
发那科机器人喷涂系统图形用户界面软件的开发与应用
2017-04-16 05:15杜永聪
上海电气技术 2017年4期
杜永聪, 徐 磊
上海发那科机器人有限公司 上海 201906
发那科机器人喷涂系统图形用户界面软件的开发与应用
杜永聪,徐磊
上海发那科机器人有限公司上海201906
介绍了发那科机器人喷涂系统图形用户界面软件PAINTworks的设计,分析了软件的开发环境及其与各底层设备之间的通信方法,并给出了软件开发中的一些实用技术。
机器人;喷涂;图形用户界面;软件;设计;应用
1 研究背景
现阶段国内机器人喷涂系统[1-3]应用的图形用户界面(GUI)大部分采用人机界面产品,或Intouch[4]、WinCC[5]、Cimplicity、Fatory Talk View等电脑端组态软件进行快速开发,特点是开发周期短。
但是,不同客户所要求开发的软件不同,需要采用不同的开发软件环境,并针对不同的可编程序控制器(PLC)来开发相关界面和接口。实际情况是,每款组态软件由于机制不同,开发出的界面存在不同,不能很好地推行标准化操作与人机交互方式。
发那科基于VB.Net开发了PAINTworks软件,可以实现与发那科机器人[6]及不同品牌PLC的通信,开发人员只需要关注客户要求的不同PLC接口即可,而不需要重新开发GUI。PAINTworks软件实现了系统操作标准化,并且能够同时与PLC和发那科机器人进行通信,具有较高的迭代性,提升了用户体验。
2 总体设计
2.1 功能架构
发那科GUI软件PAINTworks的主要功能是配置系统参数,修改机器人工艺参数,监控喷房状态和机器人输入输出信号,进行流量、转速、空气、高压等测试[7],生成生产报告、报警报告、停机报告和修改记录等。软件架构如图1所示。
2.2 开发环境
软件基于VB.Net 2008和.Net Framework 3.5平台开发,可以运行在32位或64位Windows 7操作系统中。
3 接口设计
如图2所示,计算机端通过以太网网络[8]访问其它终端设备,计算机端运行GUI软件PAINTworks,实现对PLC和机器人的监控与操作。计算机端与其它以太网设备之间的通信内容见表1。其中,PAINTworks通过Libnodave库与西门子PLC进行通信,读写PLC变量,达到监控目的。PAINTworks
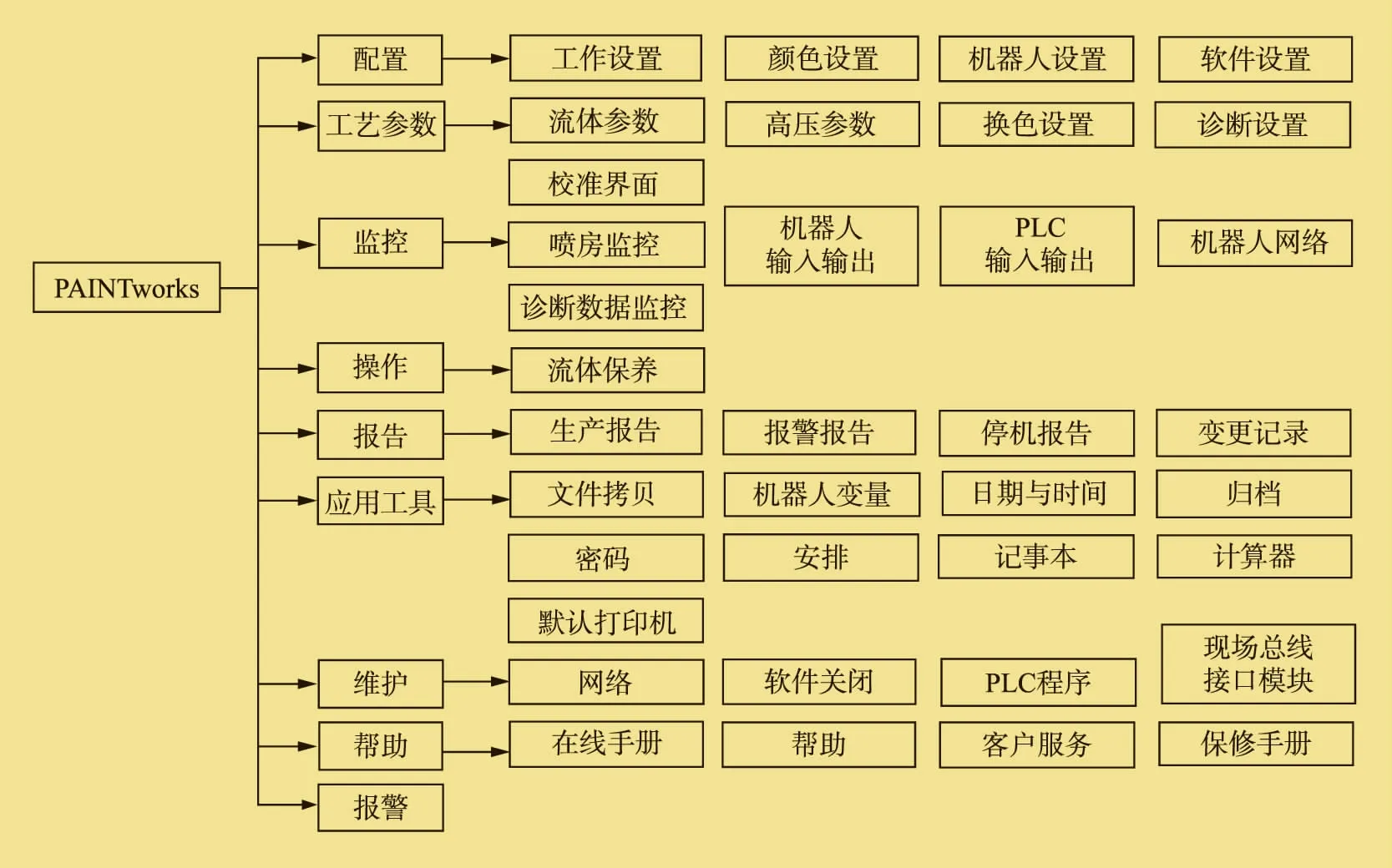
