
基于UPFNN的油田机采工艺动态演化建模
2017-04-01 00:04王坎辜小花高论李太福杨利平
现代电子技术 2017年5期
关键词:神经网络
王坎 辜小花 高论 李太福 杨利平


摘 要: 采用建模发现油田机采系统的潜在规律,再利用该规律优化获取机采系统的最佳决策参数,对解决机采系统效率低、能耗大等问题具有重要意义。然而,机采系统受机械、地层、人为等不确定因素的影响,难以掌握其生产参数、环境变量与系统性能之间的变化关系。为此,提出无迹粒子滤波神经网络,并用其建立机采系统的动态演化模型。该方法将无迹卡尔曼滤波作为重要性采样密度,直接通过无迹卡尔曼滤波估算状态向量(粒子)的概率密度函数,从而有效提高滤波精度以及建模精度。通过对某油田机采系统的数据样本实验,表明该方法提高了机采模型的精度,并能对动态系统突变实时跟踪,可有效指导机采系统获取最佳决策参数。
关键词: 油田机采; 无迹粒子滤波; 神经网络; 建模精度; 动态演化建模
中图分类号: TN081?34; TP183 文献标识码: A 文章编号: 1004?373X(2017)05?0109?06
Abstract: The modeling is used to discover the potential rules existing in the oil field mechanical plucking system, and the rules optimization is used to acquire the optimum decision parameter, which have the important significance to solve the problems of low efficiency and high energy consumption of the oil field mechanical plucking system. The mechanical plucking system is influenced by the uncertain factors such as the machinery, geological environment and artificial intervention, so it is difficult to master the change relationship among the operation parameter, environment variable and system performance. Therefore, a dynamic evolution model for the mechanical plucking system based on unscented particle filter neural network (UPFNN) is proposed, which takes the unscented Kalman filtering as the important sampling density. The probability density function of the state vector (particle) is estimated with the unscented Kalman filtering to improve the filtering accuracy and modeling accuracy effectively. The data samples experiment of a certain oil field mechanical plucking system