无碳重力小车运动分析与转向机构设计
2017-03-29 12:06朱子恒
中国科技纵横 2017年3期
朱子恒
摘 要:无碳重力小车只以给定重力作为动力来源,通过一定的装置将重力势能转换为机械能,驱动小车沿“S”轨迹行驶。小车研制中有关能量转化的途径,以及提高能源利用率的方法,都对将来的能源发展与利用起到明显的促进作用。转向机构是完成小车转向“S”型行驶的关键部位,其设计的好坏,直接决定了小车运动轨迹。
关键词:无碳重力小车;运动分析;曲柄摇杆机构
中图分类号:TP23 文献标识码:A 文章编号:1671-2064(2017)03-0062-02
无碳小重力小车是一种将重力势能转换为机械能的运动装置,具有绿色环保、经济便捷等优点。研究和制作无碳重力小车,有助于人们寻找更加环保的绿色能源,而研制中有关能量转化的途径,以及提高能源利用率的方法,也都对将来的能源发展与利用起到明显的促进作用,无碳重力小车的研制对传统能源有着重大的意义。本文拟在研究无碳重力小车基本情况的基础上,对其运动进行分析,并在转向机构这一关键的部位上进行思考和设计。
1 基本情况
为了便于研究,预设本课题研究的无碳重力小车,满足以下前提条件[1]:小车总质量不超过1Kg,下落重块的质量1Kg(¢50×65 mm,普通碳钢),落差500±2mm,提供重力势能5焦耳。小车仅利用重块铅垂下降产生的重力势能,通过一定装置转化为动能驱动前进。小车整体造型采用三轮设计(一个前轮,两个后轮)。前轮最大外径不小于¢30mm,后轮最大外径¢120mm,且两轮轮距140mm。
无碳重力小车主要由六个部分组成:动力部分、传动部分、控制部分、转向部分、驱动部分和车体部分。其中转向部分决定了小车的转弯的精度以及行驶轨迹,是小车完成转弯避障的关键部分。
2 运动分析
2.1 运动原理
无碳重力小车的基本原理是将重块下降的重力势能转化为小车前进的动能。
设小车质量为M,重块质量为m,下降高度为h,则其重力势能为mgh。重块下降时,其重力势能转化为重块的动能EK1、小车的动能EK2、小车前进时的摩擦及损耗W损,公式表达为:
mgh=EK1+EK2+W损
式中EK1=mv12/2,v1是重块下降的速度,也是驱动轴的线速度;EK2=Mv22/2,v2是同一时刻小车前进的速度,也是后轮的线速度。
设重块下降过程中加速度为a,绳子的拉力为T,有:T=M(g-a)[2],产生的力矩为:M1=λTR驱动轴(λ为考虑摩擦影响而设置的系数),显然,当T一定时,R驱动轴越大,力矩M1越大,R驱动轴越小,力矩M1越小;当力矩M1达到一定的大小保持不变,R驱动轴越小,拉力T越大,重块逐渐减速。
2.2 行驶轨迹
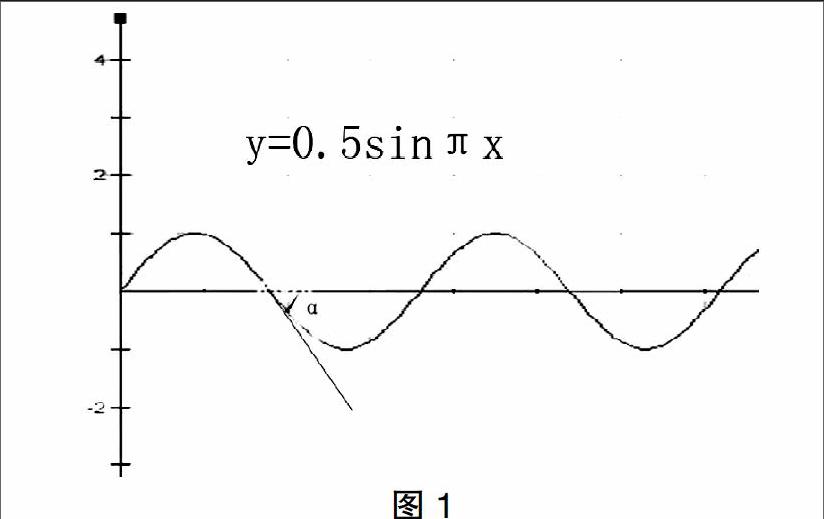
在预设的前提条件下,理论上无碳重力小车行使轨迹为“S”型,满足振幅为500mm的正弦函数y=0.5sinπx,如图1[3]。
无碳小车的转向过程是根据行程来决定的,所以需要知道正弦函数y=0.5sinπx曲线长度L。查阅资料[4]后,计算公式如下:
L=
此积分无法求初等原函数,利用积分的近似计算得:2.92739。
为了保证小车转向的精确,转向轮的行使轨迹也应该要满足正弦函数y=0.5sinπx。显然,只要转向轮在(1,0)点处的切线与x轴夹角与正弦函数y=0.5sinπx在(1,0)点处的切线与x轴的夹角相同,即能达到要求。计算公式如下:
,
所以转向轮与x轴夹角为:。
3 转向机构设计
无碳重力小车具有转向避障的功能,行驶时需要完成多次转向,完成这一功能的是转向机构。在行驶速度均匀的前提下,转向机构必须保证转向轮运动轨迹的曲率是连续变化的,即与x轴的夹角始终满足,才能平稳地在理论轨迹上行驶;否则,曲率改变不平和,小车容易晃动甚至倾覆。转向机构设计的好坏,直接决定了小车运动轨迹。常见的转向机构有以下设计:
3.1 曲柄摇杆机构
