
基于路口的VANETs路由道路连通性预测方法综述
2017-04-10 03:40蔡震
山东工业技术 2017年7期
蔡震
摘 要:车辆自组织网络(VANETs)路由中,基于路口的地理路由协议能很好的适应城市VANETs的环境,其中道路连通性预测在路由协议中具有决定性的作用,本文分析并比较了经典VANETs路由協议中采取的各种道路连通性预测方法的工作机制和优缺点,最后进行总结和展望。
关键词:VANETs;道路连通性预测;交通路口
DOI:10.16640/j.cnki.37-1222/t.2017.07.105
1 引论
相较于MANETs(Mobile Ad hoc Networks, MANETs),VANETs(Vehicular Ad hoc Networks,VANETs)因本身移动车辆作为网络节点的特殊性,有两点不同。首先,车辆移动速度快,网络拓扑结构也随之变化频繁。再者,车辆之间的信号通讯会受到城市中道路间距离以及建筑物影响,节点间信息只能沿道路传输。故MANETs中的众多成熟的无线网络路由算法无法有效的应用到VANETs的特殊环境[1-3]中。于是一种基于城市交通路口的自组织路由机制展现了优势,其主要工作机制如下:当数据包在直路上传送时,其还沿用无线自组织网络路由经典的贪婪转发策略向前发送数据包,当数据包到达路口区域的车辆节点时,再根据实际情况来决策路由线路,即沿哪条道路继续传送数据包。
道路路由决策主要判定因素有如下两点:其一,下一路口距离目的节点的实际距离长短;其二,未来道路网络连通性或数据包传输延迟时间的大小。目前的交通车辆普遍装备了卫星定位系统(GPS)和城市电子地图,可以来完成到目的节点实际距离的计算。所以,如何预测道路的连通性成为了VANETs路由协议的一个重点问题。
2 道路连通性预测方法
对于道路连通性预测计算主要分为两大类,一是通过获取第三方(如谷歌地图)提供的实时路况信息(如车流量、平均车速),再结合道路数据(如长度、曲度)建立道路连通性模型,计算连通性概率和传输延迟时间,进而选择路由线路;二是通过车辆间定时的“hello”信息交换,得到当前道路的实时网络拓扑,以此来选择路由线路。以下将介绍VANETs经典路由协议中的道路连通性预测方法。
2.1 VADD
VADD[4]在路口节点进行路由决策时,其采用第三方提供的道路车辆密度和车辆平均速度等信息建立道路数据包延迟时间预测模型,公式如下。
当车辆平均间距小于R时,延迟时间被视为数据包多跳传输所需的时间可以忽略不计;当大于R时,要考虑某时刻没有后继节点进而当前节点车辆暂时携带数据包继续行驶的情况,即对于平均车速快、车辆密度高的道路,其延迟时间也相对较小。
VADD相对于其它路由协议,拥有更高的传输率,但是道路延迟时间预测模型采用的是第三方提供的统计数据,对于VANTEs中节点车辆位置变化频繁的特点。
2.2 SADV
SADV[5]在道路选择时,SADV采用了相邻路口的静态节点之间定时发送控制包以测量延迟时间的方法(Link Delay Update, LDU),把一个时间段内此道路上控制包的平均传输延迟时间作为路由道路选择的参考。
SADV相对于VADD,其数据来源是实际测量出来的,实时性和准确性相对提高。但因为静态节点之间的定时控制包交互,增加了网络负载,且在每个路口部署静态节点在目前现实中可行性不高。
