自主创新全地形机器人设计
2017-03-27 14:13张月娇郑雨辰卢亚平
科技创新与应用 2017年4期
关键词:自主创新
张月娇+郑雨辰+卢亚平


摘 要:结合2016江苏省机器人自主创新——探索者全地形机器人大赛,设计出一种可以应对各种复杂地形的三段式关节机器人小车。以段式关节为主题,充分利用弹簧的收缩力和张力,控制整个小车的平衡,实现既分既合的目的。设计的小車能够完整的吻合场景道具,具有较好的创新构想,较好的环境适应行和较高的行动力。
关键词:段式关节;全地形;自主创新
为应付复杂地形,构想设计一种新型结构小车,取名为三段式关节机器人小车。顾名思义该小车有三个独立的运动关节构成,以适应高低凹凸变化的地形,且相互之间又具有整体的牵引力。
1 三段式关节小车设计方法及创新点
共设计三个可以活动的“关节平台”,各“关节平台”之间通过在螺栓上加套筒的方法实现转动自由。同时对三个“关节平台”的转动限制,避免各“关节平台”在运动过程中受的推力不均匀而导致过度弯曲。由此在各“关节平台”之间添加两个弹簧,使各平台之间受到一定的约束力,拉升时受到弹簧收缩力,压缩时受到弹簧的张力,使小车具有较好的柔性、整体性、避震性。如图1所示。
2 三段式关节小车在独木桥优点体现
如图2所示,完全适应高低地形,小车在上坡和下坡过程中,六个轮子都能完好的与桥梁接触,上坡的抬头,下坡的低头。使得小车的六个轮子都能很好的发挥驱动能力,同时保障了在桥梁上良好的直线运动。
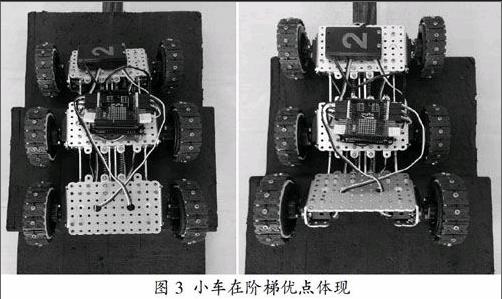
3 三段式关节小车在阶梯优点体现
如图3所示,完全吻合凹凸地形,由于各段式关节可以上下弯曲的特点,也为阶梯的跨越提供了很好的保障。
4 三段式关节小车在栅格优点体现
如图4所示,完全贴和地形,由于小车各关节具有较好的自由度,在行驶栅格时能够完全贴和地形,其每对轮子都能够贴着栅格底部行走,具备较好的避震性。
5 结束语
根据仿生学设计而成,从外形上看小车像一条三节的毛毛虫,各关节之间是利用弹簧连接起来的,利用弹簧的双向作用,能够更好适应环境,从而使小车轻松平稳的走过障碍。车轮方面使用大轮的方案,大轮具有更大的线速度,能使整个小车的速度得到提升,使小车能轻松度过栅栏等障碍,并结合黑标传感器顺利通过全程。
参考文献
[1]袁银瑶,卢亚平.“探索者”全地形机器人创新设计[J].探索科学,2016,34(6):195.
[2]卢亚平,宋天麟.传感器与虚拟仪器实验室建设与教学[J].实验室研究与探索,2015(9):111-114.
[3]卢亚平,宋天麟.应用型本科机电专业实践性教学环节研究[J].职业教育研究,2012(9):115-116.
猜你喜欢
现代商贸工业(2016年22期)2016-12-27
现代商贸工业(2016年11期)2016-12-26
中国广播(2016年11期)2016-12-26
计算机教育(2016年10期)2016-12-19
新教育时代·教师版(2016年23期)2016-12-06
经济师(2016年10期)2016-12-03
艺术科技(2016年9期)2016-11-18