种机构[82],其主要由调向板、进种导向板和出种导向管构成,利用图像处理方法自动判断种子出芽点所在的方向,通过调向板正反转带动种子调向使发芽口朝下落入导向管,种子在导向管引导下落入穴孔,可实现对大粒种子长轴保持45°方向、种子发芽口朝向一致并位于穴孔中心位置定向定位排种。东北农业大学设计的大粒种子调向精量播种机构主要由种子定向送种盘、导向滑槽、整列定位种槽和吸嘴等组成,利用种盘的高频振动在特殊轨道上定向输送种子,使种子的长轴方向一致,一次循环动作可自动完成种子定向、种子定位、吸种、落种和穴盘的输送等工作过程[83]。
5 结论与讨论
(1)嫁接机自动化程度方面
现阶段的各种类型自动嫁接机基本上都是嫁接作业实现自动化,需要由操作工进行人工辅助操作,但人工辅助的操作过程也已经越来越薄弱。目前,嫁接过程中切削自动化已经普遍实现,自动取苗、供苗、嫁接苗自动栽植、后期管理等操作过程的自动化正在得到更多的研究关注,自动嫁接机器人技术正朝着其“自动化”的道路不断完善。随着未来农业从业人员的进一步减少,蔬菜自动嫁接机全自动化程度的实现可以解决劳动力减少和蔬菜需求量增加的矛盾,因此,自动化程度的提高同时也是嫁接机器人技术发展的内在需求。
(2)嫁接机的作业规模方面
不论是日本的全自动嫁接机系列,还是荷兰的自动嫁接生产线,如今蔬菜嫁接机器人基本上都是基于单株幼苗的嫁接过程进行自动化作业,这样的嫁接规模制约着嫁接机器人的嫁接效率,1 000株/h已接近单株嫁接机嫁接的效率瓶颈,若不从嫁接规模进行突破,嫁接效率也无法得到更大的突破。因此,需要另避蹊径,研究基于多株幼苗同时嫁接的自动嫁接系统,以在嫁接效率上取得突破。
(3)间接因素方面
现今蔬菜生产存在缺乏体系标准、生产分散等问题,导致嫁接机所需适应的苗木性状差异大,制约了蔬菜嫁接机的研究针对性及推广规模。农艺与装备同步发展是蔬菜自动化嫁接普及道路上的一条捷径,因此,现阶段迫切需要制定与蔬菜嫁接机相适应的蔬菜生产标准以及研究相应的农艺优化方法。
由于自动嫁接作业对象非结构性显著,有必要在自动控制算法和计算机视觉辅助嫁接方面充分利用当前人工智能领域的成熟方法,同时结合工况检测技术和互联网技术,充分利用嫁接育苗过程中产生的大数据,便于使自动嫁接装备更加智能化,从而提高嫁接机性能的稳定性、面向不同批次嫁接苗木的鲁棒性以及降低对操作人员的技术需求,以提升嫁接效率和嫁接质量。
1 储高峰. 茄科蔬菜自动嫁接技术的研究[D]. 北京:中国农业大学, 2002. CHU Gaofeng. Study on automatic grafting technology for solanaceous vegetable[D]. Beijing:China Agricultural University, 2002.(in Chinese)
2 辜松, 江林斌. 国内外蔬菜嫁接机的发展现状[J]. 东北农业大学学报, 2007, 38(6): 847-851. GU Song, JIANG Linbin. Development of domestic and foreign vegetable grafting robot[J]. Journal of Northeast Agricultural University, 2007, 38(6): 847-851.(in Chinese)
3 喻景权. “十一五”我国设施蔬菜生产和科技进展及其展望[J]. 中国蔬菜, 2011(2): 11-23. YU Jingquan. Progress in protected vegetable production and research during ‘ The Eleventh Five-year Plan’in China[J]. China Vegetables, 2011(2): 11-23.(in Chinese)
4 郑群, 宋维慧. 国内外蔬菜嫁接技术研究进展(上)[J]. 长江蔬菜, 2000(8): 1-4. ZHENG Qun, SONG Weihui. Research progress of vegetable technique in the world [J]. Journal of Changjiang Vegetables, 2000(8): 1-4. (in Chinese)
5 LEE J, KUBOTA C, TSAO S J, et al. Current status of vegetable grafting: diffusion, grafting techniques, automation[J]. Scientia Horticulturae, 2010, 127(2): 93-105.