图1 PAINTworks软件架构
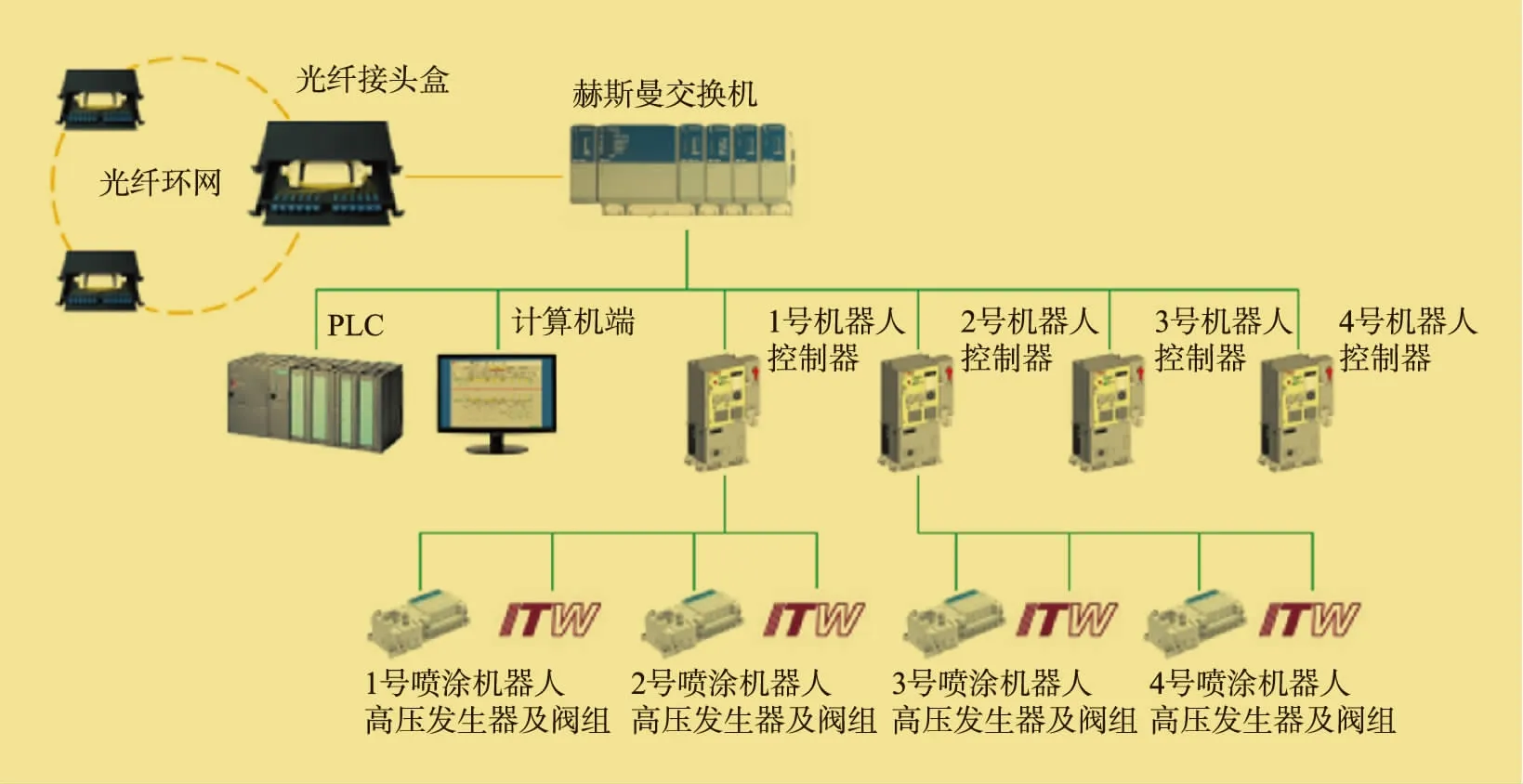
图2 系统网络示意图
通过PCDK软件提供的库与机器人进行通信,监控机器人变量、报警、输入输出等信息,通过文件传输协议与机器人进行文件操作。
3.1 PLC通信接口
PAINTworks与各PLC之间的通信采用了不同的技术,见表2。
以与西门子PLC通信为例,介绍接口实现。
Libnodave库提供与西门子S7-200、300、400系列PLC数据交换的方法,也可以与VIPA Speed 7中央处理器(CPU)及SAIA S7兼容PLC进行数据交换。数据包括PLC程序的所有内存区域和变量,如标记、输入输出映射区、数据块、定时器、计数器等。
另外,Libnodave库也提供了编程软件的部分功能,如读取诊断信息,从PLC中读取程序块,向PLC中写程序块,启动和停止PLC。Libnodave库是GPL和LGPL许可下的免费软件,可以运行在UNIX和Windows操作系统上。

表1 系统通信内容
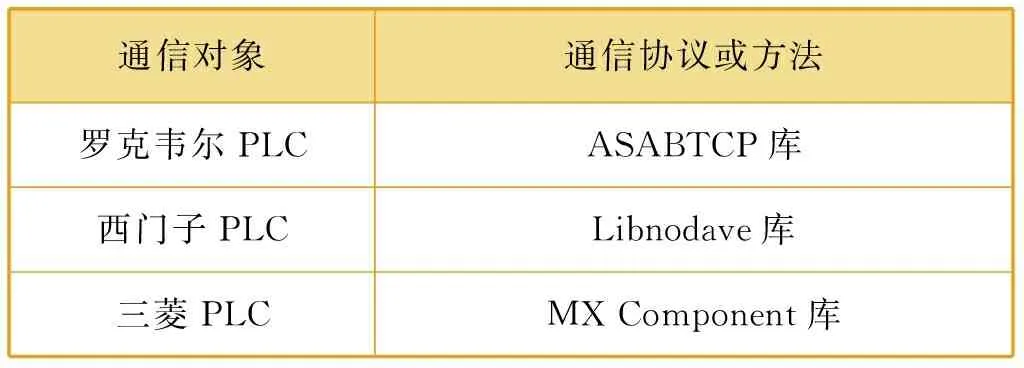
表2 PAINTworks与PLC通信技术
想要使用Libnodave库建立与PLC的连接,首先需要配置计算机串口或建立一个TCP[9]连接。以TCP连接为例,建立一个连接,读取变量的流程如下:
fds.rfd=openSocket(102, IPaddress_of_CP);
fds.wfd=fds.rfd;∥配置TCP连接
di=daveNewInterface(fds, "IF1", localMPI, daveProtoXXX, daveSpeedYYY);∥用建立的连接初始化接口
res =daveInitAdapter(di);∥用初始化的接口初始化适配器
dc =daveNewConnection(di, MPI_address, Rack, Slot);∥初始化连接对象
res =daveConnectPLC(dc);∥建立连接
res=daveReadBytes(dc, AREA, area_Number, start_address, length, buffer);
res=daveWriteBytes(dc, AREA, area_Number, start_address, length, buffer);∥交换数据
daveDisconnectPLC(dc);∥断开连接