was conducted. The results show that the method has improved the accuracy of the mechanical plucking model, can track the dynamic system mutation in real time, and guide the mechanical plucking system for acquiring the optimum decision parameter.
Keywords: oil field mechanical plucking; unscented particle filtering; neural network; modeling accuracy; dynamic evolution modeling
0 引 言
油田機采设备中抽油机以其结构简单、制造成本低、耐久性好、维修方便等优点,成为我国油田机械采油的最主要方式,但其效率低下,存在巨大的能源浪费问题[1?2]。优化生产、节能增效对油田生产具有重要意义。目前,抽油机优化的方法主要有两种:研发新型节能抽油机或其配套装置[3?4];改变现有生产策略如参数优化[5]、变频[6?7]、间抽[8]等。然而,研发新型设备周期长、投资大,油田生产的干扰大,难以满足工况实时变化的问题;采用抽油机操作参数优化改变现有生产策略是提升现有抽油机装置运行效率,降低能耗,投资省、见效快的首选,但前提是必须建立精确可靠的过程优化模型。
目前,建模常见的方法有机理模型、数据统计模型。机理模型一般通过分析生产的能量传递、运行机构机理等并通过一定假设建立不同部件的物理模型,再组合成整个系统的模型[9],建模过程困难。基于数据统计的模型,通过建立输入参数和输出参数之间的函数关系,寻找数据之间的相关性,可有效避免机理分析过程复杂性和未知性问题。如基于径向基神经网络(Radial Basis Function Neural Network,RBFNN) 预测油层储藏性质[10];利用BP神经网络(Back Propagation Neural Network,BPNN)对抽油机系统进行辨识[11];利用广义回归神经网络(Generalized Regression Neural Network, GRNN)实现抽油机工艺过程的建模[12];利用无迹卡尔曼神经网络(Unscented Kalman Filtering Neural Network,UKFNN)建立工业过程的动态演化模型等[13?14]。
然而,利用BPNN,GRNN,RBFNN等建模,通常假设抽油机系统或工业系统处于平稳状态下生产,计算所得网络结构参数如权值、阈值等固定,自适应性差,对油田机采系统存在时变性的过程建模效果欠佳;利用UKFNN具有突变状态跟踪能力的神经网络可以实现对复杂动态工艺的在线跟踪。但是UKF采用高斯分布来逼近系统状态的后验概率密度,且抽油机工艺状态随着环境、设备磨损老化等影响其后验概率密度呈现非高斯特性,以致UKF训练神经网络模型参数将产生极大的误差。如何针对动态非线性、非高斯的随机系统建立高精度模型成为研究关键。
无迹粒子滤波器(Unscented Particle Filter,UPF)是一种通过UKF计算粒子滤波(Particle Filtering, PF)[15?16]的重要性密度函数形成高精度滤波算法,其有效避免非高斯系统UKF估计精度问题,PF粒子概率密度难以获取的问题。为此,本文提出利用UPF训练神经网络参数,构建无迹粒子滤波神经网络(Unscented Particle Filtering Neural Network,UPFNN),并用来建立抽油机工艺的动态演化模型,使得模型满足动态、高精度要求,该模型可以作为抽油机工艺操作条件优化的基础模型。