6 TIAN S, DONGLEI X. Current status of grafting robot for vegetable[C]∥International Conference on Electronic & Mechanical Engineering and Information Technology, 2011, 4:1954-1957.
7 SUN Q, ZHAO D, WANG C, et al. Design of a sapling branch grafting robot[J]. Journal of Robotics, 2014: 1-9.
8 NISHIURA Y, MURASE H, HONAMI N. Development of a gripper for a plug-in grafting robot system[J]. Acta Horticulturae, 1996, 440:475-480.
9 NISHIURA Y, MURASE H, HONAMI N. Devlopment of plug-in grafting robotic system[J]. IEEE lnternatlonal Conference on Robotics and Automatlon, 1995, 3:2510-2517.
10 TIAN S, ASHRAF M A, KONDO N, et al. Optimization of machine vision for tomato grafting robot[J]. Sensor Letters, 2013, 11(6): 1190-1194.
11 COMBA L, GAY P, RICAUDA A D. Robot ensembles for grafting herbaceous crops[J]. Biosystems Engineering, 2016, 146: 227-239.
12 褚佳, 张铁中, 李军, 等. 断根嫁接苗自动栽植装置设计与试验[J/OL]. 农业机械学报, 2016, 47(10): 28-34. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20161004&flag=1.DOI:10.6041/j.issn.1000-1298.2016.10.004. CHU Jia, ZHANG Tiezhong, LI Jun, et al. Design and experiment of automatic planting device for root-cut grafted seedlings[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(10): 28-34.(in Chinese)
13 大越崇博. ウリ科用全自動接ぎ木ロボットの開発[J]. 農業機械学会誌, 2011, 73(1): 19-21.
14 大越崇博,小林研. ウリ科接ぎ木装置用自動給苗装置の開発(第1報─ ─台木用自動給苗装置の性能評価)[J]. 農業機械学会誌, 2013, 75(2): 100-107.
15 ISEKI CO., LTD.接ぎ木ロボット[S/OL]. http:∥www.iseki.co.jp/products/nougyou/tugiki/, 2016.
16 EC21 Inc. Supreme precision grafting robot[S/OL]. http:∥helpersys.en.ec21.com/Grafting_Robot--2012260_2012262.html, 2016.
17 ISO Group, Inc. ISO Graft 1000[S/OL]. https:∥www.youtube.com/watch?v=a1eXOfLTHyY, 2016.
18 ISO Group, Inc. ISO Graft 1200[S/OL]. http:∥www.isogroepmachinebouw.nl/nl/isograft1200.html, 2016.
19 ISO Group, Inc. ISO Graft 1100[S/OL]. http:∥www.isogroepmachinebouw.nl/nl/isograft1100.html, 2016.
20 Conic System Inc. EMP-300[S/OL]. http:∥www.conic-system.com/wp/gallery/51-2?lang=en, 2016.
21 Atlantic Man.(S.R.L.). Semi-automatic grafting machine “GR 300/3”[S/OL]. http:∥tech.atlanticgroup.it/en/products/semi-automatic-grafting-machine-gr-3003-patented, 2016.
22 张铁中. 2JSZ-600 型蔬菜自动嫁接机[J]. 农村百事通, 2000(21): 42.
23 杨丽, 刘长青, 张铁中. 双臂蔬菜嫁接机设计与试验[J]. 农业机械学报, 2009, 40(9): 175-181. YANG Li, LIU Changqing, ZHANG Tiezhong. Design and experiment of vegetable grafting machine with double manipulators[J]. Transactions of the Chinese Society for Agricultural Machinery, 2009, 40(9): 175-181.(in Chinese)
24 褚佳, 张铁中. 葫芦科营养钵苗单人操作嫁接机器人设计与试验[J/OL]. 农业机械学报, 2014, 45(增刊):259-264. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2014s142&flag=1. DOI:10.6041/j.issn.1000-1298.2014.S0.042. CHU Jia, ZHANG Tiezhong. Design and experiment of vegetable grafting robot operated by one-person for cucurbitaceous seedlings cultivated in humus pots[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2014, 45(Supp.): 259-264.(in Chinese)
25 赵颖, 孙群, 张铁中. 营养钵茄苗嫁接机器人机械系统设计与实验[J]. 农业机械学报, 2007,38(9): 94-97. ZHAO Ying, SUN Qun, ZHANG Tiezhong. Mechanical system design of grafting robot for nutritional bowl eggplant seedlings[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007, 38(9): 94-97. (in Chinese)
26 赵颖, 孙群, 张铁中. 营养钵茄苗嫁接机器人控制系统设计[J]. 农业机械学报, 2007,38(12): 225-228. ZHAO Ying,SUN Qun,ZHANG Tiezhong. Mechanical system design of grafting robot for nutritional bowl eggplant seedlings[J]. Transactions of the Chinese Society for Agricultural Machinery, 2007,38(12):225-228.(in Chinese)
27 中国农业大学. 一种自动嫁接机:中国, CN201210342667.0[P]. 2012-12-19.
