
高精度波束形成的相控阵超声系统研究*
2017-04-14 07:18李杏华江尚良刘全利苏智琨
传感技术学报 2017年3期
李杏华,江尚良,刘全利,王 雪,苏智琨
(1.天津大学精密测试技术及仪器国家重点实验室,天津 300072;2.中国石油天然气管道科学研究院,河北 廊坊 065000)
高精度波束形成的相控阵超声系统研究*
李杏华1*,江尚良1,刘全利2,王 雪2,苏智琨1
(1.天津大学精密测试技术及仪器国家重点实验室,天津 300072;2.中国石油天然气管道科学研究院,河北 廊坊 065000)
为深入研究管道环焊缝缺陷特性,需要相控阵检测系统提供完全控制激励信号参数和获得接收回波信号的特性,针对该问题设计了32个模拟通道,可接入128个阵元,数字化频率达到125 Msample/s的相控阵超声检测系统。采用流水线式延时实现小数倍延时,脉冲发射延时精度为2.5 ns;使用Master-Slave结构的管理方式,在硬件上合理分配资源,对回波数据进行线性插值,同时根据脉冲的延时方案对各通道的插值数据进行存储,实现高精度数字波束形成。使用Hilbert变换提取形成波束在FIR滤波器滤波前后的包络,得到滤波后信噪比提高了9.4 dB。对标准试块进行缺陷检测实验,实验表明在深度上缺陷定位的相对误差为1.7%,相对于现有系统检测精度提高了接近2倍。
相控阵;波束形成;延时;FPGA
随着相控阵检测技术的进步,包括集成电路、波束合成技术、换能器等,相控阵系统应用范围越来越广[1]。相控阵超声系统的研究主要包括硬件器件的选择、换能器的设计和开发、阵列信号处理和波束形成等[2-4]。
国外研发的相控阵探伤仪已经商业化,如Olympus生产的TomoScan系列和OmniScan系列。但是商业设备不能提供完全控制激励信号参数和获得接收回波信号的特性,而且价格昂贵,因此急需开发一套开放的相控阵检测系统。Jensen J A等为了减少系统的复杂度,达到较高的空间分辨率,提出了合成孔径的方法,但是这种方法损失了对比度分辨率[5];Diarra B等将模拟退火算法结合随机稀疏阵列,有效地减少激活阵元数,同时最小化旁瓣效应[6];Hasegawa H等使用发散发射波束和并行接收波束形成,达到超过300 Hz的高帧率,图像分辨率比稀疏扫描好[7];Rasmussen M F等对相控阵合成孔径和并行波束形成进行对比,提出了每种方法的优缺点[8]。与国外相比国内的起步较晚,主要是高校和研究机构在做这方面的工作。南京信息工程大学的孙亚杰等采用直方图匹配、模糊集的方法增强相控阵检测图像,从而提高图像的可识别度[9-10];天津大学的李建等结合小波包和BP神经网络,对碳纤维增强复合材料的不同缺陷的识别率达到95.7%[11];北京大学的高鹏等利用非线性超声相控阵检测,具有空间分辨率高、缺陷分辨率强等优点[12];天津大学的焦志海等利用数字正交解调技术,实现数字波束合成信号包络幅值的提取,横向分辨率提高25%,信噪比提高了3.7 dB[13]。在这些研究中,具有同样的目的就是提高检测分辨率,但是为了减少系统复杂性及系统成本,会减少激活阵元数,这样即使运用了一些方法,由于受到硬件基础的限制,检测效果还是不理想。