1 基于UPFNN的复杂工艺建模
1.1 UKF训练神经网络参数问题分析
神经网络具有强大的非线性拟合能力,在各种复杂的工艺过程具有较好的建模特性。由于常规神经网络权值、阈值固定,自适应差,难以满足抽油机采油等生产过程动态变化的特性;利用UKF不断对神经网络的权值和阈值进行动态调整的神经网络方法被广泛应用于实际生产过程建模。
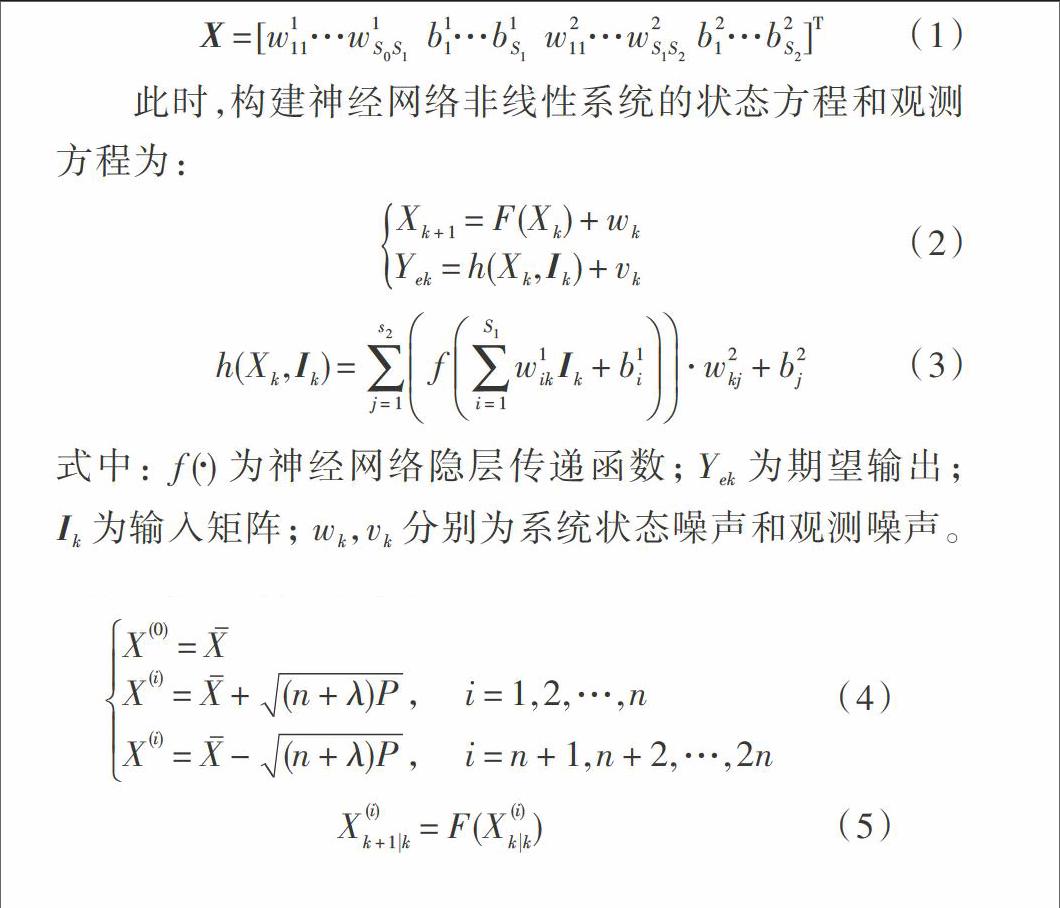
设三层前馈神经网络,记[S0]为输入层神经元,[S1]为隐含层神经元数,[S2]为输出层神经元。网络输入层到隐层神经元的连接权值为[w1ij,]阈值为[b1j]以及隐层到输出层神经元的连接权值为[w2jk,]阈值为[b2k,]其中[i=1,2,…,S0;][j=1,2,…,S1;][k=1,2,…,S2。]神经网络中所有权值和阈值组成的状态变量为:
式中:[f(?)]为神经网络隐层传递函数;[Yek]为期望输出;[Ik]为输入矩阵;[wk,][vk]分别为系统状态噪声和观测噪声。
由式(1)~式(3)可知,UKFNN是将神经网络转换成非线性系统,并通过UKF估计其状态变量达到训练神经网络参数(权值、阈值)的目的。根据式(3)所示神经网络观测方程,其预测值精度由状态变量[X、]网络输入变量[I]共同决定,同时状态变量[X]变化趋势受到样本输入变量[I]的影响。在实际现场生产中,抽油机系统受到环境、地质、人为等因素影响,获取的生产样本数据噪声较大,且噪声呈现非高斯分布,可知抽油机系统的神经网络模型状态变量噪声也呈现非高斯分布。然而,利用UKF估计非线性系统状态,以UT变换为基础,通过Sigma高斯采样并经过非线性函数映射来对状态向量的概率密度函数进行近似化:
由式(4),式(5)可知,由于UKF的采样方式决定其对状态噪声呈高斯分布的系统估计精度较高,而对状态噪声呈非高斯分布的非线性系统进行状态估计存在较大的误差[17]。为此,利用UKF训练抽油机系统的神经网络模型参数存在一定限制。
粒子滤波是一种基于随机采样的滤波方法,主要解决非线性非高斯问题。该方法利用状态空间中一系列加权随机样本集(粒子)近似系统状态的后验概率密度函数,避免了UKF解决非线性滤波问题时随机量必须满足高斯分布的制约条件,其适用于任何环境下的任何状态转换或测量模型。但是,粒子滤波不可避免地出现粒子退化现象。为此,通过UKF计算粒子的重要性密度函数形成无迹粒子滤波器(UPF),该算法对高斯随机变量的均值和方差可以精确到三阶水平。同时可在一定程度上避免UKF估计的高斯分布采样限制以及PF粒子概率密度難以获取导致粒子退化等问题,可有效提高非线性方程的非高斯噪声状态估计值精度。为此,本文提出利用UPF估计神经网络模型非线性方程状态变量以达到提高神经网络模型精度的目的。
1.2 UPFNN高精度动态演化建模算法设计
针对式(1)~式(3)的神经网络非线性系统方程,利用UPF对系统进行状态估计[18],其具体实现步骤如下:
(1) 初始化,针对粒子滤波器设置粒子的数目[N,]并对[N(x0,P0)]抽样,得到初始粒子集[xi0i=1,2,…,N,]并设粒子的权值皆为[1N。]
(2) 获取[k+1]时刻的观测变量值[Yk+1]后,利用UKF对每个粒子[Xi0]进行状态估计,得到相应的估计值[Xik+1k]和协方差[Pik+1k]。
(3) 将UKF估计值[Xik+1]和协方差[Pik+1]作为粒子的重要性密度函数进行抽样,得到新粒子[Xik+1]及其概率密度值:
[qXik+1Xik,Yk+1=NXik+1,Pik+1] (6)
(4) 将粒子权值更新,并进行归一化处理:
[ωik+1=ωik×pYk+1Xik+1pXik+1XikqXik+1Xik,Yk+1] (7)
[ωik+1=ωik+1j=1Nωik+1] (8)
(5)根据粒子权值和重采样策略对粒子集[{Xik+1i=1,2,…,N}]进行重采样,从而获取新粒子集[{Xik+1i=1,2,…,N},]并根据新粒子求取状态估计:
[Xk+1=i=1NXik+1N] (9)
根据步骤(1)~步骤(5)进行计算,以最后一次估计得到的系统状态变量作为利用UPF计算得到神经网络的权值、阈值。该方法可以迅速跟踪状态真实值,完成对状态的估计。
2 仿真实验
为验证基于UPFNN动态非线性建模方法的有效性,本文以某油田机采系统为对象进行实验研究。以港510有杆抽油机机采系统2014年12月—2015年9月的数据为样本,建立系统工艺过程模型,以提供操作条件优化的基础模型。
2.1 变量选择与样本预处理
游梁式有杆抽油机(简称抽油机)是油田机采的主要设备,其工艺模型的挖掘对油田生产具有重要意义。通过调研及文献分析发现,抽油机的主要生产性能包括产液量和耗电量,可作为节能增效模型的输出;冲次、有效冲程是否合理与产液量、耗电量有直接的关系,是关键决策参数;含水率、平均功率因数、计算泵效对产液量和耗电量有一定的影响,可作为环境变量;示功图作为工况的重要反映,在建模过程中也是不可或缺的。为此,本文选择冲次、有效冲程、计算泵效、含水率、平均功率因数和示功图主分量作为模型输入,日产液量和日耗电量作为模型输出,模型参数信息如表1所示。
由于油田油水井信息采集平台中,冲次、有效冲程、功率因数、计算泵效以及示功图数据采集周期为20 min,而含水率、日产液量和日耗电量采集周期为24 h。为保证实验数据的一致性,将同一天的多次采样数据取平均作为对应参数当天的样本。最终获得256组样本,部分样本示例如表2所示。
2.2 示功图的主元分量提取
示功图描绘的是采油过程中载荷随位移变化的关系,是机采系统工作状态的直观反映,是分析机采系统工作状态的重要依据。本文获取了一个采油周期的144个载荷?位移值。若这些点全部用于建模会增加算法的复杂度,同时144个点之间存在明显的相关性和冗余性。为此,本文提出首先利用主成分分析方法(PCA)提取示功图主分量。
根据PCA的计算,本文选择特征值累计贡献率达到90%时的所有主元。计算得到PCA提取所有主元中,前5组主分量(B1~B5)对应的特征值、特征值贡献率以及特征值累计贡献率如表3所示。
由表3可知,PCA提取的前2个主分量(B1,B2)的累计贡献率已经达到93.23%,超过设定值。故而认为,前两个主分量(B1,B2)包含了示功图数据的绝大部分特征信息,基本代表了原始特征。故此,本文采用前两个主分量作为示功图数据的特征,并代替原始的载荷数据作为神经网络的输入变量参与建模。
2.3 基于UPFNN的抽油机工艺过程建模
通过2.2节示功图主元分析,可以利用主元分量B1,B2代替144维的原始示功图数据为网络输入环境变量,以降低建模计算的复杂度和冗余度。同时将决策变量冲次、有效冲程以及环境变量计算泵效、平均功率因数、含水率等作为网络的输入变量,将日产液量、日耗电量作为网络的输出,建立神经网络模型:
为了验证UPFNN方法的建模跟踪能力和预测精度,本节将其与UKFNN,BPNN进行比较。实验中按照样本采样顺序,将前80%的样本作为训练样本并验证模型的跟踪能力;后20%的样本作为测试样本并验证模型的预测精度。三种方法得到的样本训练跟踪效果如图1,图2所示,测试样本预测效果分别如图3,图4所示。