28 杨艳丽, 李恺, 初麒, 等. 斜插式嫁接机砧木子叶气吸夹结构及作业参数优化试验[J]. 农业工程学报, 2014, 30(4): 25-31. YANG Yanli, LI Kai, CHU Qi, et al. Air suction clamp structure of rootstock cotyledons for inclined inserted grafting machine and its optimized experiment of operation parameters[J]. Transactions of the CSAE, 2014, 30(4): 25-31. (in Chinese)
29 姜凯, 郑文刚, 张骞,等. 蔬菜嫁接机器人研制与试验[J]. 农业工程学报, 2012, 28(4): 8-14. JIANG Kai, ZHENG Wen’gang, ZHANG Qian, et al. Development and experiment of vegetable grafting robot[J]. Transactions of the CSAE, 2012, 28(4): 8-14.(in Chinese)
30 小林研, 藤井桃子, 大越崇博. ウリ科用接ぎ木装置に適応する自動給苗機構の開発[J]. 農業機械学会誌, 2011, 73(1):57-64.
31 楼建忠, 李建平, 朱盘安, 等. 斜插式蔬菜嫁接机穗木气吸吸头优化设计[J/OL]. 农业机械学报, 2013, 34(2): 63-68. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130213&flag=1. DOI:10.6041/j.issn.1000-1298.2013.02.013. LOU Jianzhong, LI Jianping, ZHU Pan’an, et al. Optimization of suction head of scion clamping mechanism for vegetable grafting machine[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 34(2): 63-68. (in Chinese)
32 田玉凤. 瓜科嫁接机自动供苗系统关键技术的研究[D]. 杨凌:西北农林科技大学, 2014. TIAN Yufeng. Key technonlogles of automatc seedling feeding system for cucurbitaceous grafting machine[D]. Yangling: Northwest A&F University, 2014. (in Chinese)
33 王哲禄. 蔬菜嫁接机器人自动上苗装置的设计与试验研究[D]. 杭州:浙江理工大学, 2013. WANG Zhelu. Design and expeimental study on the equipment of feed seeding to the grafting robot for fruits and vegetables[D]. Hangzhou:Zhejiang Sci-Tech University, 2013. (in Chinese)
34 刘长青. 蔬菜嫁接机器人自动输送系统的研究[D]. 北京:中国农业大学, 2000. LIU Changqing. Study on the automatic feeding system of the grafting robot for vegetables[D]. Beijing:China Agricultural University, 2000. (in Chinese)
35 杨蒙爱. 瓜类嫁接机配对上苗关键技术研究[D]. 杭州:浙江理工大学, 2014. YANG Meng’ai. Study on key of technology of taking seeding of melonwith matching to the grafting robot[D]. Hangzhou:Zhejiang Sci-Tech University, 2014. (in Chinese)
36 余伟芬. 自动供苗装置关键技术的研究[D]. 杨凌:西北农林科技大学, 2015. YU Weifen. Key technologies research of automatic seeding offering machine[D]. Yangling: Northwest A&F University, 2015. (in Chinese)
37 王侨. 穴盘苗自动取苗机构控制系统研究[D].石河子:石河子大学, 2013. WANG Qiao. Research on the control system on automatic pick-up seedling mechanism[D]. Shihezi: Shihezi University, 2013. (in Chinese)
38 李明, 戴思慧, 汤楚宙, 等. 苗木嫁接机器人切削机构模拟试验[J]. 农业工程学报, 2008, 24(6):129-132. LI Ming, DAI Sihui, TANG Chuzhou, et al. Simulation test on plantlet-cutting mechanism of grafting robot[J]. Transactions of the CSAE, 2008, 24(6) :129-132. (in Chinese)
39 姜凯, 郑文刚, 张骞, 等. 蔬菜嫁接机器人切削装置设计与试验[J]. 农机化研究, 2012,34(2): 76-79. JIANG Kai, ZHENG Wen’gang, ZHANG Qian, et al. Design and experiment of grafting robot cutting device[J]. Journal of Agricultural Mechanization Research, 2012,34(2): 76-79. (in Chinese)
40 田素博, 宋传程 ,董嵩, 等. 甜瓜贴接嫁接机切削装置工作参数优化与试验[J]. 农业工程学报, 2016, 32(22): 86-92. TIAN Subo, SONG Chuancheng, DONG Song, et al. Parameter optimization and experiment for cutting device of muskmelon grafting machine[J]. Transactions of the CSAE, 2016, 32(22): 86-92. (in Chinese)