daveDisconnectAdapter(di);∥断开适配器
3.2 机器人通信接口
PAINTworks通过PCDK与发那科机器人通信。PCDK专用于发那科机器人控制器与以太网通信,包含机器人服务器、机器人网络邻居和FTP,其各部分功能如图3所示。
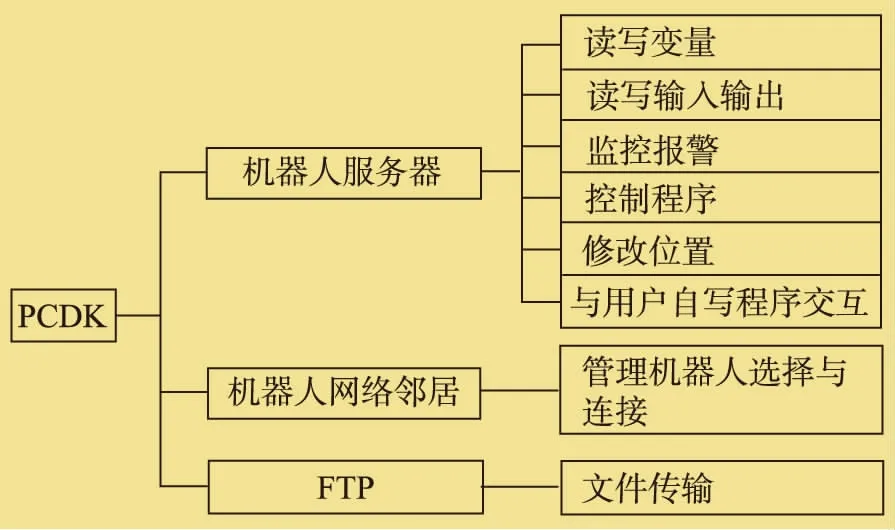
图3 PCDK功能示意图
4 其它技术应用
4.1 用户自定义控件与接口
喷房监控界面是GUI的主界面,如图4所示,主要包括监控喷房所有元器件状态、机器人控制器状态、机器人状态、车身队列信息、各机器人工艺参数,以及喷房系统、输调漆系统、输送链系统互锁信号状态。在界面上也可以修改队列信息,操作机器人移动特殊点。
喷房监控所涉及到的控件布局在UserControl控件界面中,软件为每个不同的喷房设计了不同的UserControl控件界面。在一汽大众新增内表面喷涂机器人项目中,设计有如下5个界面: ① uctlBC1Booth;② uctlCC1Booth;③ uctlBC2Booth;④ uctlCC2Booth;⑤ uctlPrimeBooth。
当应用PAINTworks时,只要通过参数配置不同的站名,程序便自动选取不同的喷房界面进行显示。程序设计了接口来对应5个不同的UserControl控件界面,具体如下:
Friend Interface BSDForm
ReadOnly Property FormName() As String
Property PLCData() As String()
Property IsRemoteZone() As Boolean
Property RobotIndex() As Integer
Property ScatteredAccessData() As String()
Property LinkIndex() As ePLCLink
Sub Initialize(Optional ByVal sParam As String = "")
Sub MakeCarMove()
Sub subUpdateSAData()
Overloads Sub Show(ByVal StartData As String())
Sub PrivilegeChange(ByVal NewPrivilege As ePrivilege)