在跟踪能力方面,由图1,图2可知在系统工况发生变化时,三种方法的表现差异明显。图1中产液量样本在第94点处个别样本出现小幅波动,BPNN在第94点附近跟踪出现了明显偏差,表现出过冲现象,在第163点样本处剧烈变化,BPNN在此后的样本跟踪方面均表现出较大的偏差,说明其跟踪能力较差;UKFNN,UPFNN在第94点样本点处没有表现出较大差异,但是在第163点处可以看出UKFNN较快响应,但UPFNN效果最好;同样由图2可以看出,在耗电量发生巨大变化时,UKFNN能够跟踪到样本的变化趋势,而UPFNN可以更加精确地跟踪到样本值,在样本突变时表现出更好的跟踪特性。
在预测精度方面,采用相同的测试样本验证三种模型的表现。由图3可知BPNN预测值明显小于实际值,且波动较大;UKFNN能较为准确地预测到大部分产液量样本,但是20~30样本之间预测效果差;UPFNN针对所有的产液量测试样本均表现出较高的预测精度;由图4可知耗电量测试样本期望值波动较大,此时BPNN预测波动也较大,同时整体低于期望值,预测精度差;UKFNN在测试样本波动较大时,其预测精度同样受到较大影响,预测值整体均值大于期望值;然而,UPFNN在波動较大时测试样本表现仍然较好,能够较为精确地预测到测试集期望值。由此可知无论在跟踪能力还是预测精度方面,UPFNN均表现出了较高的精度。
由图5,图6可以看出,BPNN构建的工艺过程模型预测产液量、耗电量误差均较大,而UKFNN,UPFNN构建的模型的预测误差均控制在5%以内;同时由表4的统计结果表明:
(1) 三个统计指标中,BPNN模型的训练样本跟踪能力最强,但是其测试样本的预测精度最差;
(2) UKFNN在训练样本跟踪能力弱于BPNN,但在测试样本预测精度上有了较大的提升;
(3) UPFNN在训练跟踪能力上以及测试样本预测精度上均优于UKFNN,且UPFNN的预测精度在三种模型中最高。
造成上述三种现象的主要原因包括:
(1) BPNN通过训练样本输出指标MSE,达到设定值停止训练,加之各工况样本数量不均衡,导致前期工况的影响权重大于后期工况,使得BPNN的跟踪效果较好,但是预测当前状态能力不强;
(2) UKFNN具有动态演化建模能力,其按照时间顺序的采集样本不断更新模型,使得模型更加符合当前抽油机的系统特性,故而在预测精度上优于BPNN;
(3) 非高斯状态噪声系统利用UPF进行估计,在精度上优于UKF,从而使得UPFNN建模在跟踪能力方面优于UKFNN,且预测精度最高。
由此可知,在跟踪能力以及预测精度上UPFNN建立的复杂工艺的动态模型优于UKFNN,可较好地满足工艺生产过程高精度建模的要求,验证了该方法的有效性和先进性。
3 结 语
本文针对UKF系统状态估计精度问题,提出利用UKF产生PF的重要性密度函数,以保留PF的非线性高精度滤波特性,并对神经网络的权值和阈值进行实时计算,以建立抽油机工艺过程的高精度动态演化模型。通过对UPFNN,UKFNN,BPNN的性能比较实验表明,利用UPFNN建立的抽油机工艺模型精度高,且对抽油机突变状态具有很强的跟踪特性,对提高复杂动态工艺过程动态模型精度给出了有力的条件。如何通过模型获取抽油机工艺的最佳操作变量,使得抽油机高效、节能的运行将是下一步的研究重点。
参考文献
[1] WANG S L, ZHOU T J, LONG P, et al. Analysis and countermeasures on the efficiency of the pumping wells system in the old oil?field [C]// Proceedings of 2013 SPE Asia Pacific Oil and Gas Conference and Exhibition. Jakarta, Indonesia: So?ciety of Petroleum Engineers, 2013: 257?266.