2.3 VVR
VVR[6]类似于距离矢量路由,VVR中道路上每个车辆节点通过多跳的定时“hello”信息交换获得当前道路的连通性,即每个节点可知自己是否与两端路口连通,如连通下一跳节点是谁。
VVR的道路连通性预测基于道路实时信息,在查询多跳链接通路的时候,实时性效果最佳。但正如距离矢量路由一样,VVR存在着慢收敛的问题,即能连通的“好消息”传得快,链接中断的“坏消息”传的慢,致使新路由可能与旧路由发生冲突,甚至产生回路。
2.4 GyTAR
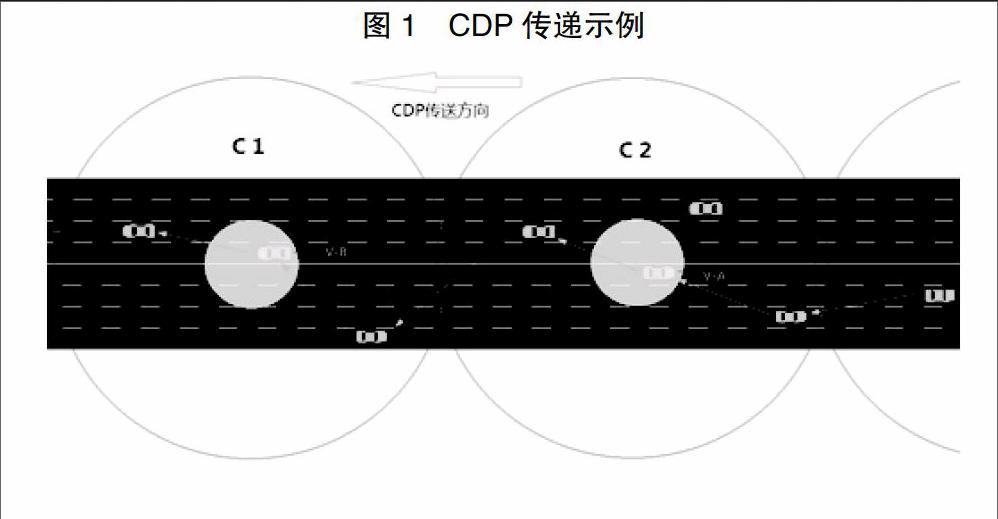
GyTAR[7]采用了一种比较新颖的道路连通性预测方法,其将需要预测的道路分成若干区域,区域中心位置的组头车辆会将本区域车辆的数量依次加到一个名为CDP的控制包中,传送回上一路口(如图1)。
图1 CDP传递示例
处于路口的节点在收到CDP后,通过其中包含的各个区域的车辆数量以及道路长度为每个备选路口方向计算出一个分数,以此来进行道路选择。分数高的道路即离目的节点距离短、车辆密度高,且各区域车辆数偏差小的道路将会被选择,其计算公式如下。
GyTAR增加了对道路车辆密度均匀性对于连通性影响的考量,有效防范了道路上车辆分布“中空”的情况。但其在CDP发包车辆的选取上也存在漏选的现象,这样会导致CDP发送间隔偏差较大,用于计算连通性的车辆密度信息的实时性并不稳定。同时CDP作为控制包的每一次传输都会给道路产生一定的负载。
3 总结
(下转第130页)
(上接第120页)
本文介绍了VANETs路由协议中经典的道路连通性预测方法,大致分为通过第三方交通信息和车辆间交换实时信息建立预测模型两种方法,如何设计一种在实时性和网络负载上均表现出色的道路连通性预测方法是我们未来工作的重点。
参考文献:
[1]张国庆等.城市场景下VANET路由协议大规模仿真研究[J].计算机仿真,2009,26(08):249-252.
[2]雷亚星.城市环境下基于地理位置信息的VANET路由协议的研究[D].北京邮电大学,2011.
[3]胡畔.城市环境下基于位置的车载自组网路由协议研究[D].武汉理工大学,2014.
[4]J.Zhao et al.,“VADD: Vehicle-Assisted Data Delivery in Vehicular Ad Hoc Networks,”IEEE INFOCOM 06, pp.1910(22).
[5] Y. Ding et al.,“A Static-Node Assisted Adaptive Routing Protocol in Vehicular Networks,” ACM VANET 07, pp. 59-68.
[6] H.Lee et al.,“Virtual Vertex Routing (VVR) for Course Based Vehicular Ad-Hoc Networks”, IEEE WCNC?07, pp.4405-10.
[7] M. Jerbi et al.,“An Improved Vehicular Ad Hoc Routing Protocol for Urban Area,”IEEE ICC 07, pp. 3972-79.