41 刘宝伟, 辜松. 2JC-500型自动嫁接机接穗夹持与切削机构[J]. 农机化研究, 2008,30(2): 119-120. LIU Baowei, GU Song. Clapping and cutting mechanism of scion for 2JC-500 grafting machine[J]. Journal of Agricultural Mechanization Research, 2008,30(2): 119-120. (in Chinese)
42 赵燕平, 张铁中, 王红英. 树苗自动嫁接机砧木切削机构研究[J]. 农业工程学报, 2008,24(9): 79-83. ZHAO Yanping, ZHANG Tiezhong, WANG Hongying. Cutting mechanism of root parental stock in automatic sapling grafting machine[J]. Transactions of the CSAE, 2008,24(9): 79-83. (in Chinese)
43 徐丽明, 张铁中, 刘长青. 蔬菜自动嫁接机器人系统——旋转切削机构的设计[J]. 中国农业大学学报, 2000,5(2): 34-36. XU Liming, ZHANG Tiezhong, LIU Changqing. Study on robot system for auto-grafting of vegetable—design of the rotary cutting mechanism[J]. Journal of China Agricutural University, 2000, 5(2): 34-36. (in Chinese)
44 刘凯, 杨艳丽, 李恺, 等. 流水线式茄科嫁接机砧木切削机构的试验研究[J]. 农业工程学报, 2012, 28(16): 23-28. LIU Kai, YANG Yanli, LI Kai, et al. Experimental study on rootstock cutting mechanism of pipeline grafting machine for solanaceae[J]. Transactions of the CSAE, 2012, 28(16): 23-28. (in Chinese)
45 姜凯, 张骞, 王秀, 等. 嫁接夹自动排序供夹装置设计[J]. 农业机械学报, 2012, 43(增刊): 256-261. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=2012s53&flag=1. DOI:10.6041/j.issn.1000-1298.2012.S0.053. JIANG Kai, ZHANG Qian, WANG Xiu, et al. Design for automatic sequencing and supplying device for grafting clips[J]. Transactions of the Chinese Society for Agricultural Machinery, 2012, 43(Supp.): 256-261. (in Chinese)
46 田素博, 杨继峰, 王瑞丽, 等. 蔬菜嫁接机嫁接夹振动排序装置工作参数优化试验[J]. 农业工程学报, 2014,30(6): 9-16. TIAN Subo, YANG Jifeng, Wang Ruili, et al. Optimization experiment of operating parameters on vibration sorting-clip device for vegetable grafting machine[J]. Transactions of the CSAE, 2014, 30(6): 9-16. (in Chinese)
47 陈正贝. 基于斜接面接合的茄科蔬菜针接式嫁接机关键技术研究与优化[D]. 杭州:浙江大学, 2014. CHEN Zhengbei. The key technology study and parameters optimization of pin-connected solanaceae vefgetable grafting robot based on slaned cutting surface[D]. Hangzhou:Zhejiang University, 2014. (in Chinese)
48 褚佳, 张铁中, 张立博,等. 套管式蔬菜自动嫁接机出套装置设计与试验[J/OL]. 农业机械学报, 2016, 47(2): 64-70. http:∥www.j-csam.org/jcsam/ch/index.aspx=doi:10.6041/j.issn.10001298.2016.02.009. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160209&flag=1. DOI:10.6041/j.issn.1000-1298.2016.02.009. CHU Jia, ZHANG Tiezhong, ZHANG Libo, et al. Design and experiment of tube-outputting device for vegetable grafting machine using tube-grafting method[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(2): 64-70. (in Chinese)
49 尹权, 张铁中, 李军, 等. 基于PLC的一种茄科整排自动嫁接机控制系统设计[J]. 农机化研究, 2017,39(5): 75-83. YIN Quan, ZHANG Tiezhong, LI Jun, et al. PLC control system design for a kind of solanaceae whole row of automatic grafting machine[J]. Journal of Agricultural Mechanization Research, 2017,39(5): 75-83. (in Chinese)