综合考虑国外商业设备的限制及目前国内研发的系统具有规模小、通道数少、处理能力低的局限,本文开发了一套能够提供完全控制激励信号参数和获得接收回波信号的特性的相控阵检测系统,其具有32个独立通道,可接入128个晶片,数字化频率达到125 Msample/s。该系统使用分布式硬件结构,采用Master-Slave结构的管理方式,利用流水线式延时技术实现脉冲发射的小数倍延时,通过对回波数据进行线性插值,采用对RAM寻址的方式,获得数字合成波束。在对比实验中,本文设计的系统和M2M Pocket 16×64超声相控阵检测系统分别对同一个标准试块中的同一缺陷进行检测,实验结果表明本系统对缺陷的检测精度提高了接近2倍。
1 相控阵检测原理
相控阵检测的基本原理是通过控制每个声波从各自声源发出的时间不同,使得声波在相交处产生声能增强或削弱的相位效果,实现声束的偏转和聚焦。工业中常用的相控阵探头通常与楔块组合一起使用,晶片向楔块发射声波[14]。如图1所示是相控阵换能器声束偏转聚焦的示意图,x轴表示楔块与被测材料的分界面,z轴穿过阵列中心(x0,z0)[15]。根据几何关系及snell定理可得第n个阵元的延时值为:
(1)
式中:τ0是一个足够大的常数,以避免τn出现负的延迟时间。
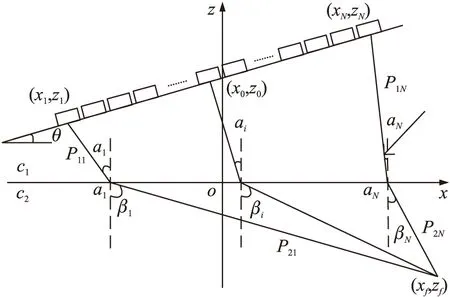
图1 相控阵换能器声束偏转聚焦的示意图
声波遇到被测物体底面或缺陷时会发生反射,反射回来的信号叫做回波信号。回波信号最基本的表现形式是A扫描,即波形显示。对于A扫信号,通过计算缺陷回波的声程来定位缺陷。当移动探头时,同一个缺陷会出现在多个A扫信号中。当声束聚焦到缺陷边缘时,A扫信号会出现小峰值,随着声束聚焦点靠近缺陷中心位置时,A扫信号的小峰值会越来越大,当声束聚焦点远离缺陷中心时,A扫信号的小峰值越来越小,直到小峰值消失。当A扫信号出现最大值时,根据此A扫信号就可以计算出缺陷的中心位置。
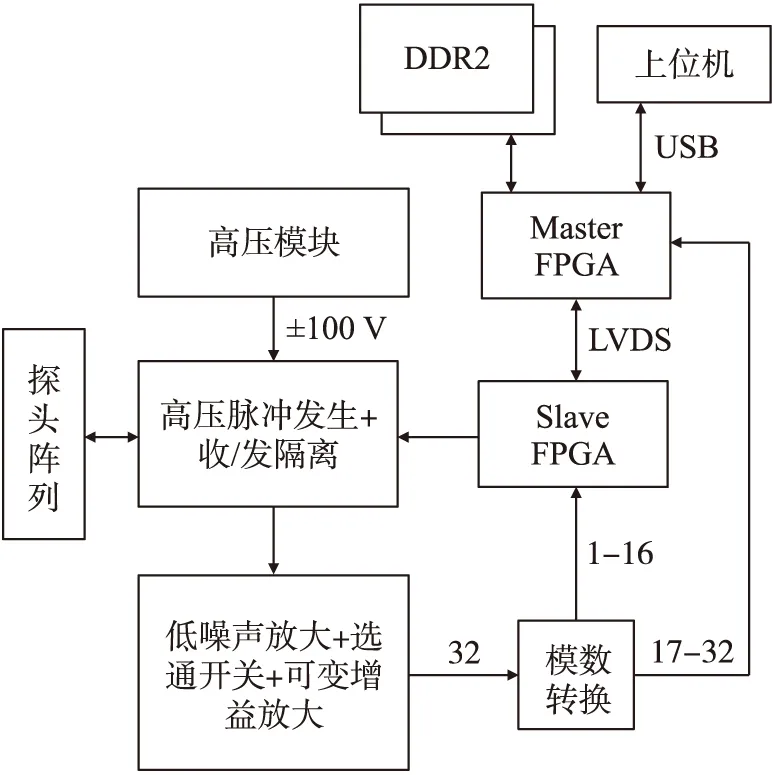
图2 相控阵超声系统的原理框图
2 相控阵检测系统
如图2所示为用于管道缺陷检测的相控阵超声系统的原理框图。系统可以接入128个阵元、具有32个模拟通道。接入128个阵元意味着最多可以同时发射128个激励脉冲,这样可以提高脉冲发射功率,提高系统信噪比。32个模拟通道可以同时采集32个回波信号,保证系统具有较高的空间分辨率。系统的通道数多,数字化频率高达125 Msample/s,使得数据量大,而且考虑到FPGA资源分配的问题,采用主从模式来实现大数据量的处理。系统是自主开发的,底层硬件对使用者完全开放,可以根据要求设置高压脉冲的参数产生相应的脉冲信号,获得所有通道的回波数据。
