
影响航空TDICCD相机分辨率的分析
2017-04-10 08:09
中国设备工程 2017年7期
(海军航空工程学院青岛校区,山东 青岛 266041)
影响航空TDICCD相机分辨率的分析
许兆林,刘建东
(海军航空工程学院青岛校区,山东 青岛 266041)
长焦距、高分辨率的航空TDICCD相机是航空侦察发展的方向之一。根据扫描反光镜航空TDICCD相机的特点,分析研究了反光镜稳定精度、大气压力和温度、速高比引入误差和调光控制等对摄影分辨率的影响。采用恒温恒压舱、自动调焦调光和速高比自动引入等技术,可提高航拍时长焦距TDICCD相机的分辨率。
像元分辨率;稳像;环境;速高比;调光
分辨率是评价航空摄影成像质量的一个重要指标,胶片型与CCD数字型航空相机用不同含义的分辨率表示。航空CCD相机用像元分辨率来定量评定其几何分辨率。像元分辨率是指CCD的一个像元对应地面尺寸的大小。其表示式为:

式中:PR——像元分辨率;H——高度;f——镜头焦距;a——像元尺寸。
从公式(1)可以看出,航空摄影要提高地面像元分辨率,就要增大镜头的焦距和减小像元的尺寸。增大镜头的焦距,相机重量增加;而减小像元尺寸会导致灵敏度的降低,因此,应综合考虑。由于采用时间延迟积分的TDICCD传感器,航空TDICCD相机空中摄影时对一个目标可进行多次曝光,使积分时间增加;因此可采用相对孔径小的镜头,解决了镜头因焦距长重量增加的问题。长焦距航空TDICCD相机成像时地面景物通过扫描反光镜摆扫、通过镜头成像在TDICCD成像面上,从而实现对地面景物大范围的扫描成像。有很多因素影响着航空TDICCD相机获得高分辨率的图像。本文对影响航空TDICCD相机分辨率的反光镜稳定精度、大气压力和温度、速高比误差和光量误差等因素进行了分析和研究。
1 扫描反光镜稳定精度的影响
在航空摄影系统中,图像的高度稳定性对摄影分辨率具有决定性的作用。目前国内外均采用像稳定技术来解决这一问题。长焦距航空相机由于体积大而重,不适合整体稳定的方法,即不适合将相机整体安装在稳像平台上,而是采用反光镜局部稳像方式,如图1所示,设计的稳像平台一般采用多闭环的复合控制方案,将电流环、转速环、稳像环以及位置环组合起来形成多回路系统,其中稳像环回路是反光镜稳像平台控制系统中的一个最重要环节。稳像环回路的设计基本上都还是采用了经典的速率陀螺稳定技术,各种改进的方法都是在基本稳定回路的基础上,针对系统中某种影响较大的因素加以补偿。速率陀螺稳定是利用两个速率陀螺来测量横滚、俯仰和偏航方向上的空间角速度,在曝光过程中,反光镜稳像平台通过速率陀螺获得系统光轴的偏移信息,其输出电压经控制电路、功放电路送给力矩电机,控制反光镜旋转,消除影像前移、横滚、俯仰和偏航的影响,达到图像高度稳定的目的。
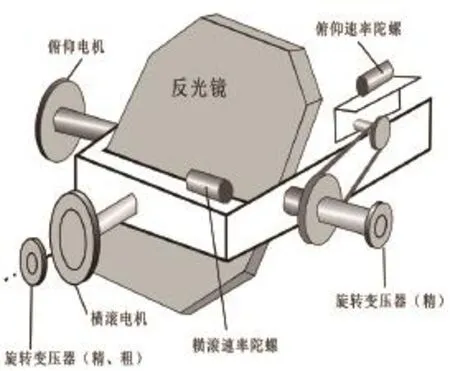
图1 反光镜稳像平台系统
因此,反光镜稳定精度对成像质量有较大影响,这个精度可以由像元尺寸与镜头焦距来决定。当曝光时反光镜将像点稳定在一个像元尺寸之内,其稳定精度较高;反之,稳定精度较低。焦距大的镜头比焦距小的镜头对稳定精度要求高。例如,焦距450mm,像元尺寸9mm,要求其稳定精度不低于20mrad。而焦距900mm,像元尺寸9mm,要求其稳定精度不低于10mrad。要想提高稳定精度,必须找出影响稳定精度的原因,加以解决。影响反光镜稳定精度的因素主要有以下几方面:外部产生的干扰力矩以及执行部件自身产生的力矩波动;陀螺产生的漂移以及安装误差;电源以及稳定环节输入信号带来的误差等,这些对设计安装环节提出更高指标要求才能获得高的稳定精度。
2 环境的影响
航空TDICCD相机摄影时受大气压力和温度等的影响,使其成像分辨率下降。拍照高度变化,大气压力发生改变,空气折射率随着变化,使焦距改变,离焦量变化可根据公式(2)计算:

式中:p——大气压力;0p——标准气压;an——空气折射率;gn——玻璃折射率。
环境温度变化,镜箱热胀冷缩,镜头玻璃的曲率半径也发生变化,产生温度离焦,离焦量公式为:

式中: α——线膨胀系数 ;
φ——温度变化1℃镜头的离焦系数;
ΔΤ——温度变化量。
摄影时,大气压力和温度发生改变都使离焦量增大,造成成像模糊,降低摄影分辨率。解决大气压力和温度对TDICCD相机分辨率影响的方法最好是采用恒温恒压舱,使相机在温度和压力不变的舱里工作,也可采用调焦方式消除离焦量。
3 速高比误差的影响
航空摄影时,像移速度与速高比有关。为保证成像质量,TDICCD驱动时序电路的工作频率与像移速度严格同步。对于TDICCD器件,它的工作原理是:某行某一列的第一个像元在第一个光积分时间内的电荷并不输出,而是移向同列第二个像元并与第二个像元在第二个积分时间内的电荷包相加,最后一行的像元集中了本身和前面所有电荷包。可见TDICCD输出信号的幅度是多行电荷包的累加,其积分行数分为8、16、32……等级数M,这样TDICCD输出幅度比普通CCD扩大了8倍、16倍、32倍……。这种工作方式,只有同一列上的每一个像元都对同一目标积分,才能保证图像清晰。
TDICCD相机的控制方式分为沿航迹方向推扫和穿航迹方向摆扫两种。对于沿航迹方向推扫成像是通过飞机的运动完成一幅图像。飞机运动时,像在移动,其象移速度为:

其中:HW/为速高比。如像元尺寸为a,移动一行的时间tΔ(延迟积分时间)与TDICCD的行周期T相等,即:

TDICCD的工作频率:

在镜头焦距和像元尺寸一定时,TDICCD的工作频率与速高比有关。速高比变化时,TDICCD的工作频率也要随着改变。由于工作频率误差很小,而引入的速高比误差较大。
实验室通过改变速高比值进行试验,见图2,试验表明:速高比误差小于2%,对分辨率影响较小。
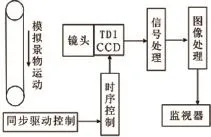
图2 TDICCD室内成像框图
飞机上通过导航系统实时引入相机的速高比,其误差一般都小于2%。但如果人工装订速高比,由于受表头误差和视误差的影响,其速高比装订误差一般都大于2%,因此,拍照时减小速高比引入误差,可提高摄影分辨率。
4 光量的影响
入射在TDICCD像元的照度和积分时间之乘积是光量。调光时TDICCD像元的电荷包饱和会自动溢出流入衬底或向邻近像元泄溢而产生晕光现象,造成影像模糊;电荷不足则引起信噪比(NS/)下降,进而降低分辨率。实验室通过对分辨率板在不同光量时的测试,得到的结论是:光量正确时,分辨率最高;光量比正确时增加或减小1倍、2倍、3倍,分辨率则下降5%、10%、20%。因此,进行调光控制获得正确光量是提高分辨率的一个重要措施。
在航空TDICCD相机中,是采用长焦距、小相对孔径的镜头,根据调光方程:

式中:0H——CCD像元的光量;τ——镜头的透过率;fD/——相对孔径;L——地面景物的亮度;t——快门时间。对TDICCD,快门时间是指对某一个目标进行M次见光的时间。

(6)代入(5),整理得:

(7)式中,0H对应TDICCD正确光量为某一定值,τ、a、f对TDICCD相机也为一定值,fD/随速高比HW/、景物亮度L和级数M变化。在相机自动调光控制中,级数M一定,fD/自动改变大小。图3是自动调光控制原理框图,景物的亮度L通过测光元件获得,引入飞机HW/;计算机根据景物亮度和HW/控制光圈的大小,以获得正确光量。
V476
A
1671-0711(2017)04(上)-0130-03
猜你喜欢
中国交通信息化(2022年8期)2022-10-28
诗歌月刊(2022年2期)2022-03-15
摄影与摄像(2021年12期)2021-10-01
艺术品鉴(2021年21期)2021-08-15
中国交通信息化(2020年5期)2021-01-14
锦绣·上旬刊(2020年3期)2020-06-08
中国交通信息化(2019年4期)2019-07-13
电子制作(2017年17期)2017-12-18
美与时代·城市版(2016年12期)2017-04-26
第二课堂(课外活动版)(2015年3期)2015-10-21