50 项伟灿, 张路, 武传宇, 等. 直插式自动嫁接机控制系统的设计[J]. 机电工程, 2009, 26(10): 52-53. XIANG Weican, ZHANG Lu, WU Chuanyu, et al. Design of control system to direct insert type automatic grafting machine[J]. Mechanical & Electrical Engineering Magazine, 2009, 26(10): 52-53. (in Chinese)
51 罗辉, 张铁中, 刘旭东. 自动嫁接机运动控制仿真系统设计[J]. 农业机械学报, 2005, 36(5): 90-92. LUO Hui, ZHANG Tiezhong, LIU Xudong. Design of a movement controlling simulation system for vgetable graf ting robot[J]. Transactions of the Chinese Society for Agricultural Machinery, 2005, 36(5): 90-92. (in Chinese)
52 冯青春, 郑文刚, 吴莹, 等. 基于PLC自动嫁接机控制系统设计[J]. 中国农机化, 2012(1): 159-161. FENG Qingchun, ZHENG Wen’gang, WU Ying, et al. PLC control system design for automatic grafting machine[J]. Chinese Agricultural Mechanization, 2012(1): 159-161. (in Chinese)
53 闫俊杰, 张铁中. 基于双CPU的营养钵苗嫁接机器人控制系统[J]. 中国农业大学学报, 2004,9(5): 59-61. YAN Junjie, ZHANG Tiezhong. Control system of grafting robot for nutritional bowl based on double CPU[J]. Journal of China Agricultural University, 2004, 9(5): 59-61. (in Chinese)
54 赵金英, 张铁中. PLC在自动嫁接机控制系统中的应用[J]. 中国农业大学学报, 2004, 9(6): 53-55. ZHAO Jinying, ZHANG Tiezhong. Application of PLC to control system of automatic grafting machine[J]. Journal of China Agricultural University, 2004,9(6): 53-55. (in Chinese)
55 王守志, 韩金玉. 精密播种机PLC控制系统研究[J]. 现代化农业, 2007(4): 37-39.
56 辜松. 蔬菜嫁接机的发展现状[J]. 农业工程技术:温室园艺, 2009,31(12): 26-30.
57 廖望, 辜松. 触摸屏控制技术在全自动瓜科嫁接机上的应用[J]. 农机化研究, 2009,31(12): 181-182. LIAO Wang, GU Song. An application of touch screen for automatic grafting machine[J]. Journal of Agricultural Mechanization Research, 2009,31(12): 181-182. (in Chinese)
58 贡治华. 基于图像处理技术的蔬菜嫁接机砧木自动定位系统研究[D]. 北京:中国农业大学, 2003.
59 NISHIURA Y, YASUKURI Y, HANANURA J. Robotics and system technologies for raising and grafting seedlings[J]. IFAC Proceedings Volumes, 2013, 46(4):336-339.
60 WANG Y, TIAN S B, QIU L C. Application of machine vision in grading and identification of grafting seedlings[J]. Advanced Materials Research, 2011, 418-420: 1705-1708.
61 贺磊盈, 蔡丽苑, 武传宇. 基于机器视觉的幼苗自动嫁接参数提取[J]. 农业工程学报, 2013, 29(24): 190-195. HE Leiying, CAI Liyuan, WU Chuanyu. Vision-based parameters extraction of seedlings for grafting robot[J]. Transactions of the CSAE, 2013, 29(24): 190-195. (in Chinese)
62 张雷, 田素博. 甜瓜嫁接机嫁接苗接缝视觉识别系统研究[J]. 农机化研究, 2016,38(3): 86-90. ZHANG Lei, TIAN Subo. Visual recognition system on gap of grafting seedlings for muskmelon grafting machine[J]. Journal of Agricultural Mechanization Research, 2016,38(3): 86-90.(in Chinese)
63 张雷, 贺虎, 武传宇. 蔬菜嫁接机器人嫁接苗特征参数的视觉测量方法[J]. 农业工程学报, 2015, 31(9): 32-38. ZHANG Lei, HE Hu, WU Chuanyu. Vision method for measuring grafted seedling properties of vegetable grafted robot[J]. Transactions of the CSAE, 2015,31(9): 32-38. (in Chinese)
64 ASHRAF M A, KONDO N, SHIIGI T. Use of machine vision to sort tomato seedlings for grafting robot[J]. Engineering in Agriculture Environment & Food, 2011, 4(4):119-125.