[2] 蔡亚,石杰,莫志庭,等.花土沟油田抽油机系统效率的影响因素及对策[J].油气田地面工程,2012,31(3):22?23.
[3] 孙术华.利用数控镗床技术研制新型抽油机机架[J].油气田地面工程,2014,33(5):12?13.
[4] LU J M, HE J P, MAO C X, et al. Design and implementation of a dual PWM frequency converter used in beam pumping unit for energy saving [J]. IEEE transactions on industry applications, 2014, 50(5): 2948?2956.
[5] 陈祥臻,徐小力,朱春梅,等.基于正交试验的抽油机工作效率影响因素分析[J].石油机械,2014,42(12):61?64.
[6] 于剑锋,刘存山.变频调速与能量回馈相结合的抽油机控制系统[J].油气田地面工程,2013,32(8):68?69.
[7] PENG Y, LIU X. Application of variable frequency speed control to beam pumping units based on mechanical properties in mechanical controlling engineering [J]. Advanced materials research, 2013, 648: 365?369.
[8] 关宁,欧阳华章,李华.抽油机低效间抽井产液变化规律[J].油气田地面工程,2006,25(2):17?18.
[9] ZHANG X M, YANG X, GUO Z. Kinematics and dynamics analysis of drive mechanism of parallel four?bar energy?saving pumping unit [J]. Wuhan University journal of natural sciences, 2012, 17(1): 73?78.
[10] LI L, XIONG W, ZHAN S F, et al. Reservoir property prediction using the dynamic radial basis function network [C]// Proceedings of 2011 SEG Technical Program Expanded Abstracts. San Antonio: Society of Exploration Geophysicists, 2011: 1754?1758.
[11] 晏梦云,张锡宁,吴伟,等.抽油机电液伺服加载系统的神经网络PID控制[J].石油矿场机械,2008,37(11):48?51.
[12] 辜小花,廖志强,李太福,等.面向抽油机节能的GRNN过程建模及工艺参数优化[J].重庆大学学报,2013,36(6):130?136.
[13] 李太福,姚立忠,易军,等.强跟踪平方根UKFNN的铝电解槽工耗动态演化模型[J].自动化学报,2014,40(3):522?530.
[14] 李太福,侯杰,姚立忠,等.Gamma Test噪声估计的Kalman神经网络在动态工业过程建模中的应用[J].机械工程学报,2014,50(18):29?35.
[15] 王法胜,鲁明羽,赵清杰,等.粒子滤波算法[J].计算机学报,2014,37(8):1679?1694.
[16] LI T C, GABRIEL V, SUN S D, et al. Resampling methods for particle filtering: identical distribution, a new method, and comparable study [J]. Frontiers of information technology & electronic engineering, 2015, 16(11): 969?984.
[17] 杨丽华,葛磊,李保林,等.强跟踪UKF粒子滤波算法[J].计算机工程与设计,2015,36(9):2432?2436.
[18] MIAO Q, XIE L, CUI H J, et al. Remaining useful life prediction of lithium?ion battery with unscented particle filter technique [J]. Microelectronics reliability, 2013, 53(6): 805?810.
猜你喜欢
现代电力(2022年2期)2022-05-23
装备制造技术(2020年11期)2021-01-26
电子制作(2019年19期)2019-11-23
电子制作(2019年12期)2019-07-16
中国生物医学工程学报(2019年5期)2019-07-16
通信电源技术(2018年3期)2018-06-26
重型机械(2016年1期)2016-03-01
大连工业大学学报(2015年4期)2015-12-11
海军航空大学学报(2015年4期)2015-02-27
电测与仪表(2014年20期)2014-04-04
