
分析模糊自适应PID控制器的设计及应用
2017-04-10 11:57王忠超
山东工业技术 2017年7期
摘 要:基于目前模糊自适应PID控制器设计应用过程中存在的问题影响,文章分析了模糊自适应PID控制器设计应用现状与优化设计过程,并提出了设计技术作用于系统仿真方式方法,其目的是为相关建设者提供一些理论依据。
关键词:模糊模型;PID控制器;MATLAB/Simulink环境;系统仿真分析
DOI:10.16640/j.cnki.37-1222/t.2017.07.007
0 引言
随着我国市场经济发展进程的不断加快,工业建设用户对PID控制器的应用效果需求越来越大。然而,传统的PID控制方式,已经不能满足参数整定要求。针对这一问题,相关建设人员应从PID控制器设计应用现状出发,以优化模糊自适应PID控制器的设计过程,从而作用于实际环境下系统的仿真分析。这是促进现代化经济建设背景下工业快速稳定发展的关键,相关建设人员应将其重视起来。
1 模糊自适应PID控制器设计应用现状
PID控制已经被广泛应用于工业建设中,然而,传统的PID控制要想保证良好过程模型与在线寻找,比较困难,即使是插入测试信号,也会存在一定程度的干扰问题。这种情况下,PID参数自整定在工业发展中就难以发挥出持续的自适应控制作用。此外,PID控制器也不能区分干扰或是过程动态特性带来的影响。由此可见,虽然PID控制的应用范围广,但因其自身限制,使得难以满足当前工业快速发展背景下的用户需求。在模糊控制方面,目前,其仍处在人工经验的基础上,这就使得对其得定义只能从广义角度出发。即是以模糊理论、模糊语言以及推理作为基础控制方法的。经实踐证实,其最大优势主要体现在适应性好,但其对输入量的处理是离散状态的。这就意味着其无法进行积分或是消除误差操作[1]。为此,相关建设人员应将现有的科学技术成果充分利用起来,以满足用户对模糊自适应PID控制器的设计应用需求。
2 模糊自适应PID控制系统设计过程
首先,设计人员要明确模糊PID控制系统应用的性能要求。即在目前控制系统建设规模不断扩大的情况下,PID控制器较强的自适应性存在难以实现参数整体问题。例如,当系统的参数发生变化,其控制能也会随之出现较大的变化,从而导致控制特性出现偏差,严重的甚至会降低系统作用的稳定性。而自适应模糊PID控制器的设计,是对其变化进行在线校正的有效研究,其需结合传统的控制理论,形成自适应模糊PID控制器,从而实现控制器参数自动整定的设计目标[2]。
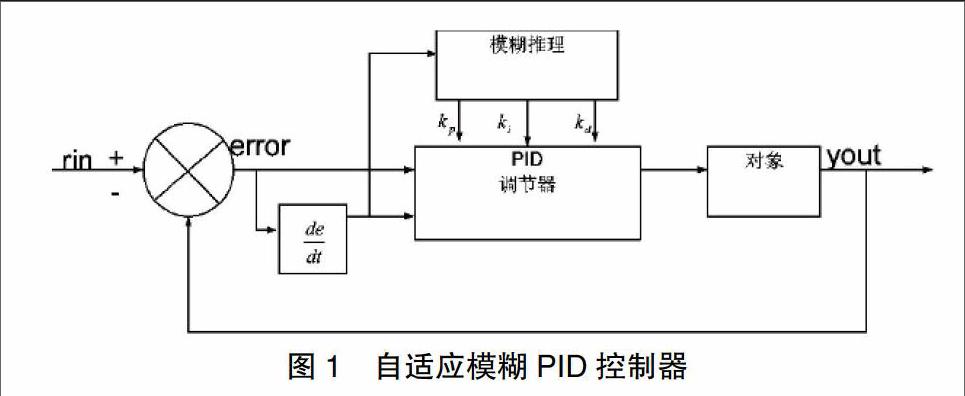
其次,分析系统结构组成。参数自适应模糊PID控制系系统是由模糊控制与参数可调PID系统共同组成。具体结构组成,如图1所示。
其次,PID控制器算法应用,主要根据如下公式进行计算。其中u(t)为,控制器的输出量,e(t)误差信号,ec(t)为误差变化率,而Ki、Kp、Kd分别为,积分系数、比例系数以及微分数。