65 TIAN S, LI L. Application of machine vision in seedling automatic grafting robot[C]∥2011 4th International Congress on Image and Signal Processing, 2011, 3:1405-1408.
66 晏祖根, 李明, 徐克非, 等. 高速机器人分拣系统机器视觉技术的研究[J]. 包装与食品机械, 2014, 32(1): 28-31. YAN Zugen, LI Ming, XU Kefei, et al. High speed robot auto-sorting system based on machine vision[J]. Packaging and Food Machinery,2014, 32(1): 28-31. (in Chinese)
67 张五一, 赵强松, 王东云. 机器视觉的现状及发展趋势[J]. 中原工学院学报, 2008, 19(1): 9-12. ZHANG Wuyi, ZHAO Qiangsong, Wang Dongyun. Actualities and developing trend of machine vision[J]. Journal of Zhongyuan University of Technology, 2008, 19(1): 9-12. (in Chinese)
68 TEN T, NISHIURA Y, MURASE H, et al. Machine vision system for measurement of the rate of joining of grafted seedlings[J]. International Symposium on Plant Production in Closed Ecosystems, 1997: 425-429.
69 AI-MUIA Y A, AHMEDM, JAYASURIYA H. International conerence on agricultural engineering: new technologies for sustainable agricultural production and food security[M].ISHS, 2014.
70 NISHIURA Y, YASUKURI Y, HANAMURA J. Robotics and system technologies for raising and grafting seedlings[C]∥Sakai, Japan: IFAC Secretariat, 2013.
71 TIAN S, ASHRAF M A, KONDO N, et al. Optimization of machine vision for tomato grafting robot[J]. Sensor Letters, 2013,11(6): 1190-1194.
72 CHU Y C, CHANG M Y, WU G J, et al. Development of an automatic outward-feature properties measurement system for grafted tomato seedlings[J]. Applied Engineering in Agriculture, 2006, 24(1): 101-113.
73 李中秋. 基于机器视觉的蔬菜嫁接机砧木自动定位切削系统研究[D]. 长沙:湖南农业大学, 2007. LI Zhongqiu. Study of automatic orientation cutting system of stock in vegetable automation grafting based on machine vision[D]. Changsha:Hunan Agricultural University, 2007. (in Chinese)
74 谭明豪, 曹其新, 邱强, 等.基于机器视觉的嫁接苗移栽实时定位研究[J/OL]. 农业机械学报, 2016, 47(2):59-63. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20160208&flag=1. DOI:10.6041/j.issn.1000-1298.2016.02.008. TAN Minghao, CAO Qixin, QIU Qiang, et al. Real-time localization research of transplanting based on machine vision[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2016, 47(2): 59-63. (in Chinese)
75 杨扬, 曹其新, 盛国栋, 等.基于机器视觉的育苗穴盘定位与检测系统[J/OL]. 农业机械学报, 2013, 44(6): 232-235. http:∥www.j-csam.org/jcsam/ch/reader/view_abstract.aspx?file_no=20130640&flag=1. DOI:10.6041/j.issn.1000-1298.2013.06.040. YANG Yang, CAO Qixin, SHENG Guodong, et al. Plug tray localization and detection system based on machine vision[J/OL]. Transactions of the Chinese Society for Agricultural Machinery, 2013, 44(6): 232-235. (in Chinese)
76 ASHRAF M A, KONDO N, SHIIGI T. Use of machine vision to sort tomato seedlings for grafting robot[J]. Engineering in Agriculture, Environment and Food, 2011, 4(4): 119-125.
77 辜松. 蔬菜工厂化嫁接育苗生产装备与技术[M]. 北京: 中国农业出版社, 2006.