系统工作过程是Slave FPGA接收到发射聚焦参数,包括脉冲极性、高压幅值、发射孔径、各阵元的延时等,生成高压脉冲控制信号,发送到高压脉冲发射电路中,其中每个高压脉冲需要两个控制信号实现4种状态,分别为发射建立、发射正高压、发射负高压、接收回波。Master FPGA控制模拟前端的工作模式,包括通道选择、增益调节、数据转换率、数据位数、差分阻抗匹配,其中最多能从128中选择32通道,采用两级增益,最大增益为96 dB,数据位数12 bit。接着两个FPGA通过高速串行总线LVDS分别采集16路模拟信号,分别进行波束形成,然后Slave FPGA将形成后的数据通过LVDS发送到Master FPGA中实现最终波束形成,并且将形成波束发送到上位机中。
3 主从波束形成设计
3.1 脉冲信号的产生
Slave FPGA产生脉冲控制信号,从而产生脉冲信号。为了实现声束聚焦,由式(1)计算得出每个通道的脉冲信号延时。延时是由系统工作频率倒数Ts的整数倍和小数倍之和形成,可表示为:
τn=pTs+qTa
(2)
式中:p、q为整数,Ta为延时精度。整数倍的延时,通过对工作频率计数即可实现。小数倍的延时决定了系统的延时精度,采用流水线式延时实现小数倍延时。这种方式中,需要使用多个不同相位的时钟,根据不同的延时值使用相应的工作时钟。
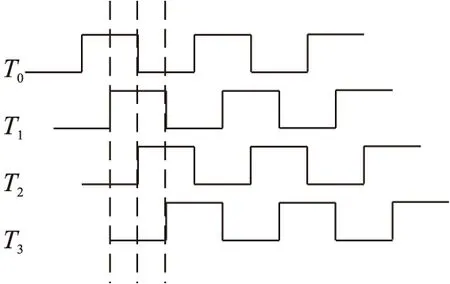
图3 流水线式延时时钟关系
如图3所示为时钟的相位关系,每个时钟的频率为100 MHz,相邻时钟延时差为2.5 ns。以T0为基准,T1偏转90°,T2偏转180°,T3偏转270°,延时值分别为2.5 ns、5 ns、7.5 ns。通过这种流水线式延时,可以实现脉冲发射延时精度为2.5 ns。提高时钟频率就可以提高延时精度,但是时钟频率高的话本身的抖动较大会影响延时精度,同时会增大时序约束的难度。综合考虑,本设计中采用100 MHz时钟,延时精度达到2.5 ns。
根据不同的延时值,通过时钟选择器从4个不同相位的时钟选择其中一个作为对应通道产生脉冲控制信号的工作时钟。如图4所示为产生脉冲的框图,Master FPGA根据一定的频率向Slave FPGA发送通道延时值,完成发送延时值的下一个周期发送计数触发信号。Slave FPGA收到计数触发信号后,各个通道选择相应的时钟开始计数,计数到相应的延时值后,产生脉冲触发信号。此信号触发脉冲产生模块输出脉冲芯片的控制信号,从而为各个通道产生具有一定延时并且延时精度为2.5 ns的脉冲信号。为了保证延时精度达到设计要求,对整体设计添加时序约束,从而使得设计满足建立保持关系的要求。
