
基于ARM的雷达整车智能配电系统显控管理模块的设计与实现
2017-04-15 19:19张兢晶
数字技术与应用 2016年12期
张兢晶
摘要:为了满足雷达整车智能配电系统模块化的设计需求,本文设计了一种的显控管理模块。该模块基于ARM Cortex-M4内核的单片机设计,通过一路CAN总线与其他内部执行模块进行组网通讯,实现对内部执行模块的通信与控制,通过RS232串口通讯将配电数据显示在液晶屏幕中,用户可以通过触屏或按键对执行模块进行控制。此外,显控管理模块还可以通过以太网或另一路CAN总线与上级系统进行通信,将雷达整车的配电参数整合到上级监控系统中。
关键词:雷达整车智能配电 显控管理模块 CAN总线通信 触屏 液晶显示
中图分类号:TM73 文献标识码:A 文章编号:1007-9416(2016)12-0001-02
1 引言
随着雷达整车系统对后级设备用电状况的信息越来越重视,对安全性和智能化管理的要求越来越高,传统的配电已经不能满足雷达整车操作的需求。为此,一套能够综合采集、监控、保护及显示各级配电设备信息的智能化、模块化的配电系统,能够极大程度的提高生产、调试、维修的效率,也给用户对雷达整车系统的供电管理带来全新的体验。
显控管理模块作为雷达整车智能配电系统的重要组成部分,主要采用现代计算机、信息处理、通信及触摸液晶屏显示等技术,完成对配电网和负载的运行进行监视、管理和控制,是整车配电系统的监视、控制和管理中心。
2 整体设计
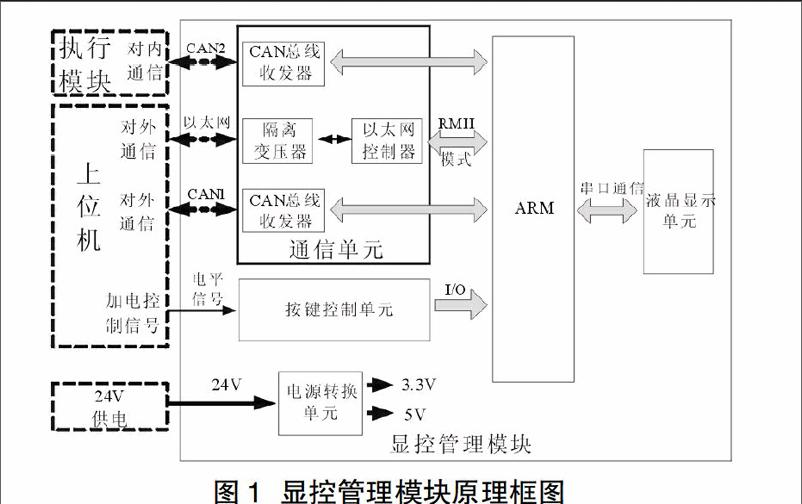
整个配电系统是基于模块化的设计思路,显控管理模块作为系统的核心管理控制模块,主要通过CAN总线对内部执行模块进行通信、从而实现控制、配电数据的采集与实时显示。显控模块原理框图如图1所示,显控模块包括了基于ARM内核的高性能单片机、通信单元、电源转换单元、按键控制单元以及液晶显示单元。
3 单元设计
3.1 单片机介绍
显控模块的单片机采用的是基于ARM内核的STM32F407ZGT6芯片,工作频率可以达到168MHz。该芯片使用广泛,接口齐全,它最多有140个I/O口,3路12位A/D转换器,2路12位D/A转换器等,通信接口有2路CAN控制器,3路SPI串口,2路I2C,2路UART等,完全满足了本设计的要求。
3.2 通信单元
显控模块的通信单元主要包括对内通信和对外通信。对外通信使用以太网或CAN通讯方式,将配电数据传输给上位机。对内通讯采用CAN总线方式进行连接组网,实现对后级执行模块的控制与管理。