曲柄摇杆机构是一种具有一个曲柄和一个摇杆的铰链四杆机构。曲柄为主动件且等速转动,而摇杆为从动件作变速往返摆动,连杆作平面复合运动。曲柄摇杆机构结构简单,两构件间的接触靠本身的几何封闭维持,运动副为低副,单位面积受压力小,面接触便于润滑,产生的摩擦损失小,并且这一机构生产加工方便,容易获得较高的精度;但曲柄摇杆机构的滑动摩擦副使其工作效率较低,容易发生自锁。
一般情况下,曲柄摇杆机构只能近似实现给定的运动规律或运动轨迹。如果要求的运动较多或比较复杂时,需要的构件数和运动副数往往会相应增多,这样反而会使机构的结构变得复杂,工作效率降低,此时,机构对制造、安装误差的敏感性,和发生自锁的可能性也会增加。曲柄摇杆机构做较为复杂的运动时,构件产生的惯性力往往也难以平衡,在高速运动时甚至将引起较大的振动和动载荷,故曲柄摇杆机构常用于速度较低的场合。
3.2 曲柄滑块机构
曲柄滑块机构是一种利用曲柄和滑块来实现转动和移动相互转换的平面连杆机构,运动副为低副,其中滑块与机架构成移动副,连杆构成转动副,构成两元件的几何形状较为简单,容易加工。
为了保证机构无急回运动特性,曲柄滑块机构可以设计为对心曲柄滑块,其中曲柄做等速转动,滑块做前后匀速滑动。曲柄滑块机构本身的特性也可以减小由于小车后轮差速带来的转向误差。但是由于前轮轴到滑块的最小距离点不是左右往复运动的对称点,使得小车前轮在左右摆动时的运动轨迹为倾斜的S形路线[4]。
3.3 凸轮机构
凸轮是具有一定曲线轮廓或凹槽的构件,运动时,通过高副接触可以使从动件获得连续或不连续的任意预期往复运动。凸轮机构可通过推杆实现直线往复运动,并且在凸轮机构的远休止点和近休止点可以实现推杆的间歇性传动。凸轮做等速转动,其转角与时间成正比。
采用这一机构,只需设计适当的凸轮轮廓,便可使从动件得到任意的预期运动。转向机构依靠凸轮的转动带动推杆移动,从而通过转向杆改变转向轮的偏转角度,完成转向。由于凸轮做等速转动,可以获得连续的预期往复运动,转向轮也可以完成左右对称的往复运动。
但是凸轮轮廓的曲线方程计算复杂,而且加工困难、精度低、尺寸不能够随意的修改、重量较大导致能量损失大(滑动摩擦)、效率低,因此不宜选用这一机构。
转向机构一般注重理论设计,理论上具有很强的可行性,但实际行驶中往往会出现转向幅度不足或过大等现象。传统的解决方法是将关键零件重新加工,提高零件加工精度,减小装配误差,如做一些精确的定位基准面,轴与孔相配合的零件进行配做等[5]。但是转向机构即使出现微小的误差,经过误差积累也会使行驶轨迹产生较大误差。因此,机构上的合理设计才是解决这一问题的关键。
在速度均匀的前提下,转向完全的关键是令转向轮运动轨迹的曲率连续变化,因此,曲柄匀速转动,摇杆左右匀速摆动的曲柄摇杆机构应该是最好的转向机构了。
无碳重力小车行驶时转向机构的转角经常超出正常范围,这是因为转向机构中的推杆对转向杆的作用力不受约束[6]。针对这一问题,可以考虑使用弹簧对转向杆进行约束:当转角超过一定的范围时,弹簧将对转向杆产生反作用力。这一过程也会储存一部分机械能,当转换方向时,储存的机械能会作用于转向杆,使转向杆较快到达需要的角度。
参考文献
[1]上海交通大学PRP学生研究论文.以重力势能驱动的具有方向控制功能的自行小车设计[D].上海,2011,3.
[2]王金卫.无碳小车设计说明书[D].2011,24.
[3]上海海洋大学毕业设计.无碳小车的总体设计与模型制作[D].上海,2011,15.
[4]阮凤,周毓,苏国祥,郑志,郑永洲.无动力小车转向机构的研究与分析[J].价值工程,2015,38.
[5]刘洋,姜吉光,謝醇.基于“轨迹分析法”的无碳小车微调机构的创新设计[J].机械传动,2015,39(12):85.
[6]刘润,朱先勇,李志东.基于弹簧约束的无碳小车转向机构的建模与仿真[J].机械设计,2013,30(9):24.