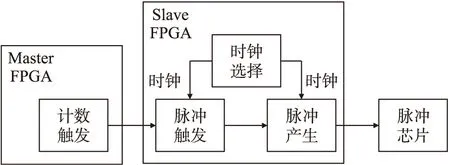
图4 产生脉冲的框图
3.2 接收波束形成及数据处理
本文采用的主从接收模式是针对整体规模大的系统设计的,如图5所示为主从波束形成的结构。全部通道分两组,先进行组内的波束形成,然后再进行组间波束形成。各通道插值后的信号经过延时、求和形成次级波束,接着Slave FPGA将波束发送到Master FPGA中,形成最终波束,主从波束形成可表示为:
(3)
式中:i=1,2,分别代表主从;j=1,2,…,16,表示主从中的通道;τij表示主或从的第j通道的延时,由式(1)计算得出;y(n)为最终形成波束。
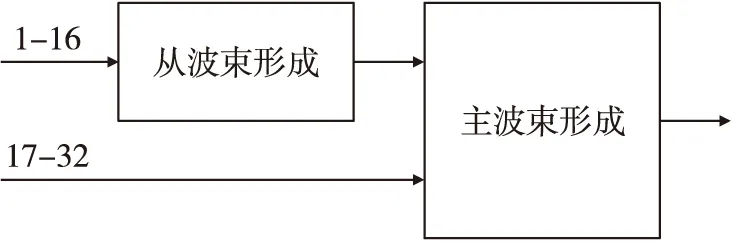
图5 主从波束形成的结构
为了使各通道的回波数据同相相加,需要为每个通道的回波数据进行延时,实现时间补偿。由于采样率相对于回波信号的最高频率大较多倍,数字回波信号很好地记录了模拟信号的信息,因此本文采用4X线性插值的方法,使得接收聚焦的延时精度达到2.5 ns。回波信号的采样周期为10 ns,需要在两个采样点之间插入3个数据。假设相邻的两个采样点分别为x(n)、x(n+1),插值点分别为x1、x2、x3,采用式(4)~式(6)可以仅使用一个周期计算出插值数据,提高了FPGA的工作效率。
(4)
(5)
(6)
本设计通过对RAM寻址实现延时,寻址方式如图6所示,箭头指向的单元为每个通道存储的首地址。延时是将第1个数据根据相应的延时值写到对应地址的单元中,然后依次将插值数据写入到RAM中。根据延时值计算出插值数据存储的首地址是延时的关键。插值完成后相邻数据点的时间间隔为2.5 ns,因此在RAM中相邻单元的延时为2.5 ns。根据式(2)可以得出存储器的首地址FA为:
(7)
本设计中Ts为10 ns,Ta为2.5 ns,因此假设延时值为32.5 ns,可得p=3,q=1,可得FA为13。在插值并且数据存放完成后,同时也实现了延时。此时各通道对应的RAM的相同地址的数据的相位一致,因此对各通道进行求和时只需要将不同RAM中相同地址的数据求和,实现数字波束形成。
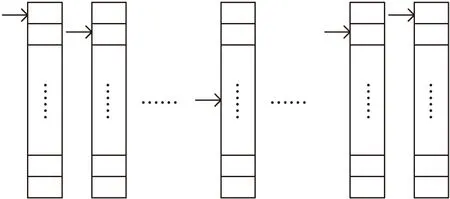
图6 RAM寻址方式
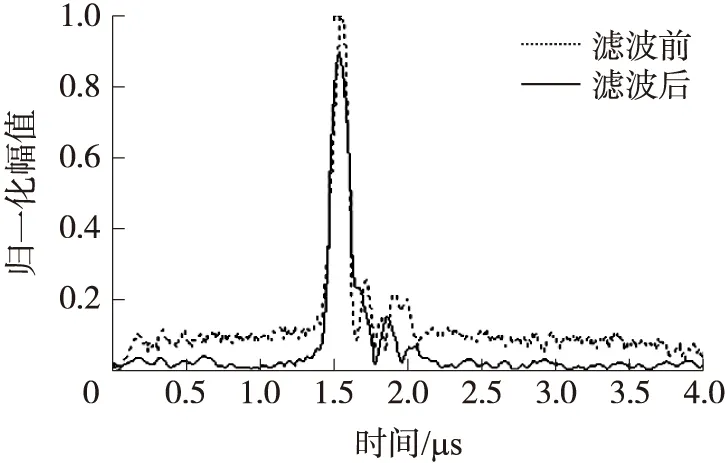
图7 滤波前后的形成波束包络
为了定量分析合成波束的信号质量,提取滤波前后信号的包络,求其信噪比。图7所示为采用Hilbert变换提取形成波束在FIR滤波器滤波前后的包络。从图7可以计算出合成波束滤波前的信噪比为19.6 dB,滤波后的信噪比为29 dB,信噪比提高了9.4 dB。
4 相控阵检测系统实验结果及分析