网口电路采用ARM内部MAC控制器结合以太网PHY控制器(DP83848IVV),通过RMII连接模式,经隔离变压器(H1102NL)输入输出,实现网口通信。CAN接口采用ARM内部两路CAN控制器,结合隔离CAN总线收发器(ADM3053BRZ),构成双CAN通讯网络。
3.3 电源转换单元
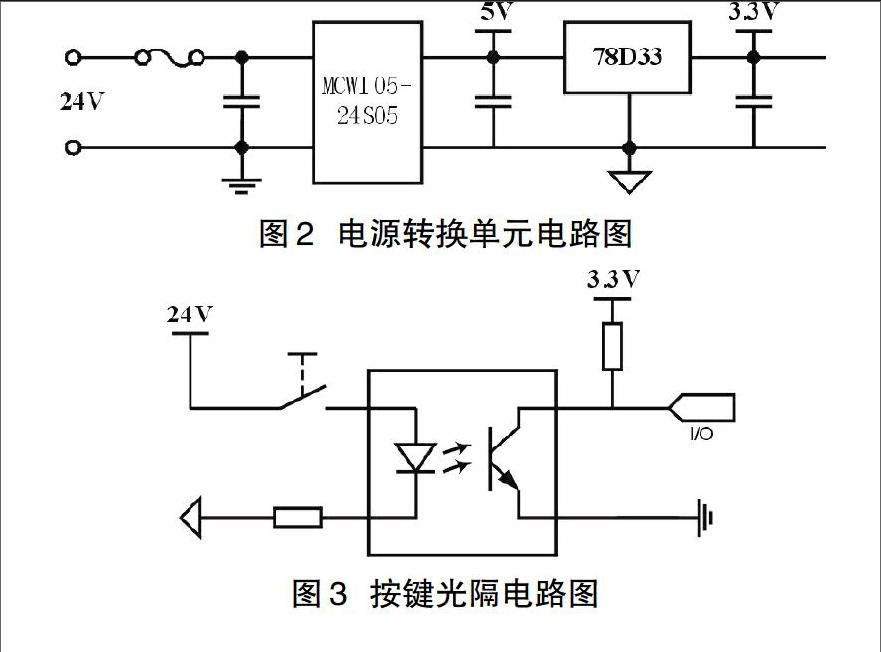
电源转换单元采用MINMAX公司DC/DC模块MCWI05-24S05。先将输入24V电源转换成5V,然后再使用78D33三端稳压器,转换成芯片所需要的3.3V。电路图如图2所示。
MCWI系列DC/DC模块采用SIP-8封装,具有小体积(21.8*9.3mm),较高的输出效率(83%),且具有4:1宽输入特性,输入电压范围在9V~36V,输出功率为5W。
3.4 按键控制单元
为了实现配电系统的本控加电操作,显控管理模块预留了16路本控非持续动作型按键,可以对16个执行模块进行加断电操作。此外,上位机同样有按键电平控制信号,对执行模块进行逻辑控制。
按键电路采用光耦隔离方式,可以有效的隔离按键供电对单片机控制电路的影响。电路图如图3所示。
3.5 液晶显示单元
液晶显示单元选择了英硕自动化公司的EPP320-0571-35触摸液晶屏幕。该屏幕不仅仅是一款显示器,它相当于一个小型的嵌入式显示终端,可以执行所有控制器上能运行的软件组件。可以通过Automation Studio编程工具进行编程。
该液晶终端外置了串口、网口、USB等通讯接口,便于开发和调试,从硬件资源上已经可以完全满足项目设计要求,同时其显示系统比较清晰,5.7寸的显示屏,分辨率达到了QVGA级,用户的使用体验优于一般市面上的液晶屏。此外,软件开发环境Automation Studio功能强大,使用户可以较为简单的设计出友好的操作界面,其多任务的操作系统Automation Runtime设计思路和丰富的底层库函数使用户可以写出健壮的控制显示程序。
4 软件设计
显控模块主要包含2个部分的软件设计:单片机软件设计和液晶显示器的软件设计。
4.1 单片机软件设计
单片机的软件设计主要是利用MDK-ARMKeilv4.7开发软件对STM32F407进行编程设计。
显控模块的单片机程序包含两个部分:主程序(main)和中断服务程序(ISR)。系统的主程序简单,主要完成了一些外设的初始化和TIM等设备中断的初始化,其中UART通讯速率设定为115200bit/s,CAN通讯速率设定为500kbit/s。系统的中断服务程序由三级中断嵌套而成,分别为定时器中断级别第三(最低),UART接收中断级别第二,用于液晶模块的通信,CAN接收中断级别第一(最高),用于内部CAN总线通信。