Sub subCleanUpRobotLabels(ByVal rArm As clsArm)
Sub InitPLCData()
Sub UpdatePLCData(Optional ByVal pLink As ePLCLink = ePLCLink.None)
End Interface
4.2 可扩展标记语言(XML)与结构化查询语言(SQL)
PAINTworks中有很多参数与变量,有些存储在PLC中,有些存储在数据库中,有些则存储在机器人中。对数据进行划分,PAINTworks中的数据及存取位置见表3。
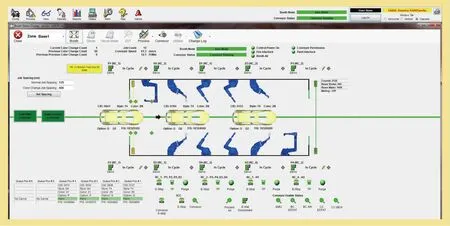
图4 喷房监控界面截图

表3 PAINTworks数据划分
XML是一种标记电子文件使其具有结构性的标记语言,可用于传输和存储数据。它与Access、Oracle和SQL Server等数据库不同,不提供数据分析能力,但是极其简单,编辑方便,适合存储小数据量的系统配置参数,不需要安装额外的管理软件,使用记事本即可编辑。工作站的配置参数设计如下:
对于类似生产记录的数据,由于数据量不断增加,并且需要保存几个月以上,这时XML就不适用了。PAINTworks使用了SQL Server数据库来存取大量记录数据,包括生产记录、报警记录和变更记录。
5 总结
PAINTworks软件可以直接方便地与PLC和发那科机器人进行通信,不需要组态软件通过中间件来实现与发那科机器人的通信,能够降低项目采购组态软件的成本,具有一定优势,且对机器人行业应用GUI开发具有借鉴意义。PAINTworks软件已成功在一汽大众、通用汽车、长安汽车、广汽乘用车[10]等客户现场应用。
[1] 徐磊,杜永聪,黄文斌.水性涂料机器人喷涂线控制系统的设计与开发[J].上海电气技术,2015,8(3): 13-17.
[2] 周宜,张宜胜,顾玉兴.机器人喷涂生产线控制系统的设计和应用[J].上海电气技术,2009,2(2): 6-10,37.
[3] 舒章钧.FANUC机器人在驾驶室自动喷涂线上的应用及电气控制[C].2014中国汽车工程学会年会,上海,2014.
[4] 汤雪华,齐亮,陈江洪,等.基于InTouch组态软件的油压机监控装置的设计与应用[J].上海电气技术,2009,2(2): 20-24.
[5] 张凯.基于WinCC的单晶硅提拉生长系统应用研究[J].上海电气技术,2009,2(2): 32-37.