为了检验相控阵系统的缺陷检测能力,设计如下的缺陷检测实验。实验的目的是检测坡口焊缝中热焊区的缺陷,实验中使用的是标准试块,缺陷位于热焊区中心,坡口形状及参数如图8所示,实验中使用的换能器参数如表1所示,采样率为100 MHz。
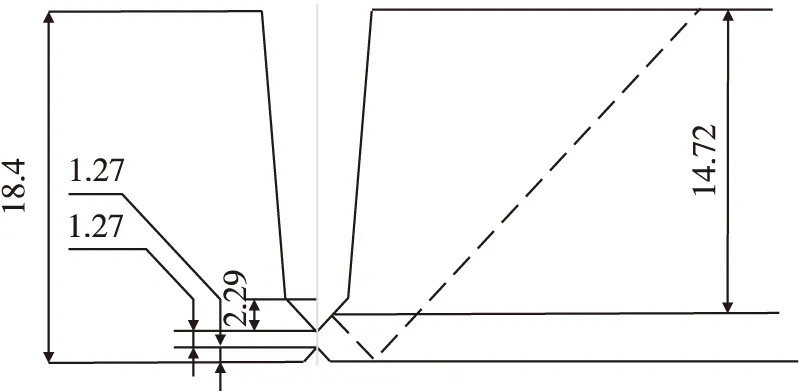
图8 坡口形状及参数(单位:mm)
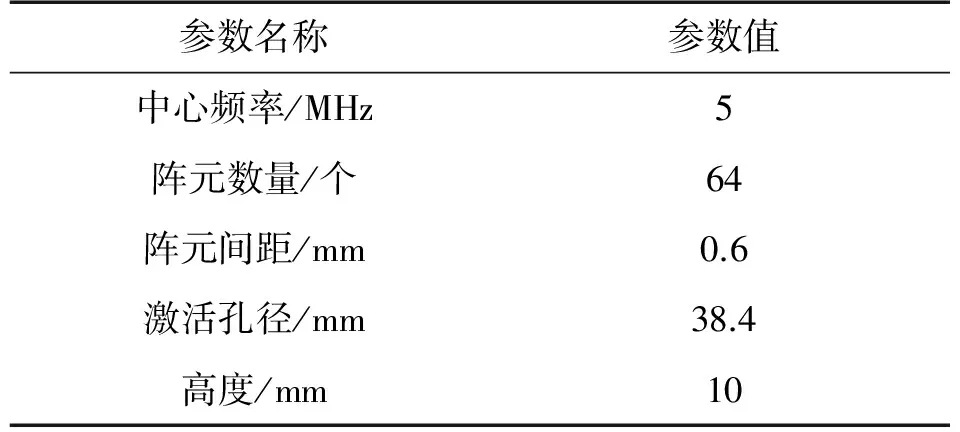
参数名称参数值中心频率/MHz5阵元数量/个64阵元间距/mm0.6激活孔径/mm38.4高度/mm10
实验中首先将换能器移动到使声束聚焦到热焊区的位置,然后再以2 mm的步进沿着管道周向移动探头,每移动一次记录一组A扫信号。从检测到缺陷到移出缺陷,可以获得多组A扫信号,如图9所示,(a)~(g)分别代表声束聚焦到缺陷边缘到缺陷中心到离开缺陷过程的A扫信号,图中的波形是延时45.9 μs开始截取,波束在楔块中的延时为34 μs。当出现最大波时,意味着声束打在热焊区缺陷的中心位置,从时间轴上看,最大波出现的位置为7.65 μs。波束在钢中的传播路径如图8虚线所示,根据几何关系及传播延时,可得出检测到热焊区中心的深度为14.47 mm。与实际深度相比,误差为0.25 mm,相对误差为1.7%。采用这种最原始的方法定位缺陷,在深度上达到1.7%的相对误差是比较小的。可见设计的32通道相控阵检测系统具有较高定位精度。
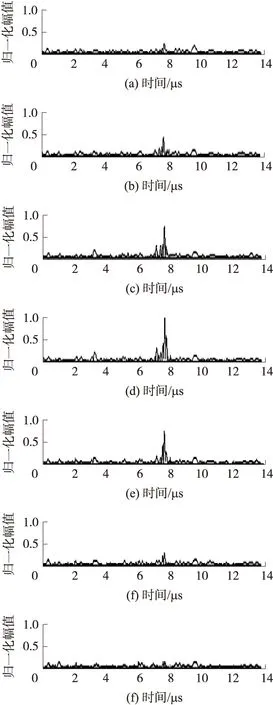
图9 (a-g)分别是声束聚焦到缺陷边缘到缺陷中心到离开缺陷过程的A扫信号

图10 M2M Pocket 16×64声束聚焦到缺陷中心的A扫信号
为了进一步说明系统的高精度特性,本文使用M2M Pocket 16×64超声相控阵检测系统检测图8所示的坡口焊缝中热焊区的缺陷。此系统具有16个独立通道,可接入64个晶片。实验中使用的换能器参数如表1所示,与本文设计的系统使用相同电机。在电机移动过程中,出现的最大波如图10所示,此波形同样延时45.9 μs开始截取,波束在楔块中的延时为34 μs。此波形为声束打在热焊区缺陷的中心位置时的回波,从时间轴上看,最大波出现的位置为7.85 μs。使用同样的方法可计算出检测到热焊区中心的深度为14.25 mm。与实际深度相比,误差为0.47 mm,相对误差为3.2%。
以上两个实验中,检测相同缺陷、使用相同电机及换能器的情况下,分别使用两套系统,本文设计的系统具有32个独立通道,M2M Pocket 16×64超声相控阵检测系统是16个独立通道。实验结果表明本文设计的系统相对于现有的设备具有较高的精度,检测精度提高了接近2倍,同时也表明了通道数多的系统的优越。
5 结论