ISR中的定时器中断服务周期为100ms,所有其他功能函数以及其他中断服务函数均必须在这100ms内完成。选择该设计方式主要为了达到两个目的:其一是以100ms为控制周期的主要目的是在用户最快反应周期(0.1s)内完成对液晶模块内容的更新,使得液晶模块能够实时显示所有子设备的运行信息,提高用户体验和使用感受;其二是该设计方式可以确定系统对外部事件的响应速度,对配电系统的实时性得到一定控制和预测。
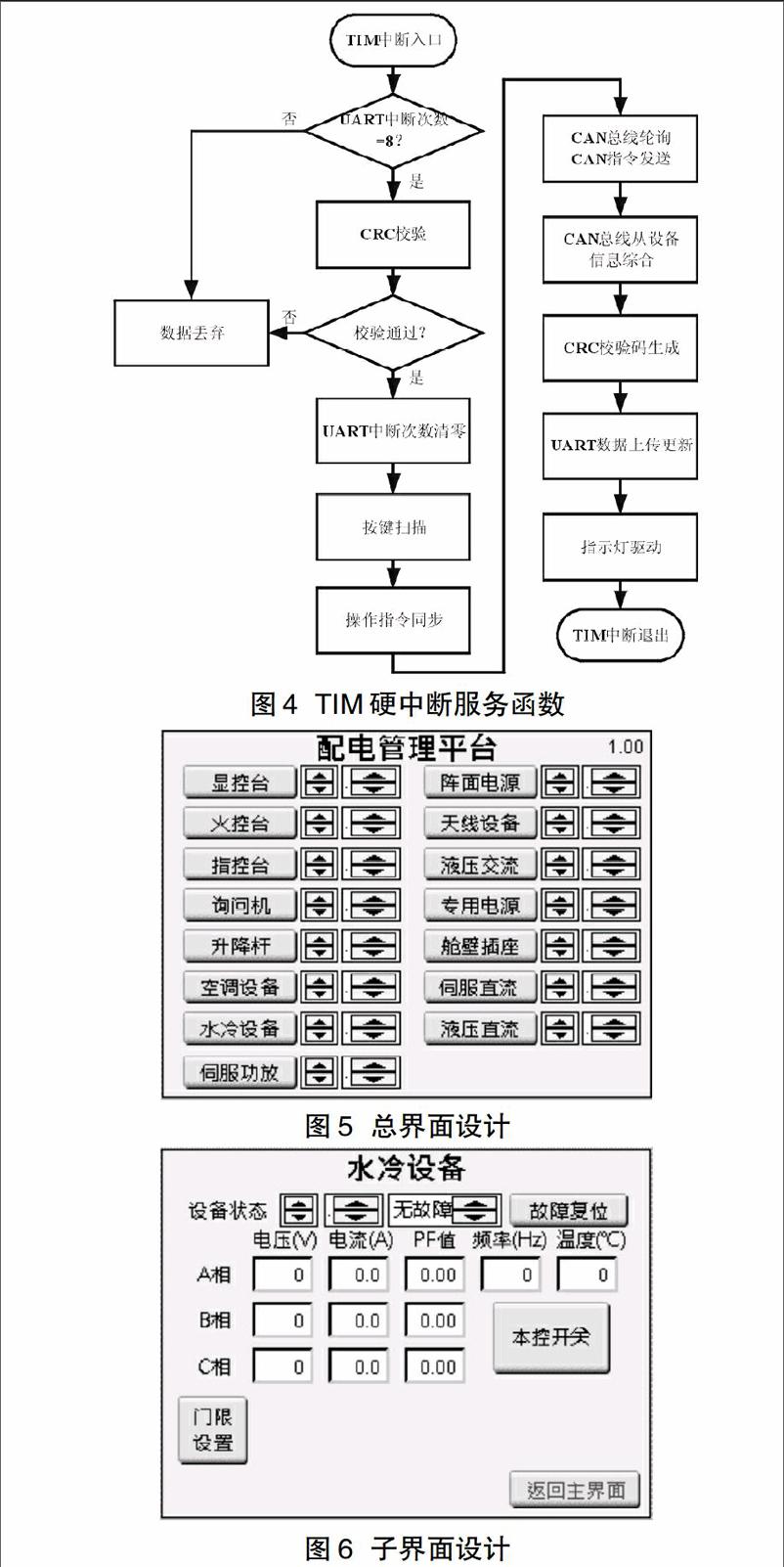
定时器中断服务函数主要完成了对液晶模块的发送数据和接收数据的CRC-16校验、对按键的防抖扫描、对液晶模块操作指令和按键操作指令的综合判断和信息同步、对CAN总线上从设备的控制指令发送和设备周期轮询,其函数流程图如图4所示。
4.2 液晶模块软件设计
液晶模块的软件设计主要是利用Automation Studio软件对EPP320屏幕进行编程,编程包括界面的设计和后台程序的编写。在Automation Studio中设计界面非常简单,软件内部已经提供了大量的显示对象供用户使用,大多数的显示对象提供了特定唯一的控制变量,通过后台的变量声明和捆绑环节,用户可以通过更改控制变量来更改显示对象的效果。软件设计的界面如图5、图6所示。图5为智能配电平台的总界面,可以显示后级设备的工作状态信息,图6是其中一个设备的详细页面,在详细页面内会具体的显示该设备的运行信息,例如电压、电流、温度等,并可以人为的复位或更改其内部保护门限参数。
5 实物展示(图7)
6 结语
该显控模块已经完成调试,并已安装于雷达整车智能配电系统之中。全系统已经顺利通过项目实测验收,在功能上,稳定性上,操作性上都满足项目设计要求。
参考文献
[1]李飞飞.基于ARM的模块化配电变压器监测终点研制[D].天津大学硕士学位論文,2012.
[2]苏凯凯.智能配电监测系统的设计与开发[D].北京交通大学硕士学位论文,2012.
[3]王文兵.基于CAN总线和LIN总线的智能配电系统设计[D].合肥工业大学硕士学位论文,2009.
猜你喜欢
装备制造技术(2020年4期)2020-12-25
父母必读(2019年9期)2019-11-04
现代电子技术(2018年14期)2018-07-27
科技资讯(2017年27期)2017-11-24
通信电源技术(2016年4期)2016-04-04
工业设计(2015年12期)2015-10-21
化学工业与工程(2012年6期)2012-02-10
物理与工程(2010年5期)2010-03-25