[6] 陈炎钦,金玉嵌,周翔.FANUC机器人激光跟踪系统在电控柜焊接中的应用[J].上海电气技术,2014,7(4): 31-35.
[7] 李梁.基于FANUC P500浅析喷涂机器人换色系统[J].现代涂料与涂装,2015,18(10): 53-55.
[8] 余颖,张琦明.基于PC平台的开放型工厂能源管理系统的实现[J].上海电气技术,2010,3(3): 16-21.
[9] 谭福生,杨军,申纯太.基于TCP/IP协议激光测距仪数据读取及在Labview的实现[J].上海电气技术,2010,3(1): 1-4.
[10] 郭磊,曲银燕.通用汽车公司北美工厂新建轿车涂装线参观小结[J].材料保护,2007,40(1): 65-67.
(编辑: 启德)
Introduced the software PAINTworks that applied to the design of GUI for FANUC spraying robot system, analyzed the development environment of the software and its communication methods with the underlying equipment and gave some practical techniques in software development.
Robot;Spraying;GUI;Software;Design;Application
TM571
A
1674-540X(2017)04-050-05
2017年8月
杜永聪(1988—),男,硕士,工程师,主要从事涂装机器人自动化控制系统软件开发与应用工作,E-mail: duyongcong@shanghai-fanuc.com.cn
猜你喜欢
河北农机(2020年10期)2020-12-14
福建质量管理(2019年10期)2019-03-28
软件(2018年7期)2018-08-13
专利代理(2017年1期)2017-07-21
凿岩机械气动工具(2017年2期)2017-07-19
长春师范大学学报(2017年9期)2017-03-29
工业设计(2016年11期)2016-04-16
中国铸造装备与技术(2015年5期)2015-12-10
电子世界(2014年12期)2014-10-21
中国新技术新产品(2011年3期)2011-01-23