设计并实现通道数多、数字化频率高的相控阵超声检测系统,采用流水线式延时技术实现脉冲发射的小数倍延时,采用Master-Slave结构,对回波数据进行插值以及使用对RAM寻址的方式实现高精度波束形成。通过Hilbert变换实现对形成波束包络的提取,比较FIR滤波器滤波前后的信噪比,滤波后信噪比提高了9.4 dB。对标准试块进行缺陷检测实验,实验表明系统能够有效定位缺陷,深度上的相对误差为1.7%,相对于现有设备检测精度提高了接近2倍。结合开放的接收发射单元,系统能够满足深入研究管道环焊缝缺陷特性的要求,同时需要相对较低的设备成本。
[1] Tsakalakis M,Bourbakis N G. Designing of a Low-Cost,Volumetric Multi-Transducer Phased Array Ultrasound System[C]//Bioinformatics and Bioengineering(BIBE),2015 IEEE 15th International Conference on. IEEE,2015:1-7.
[2] 卢超,劳巾洁,戴翔. 带楔块二维面阵列超声相控阵声场特性分析[J]. 声学学报,2014,39(6):714-722.
[3] 王文龙,师芳芳,张茉莉,等. 凹面线性相控阵聚焦与扫描成像[J]. 声学学报,2008,33(2):164-170.
[4] Matrone G,Savoia A S,Caliano G,et al. The Delay Multiply and Sum Beamforming Algorithm in Ultrasound B-Mode Medical Imaging[J]. Medical Imaging,IEEE Transactions on,2015,34(4):940-949.
[5] Jensen J A,Nikolov S I,Gammelmark K L,et al. Synthetic Aperture Ultrasound Imaging.[J]. Ultrasonics,2006,44(8):e5-15.
[6] Diarra B,Liebgott H,Tortoli P,et al. Sparse Array Techniques for 2D Array Ultrasound Imaging[C]//Acoustics 2012:1591-1596.
[7] Hasegawa H,Kanai H. High-Frame-Rate Echocardiography Using Diverging Transmit Beams and Parallel Receive Beamforming[J]. Journal of Medical Ultrasonics,2011,38(3):129-140.