78 崔永杰, 丁宪, 李平平, 等. 基于图像处理的大粒种子方向的判断方法[J]. 农机化研究, 2012,34(11): 125-128. CUI Yongjie, DING Xian, LI Pingping, et al. Judgment of large seeds direction based on image processing[J]. Journal of Agricultural Mechanization Research, 2012,34(11): 125-128. (in Chinese)
79 陈同, 刘海彬, 隽杰, 等.大粒种子调向排种机构的试验研究[J]. 农机化研究, 2015,37(10): 158-162. CHEN Tong, LIU Haibin, JUN Jie, et al. Experimental study on adjustment direction and seeding mechanism for large cucurbitaceous seeds[J]. Journal of Agricultural Mechanization Research, 2015,37(10): 158-162. (in Chinese)
80 孔艳山, 张铁中, 褚佳, 等. 嫁接用大粒种子定向播种机构的设计研究[J]. 农机化研究, 2017,39(4): 73-77. KONG Yanshan, ZHANG Tiezhong, CHU Jia, et al. Research design on a directional seeding mechanism for big seeds of grafting[J]. Journal of Agricultural Mechanization Research, 2017,39(4): 73-77. (in Chinese)
81 杨艳丽, 辜松, 李恺, 等. 大粒种子定向精量播种装置参数优化试验[J]. 农业工程学报, 2013, 29(13): 15-22. YANG Yanli, GU Song, LI Kai, et al. Parameters optimization of directing precision seeder for large cucurbitaceous seeds[J]. Transactions of the CSAE, 2013, 29(13): 15-22. (in Chinese)
82 陈同. 大粒种子定向定位精量播种装置关键技术的研究[D]. 杨凌:西北农林科技大学, 2015. CHEN Tong. Study on seed orientation positioning precision seeding device of key technology[D]. Yangling: Northwest A&F University, 2015. (in Chinese)
83 杨艳丽, 辜松, 潘汝琼, 等. 大粒种子调向精量播种机构的设计[J]. 农机化研究, 2009,31(12): 68-70. YANG Yanli,GU Song,PAN Ruqiong, et al. Design of the directional precision seeding mechanism for big seeds[J]. Journal of Agricultural Mechanization Research, 2009,31(12): 68-70. (in Chinese)
Development Status and Analysis of Automatic Grafting Technology for Vegetables
ZHANG Kailiang CHU Jia ZHANG Tiezhong YIN Quan KONG Yanshan LIU Zhan
(CollegeofEngineering,ChinaAgriculturalUniversity,Beijing100083,China)
For grafting brings various advantages to plants, such as enhancing the disease resistance, speeding the growth, increasing production of per unit and reducing chemical application, it is a crucial step in large-scale vegetable production. Furthermore, automatic grafting by machine can effectively improve the survival rate of grafted seedlings and the working efficiency, which makes this kind of technology a rigid demand in vegetables’ commercial production. At present, global research within the field of automatic grafting and related robotic technologies has been carried out for years. The recent developments and the key technologies were systematically analyzed based on studying information in both academic and commercial fields. And five kinds of key technologies were brought forward, which were seeding mechanical grabbing technology, seeding romanticized delivering technology, stock/scion cutting technology, stock/scion joining technology and controlling technology for the grafting system. Moreover, the conclusion and prospection for the worldwide automatic grafting technologies were provided from three aspects: firstly, the level of the automation for grafting machines would make a further progress in the near future; secondly, the amount of the plants that a single grafting machine can process was supposed to increase; thirdly, the state of the art technologies in relationed fields, such as agronomy, ergonomie and artificial intelligence, would promote the grafting machines’ performance more in the future.
vegetables; automatic grafting; robot
10.6041/j.issn.1000-1298.2017.03.001
2016-12-19
2017-02-21
国家高技术研究发展计划(863计划)项目(2012AA10A506)和国家重点研发计划项目(2016YFD0701901)
张凯良(1982—),男,副教授,主要从事生物生产自动化及机器人技术研究,E-mail: zhang_kailiang@cau.edu.cn
张铁中(1956—),男,教授,博士生导师,主要从事生物生产自动化及机器人技术研究,E-mail: zhangtz56@163.com
S604.3; TP242.6
A
1000-1298(2017)03-0001-13
猜你喜欢
中国蔬菜(2022年6期)2022-06-22
今日农业(2021年10期)2021-11-27
落叶果树(2021年6期)2021-02-12
中南林业科技大学学报(2020年9期)2020-09-28
河北果树(2020年2期)2020-05-25
现代园艺(2017年21期)2018-01-03
新农业(2017年3期)2017-05-17
农家顾问(2016年4期)2016-11-19
中国蔬菜(2015年9期)2015-12-21
中国火炬(2015年12期)2015-07-31