最后,对于PID参数的自整定规则,则应采用最为精确的数学模型以及按照人工控制规则来建立控制决策表。这样一来,就能根据决策表来设置控制量的大小。此外,当系统产生误差时,控制器就会立即发挥出相应的控制作用[3]。
3 模糊自适应PID控制器系统仿真分析实例
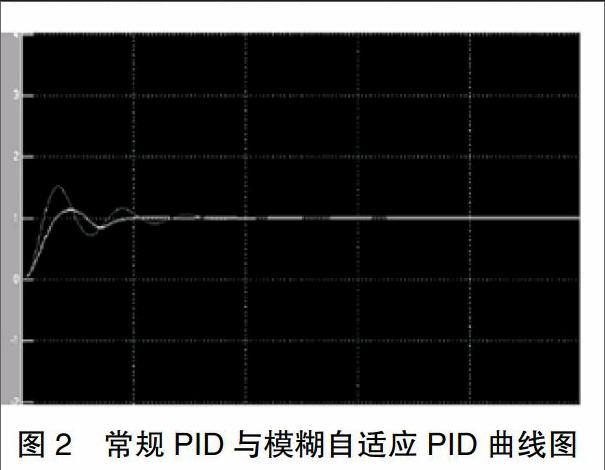
模糊自适应PID控制器设计人员,对MATLAB/Simulink环境条件下,进行了系统仿真分析。首先,设计人员应确定模糊控制器类型与结构。具体来说,就是利用运行Fuzzy 函数,分别取max和min的方法,确定选用Mamdani型的控制器。其中仿真合成方法为max,仿真推理方法为min,而去模式化,则是应用重心平均法。即通过选择Addinput与Ad-doutput选项,来确定模糊控制器的结构,即:三输出、两输入。为建立起FIS系统文件,设计人员除了好确定好输出与输入的变量名,还要将文件保存为 PID.fis格式。其次,编辑出隶属函数和对应模糊控制的规则。具体来说,就是通过输入“mfedit”或者在FIS编辑器双击图标,来激活隶属度函数编辑器,从而选择Add mfs。而后,在以此输入:e,ec,kp、ki 和 kd,即双击模糊控制的规则图标,打开El,就能将相应的控制规则,输入到系统中[4]。最后,对系统仿真结构进行分析,如图2所示,为常规PID与模糊自适应PID相应曲线。
由图中可以看出,与传统的PID控制相比,模糊自适应PID控制器设计应用,不仅能够大幅度减少超调量,还能具备抗干扰能力、稳定性高以及实时性高等功能。因此,工业建设发展研究人员应不断对模糊自适应PID控制器的设计进行了完善,从而满足日趋多元化的市场环境需求。
4 结束语
总体而言,模糊自适应PID控制器的设计应用不仅能够实现降低超调量的控制目标,还能提高系统作用的稳定性、实时性以及抗干扰能力。为此,研究人员应在明确模糊PID控制系统应用的性能要求、分析系统结构组成以及相关算法的情况下,来满足工业发展对PID控制器的自动化需求。
参考文献:
[1]田烈余,洪刚,李卫华.模糊自适应PID控制器在型材冷弯机送料机构的应用[J].液压气动与密封,2011(01):10-13.
[2]邹云峰,邹静波.基于FPGA的温度模糊自适应PID控制器的设计[J].科技创新导报,2011(05):121-123.
[3]杨菲,巴力登.基于MATLAB的模糊自适应PID控制器的设计与仿真[J].信息与电脑(理论版),2011(09):59-60.
[4]许红,李著信,李媛媛,龚利红,刘泽山.基于模糊自适应PID控制器的差压式管道检测机器人速度控制系统设计[J].化工自动化及仪表,2014(09):1019-1022.
作者简介:王忠超(1988-),吉林农安人,本科,初级职称,研究方向:模糊PID 。