[8] Rasmussen M F,Jensen J A. Comparison of 3-D Synthetic Aperture Phased-Array Ultrasound Imaging and Parallel Beamforming[J]. IEEE Transactions on Ultrasonics,Ferroelectrics,and Frequency Control,2014,61(10):1638-1650.
[9] 孙亚杰,高艺,薛瑶环,等. 相控阵超声监测成像与直方图匹配图像增强实验研究[J]. 传感技术学报,2015,28(1):86-92.
[10] 孙亚杰,姜剑,张永宏. 基于模糊集的相控阵超声监测成像图像增强研究[J]. 传感技术学报,2014,27(11):1522-1526.
[11] 李健,郭薇,杨晓霞,等. 超声相控阵检测 CFRP 缺陷识别方法[J]. 天津大学学报(自然科学与工程技术版),2015,48(8):750-756.
[12] 高鹏,李法新. 非线性超声相控阵无损检测系统及实验研究[J]. 实验力学,2014,29(1):1-11.
[13] 焦志海,陈晓冬,李莹,等. 高精度数字波束合成的内镜超声相控阵成像[J]. 光电工程,2015,42(3):28-32.
[14] Sagdiev R K,Denisov E S,Evdokimov Y K,et al. Phased Array Based Ultrasound Scanning System Development[C]//IOP Conference Series:Materials Science and Engineering. IOP Publishing,2014,69(1):1-6.
[15] 孙芳,曾周末,王晓媛,等. 界面条件下线型超声相控阵声场特性研究[J]. 物理学报,2011,60(9):435-440.

李杏华(1976-),男,江西南昌人,博士,天津大学副教授,硕士生导师,主要从事图像跟踪、硬件处理、海量数据存储与传输技术、超声检测技术的研究,li.xinghua@126.com;

江尚良(1991-),男,福建龙岩人,在读硕士研究生,主要从事硬件处理、超声检测技术的研究,jiangshangliang@tju.edu.cn。
Research on Phased Array Ultrasonic System with High-Precision Beamforming*
LIXinghua1*,JIANGShangliang1,LIUQuanli2,WANGXue2,SUZhikun1
(1.State Key Laboratory of Precision Measuring Technology and Instruments,Tianjin University,Tianjin 300072,China;2.China Petroleum Natural Gas Pipeline Scientific Research Academy,Langfang Heibei 065000,China)
In order to deepen the study on features of girth weld defects of pipeline,full control of excitation signal parameters and access to the received echo-signals should be provided. A phased array ultrasonic testing system was designed with 32 analog channels,which can connect 128 elements and run at the condition of 125 Msample/s(Million Samples per Second)digitalization frequency. Pipelined delay was adopted,which can realize fractional delay. The impulse transmission delay accuracy is 2.5 ns. Master-Slave management mode was used. Thus,the device can allocate resources reasonably,and high-precision digital beamforming can be realized by doing linear interpolation for echo data and saving the data after interpolating according to the delay scheme of pulse. Hilbert transform is adopted to extract envelopes of synthetic ultrasonic signal. After comparing signal to noise ratios(SNR)before and after filtering by FIR filter,it can be found that SNR after filtering is 9.4 dB higher. Moreover,a defect detection experiment was made toward the standard test block. The result shows that the defect position relative error in depth is 1.7%,which is nearly twice as high as that of the existing system.
phased array;beamforming;delay;FPGA
项目来源:国家自然科学基金项目(51375338)
2016-08-15 修改日期:2016-11-30
TP274+.2
A
1004-1699(2017)03-0471-06
C:7220
10.3969/j.issn.1004-1699.2017.03.023
猜你喜欢
煤气与热力(2021年3期)2021-06-09
化工管理(2021年7期)2021-05-13
成都信息工程大学学报(2021年6期)2021-02-12
自动化仪表(2020年10期)2020-11-13
舰船科学技术(2020年3期)2020-04-22
电子制作(2019年14期)2019-08-20
通信技术(2019年3期)2019-05-31
电子制作(2019年24期)2019-02-23
现代防御技术(2016年1期)2016-06-01
船舶力学(2015年6期)2015-12-12
