基于Agent的水利水电工程施工场内交通运输仿真研究
2017-03-20 07:05苏贝,宋亮,王帅
水力发电 2017年12期
苏 贝,宋 亮,王 帅
(1.天津大学水利工程仿真与安全国家重点实验室,天津 300350;2.中水北方勘测设计研究有限责任公司,天津 300202)
0 引言
随着系统仿真技术在复杂系统运行中的推广应用[1-3],采用计算机仿真技术模拟施工运输过程成为工程设计人员验证场内施工交通布置可行性的重要方法之一。Agent是具有感知能力、问题求解能力和能够与外界通信能力的智能化实体,对于描述复杂多变的道路状况和交通特征十分有效[4],水利工程施工场内交通运输系统需要充分考虑车辆与车辆、车辆与道路以及车辆与供/卸料点之间的相互作用与影响,Agent技术给水利水电工程交通运输仿真提供了新的思路和方法。
本文通过对水利工程施工场内交通运输系统进行分析,确定各影响因素之间的相互制约关系,运用Visual C#平台开发了水利工程施工场内交通运输仿真系统,对CAD进行二次开发获取道路的三维体形数据、交叉口数据、料源料场数据等,根据土石方流需求完成土石方运输,实现土石方运输的场景的动态可视化仿真,将系统中的道路、车辆、装/卸料点等建立Agent实体,结合改进的车辆跟驰策略,使整个交通运输仿真系统在各个智能体的交互工作中顺利进行。
1 水利工程施工场内交通运输系统分析与Agent技术
1.1 水利工程施工场内交通运输系统
水利工程施工系统通常划分为多个子系统,子系统之间通过交通运输相互联系,例如堆石坝施工系统中的土石方开挖子系统和坝面填筑子系统,需要通过料物运输实现土石方的挖填。水利工程交通运输系统是工程施工的动脉,承担着料物运输的重要任务,对保证工程进度、降低工程造价等具有重要意义。不同于城市交通运输系统,水利工程施工场内交通运输主要组成元素可以划分为道路、车辆、装料点和卸料点四类,各元素之间的联系为车辆选择供料点进行装载后进入道路,行驶至卸料点卸料后空车返回的循环,如图1所示。

图1 各元素关系示意
在系统中车辆与车辆、车辆与道路、车辆与供料点或卸料点、道路与供料点或卸料点之间都存在各种直接或间接的联系与影响。在实际的施工场内交通运输中,人的智能性对系统的影响不容忽视,例如,车辆的行驶是由驾驶员和车辆共同作用,驾驶员在道路行驶中可以根据道路提供的车流状况(与前后车速与车距)、道路状况(坡道、转弯)等信息自动调节行驶的速度,在道路交叉口需要根据情况选择排队等待或继续行进,在供料点可以根据供料点的排队情况选择等待时间最少的供料点排队等。工作人员的主观能动和相互协作在施工运输系统的各个部位都有体现,因此将仿真系统中的元素紧密地联系起来,赋予组成元素智能性,可以更加真实地模拟施工场地内的交通运输情况。
1.2 Agent的结构与特性
Agent是具有交互性和智能性实体,一个完整的Agent是由自治的Agent实体和其所在环境组成,它可以接收外界环境的刺激,做出相应的动作,通过不断交互实现总体目标,结构如图2所示。

图2 Agent系统及其构成
Agent的结构特点使得Agent具有如下5个基本特征[5]:①自治性。除根据外界信息变化产生调整外,还可以自动对自身行为状态进行调整。②主动性。Agent对外界环境的改变,自己主动采取行动的能力。③反应性。对外界的刺激做出相应反应的能力。④社会性。在多个Agent共存的环境中,Agent具有与其他Agent协作的能力。
每一个Agent的行为结构均包含环境信息、感知模块、决策模块及执行模块4个部分。决策模块通过感知模块获取环境信息,进行分析后做出相应的决策并执行,同时,每个Agent的行为在实施时又会对环境产生一定的影响,Agent的完整行为结构如图3所示。
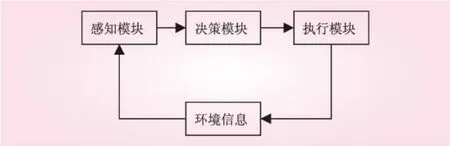
图3 Agent行为结构
分析Agent的结构与特性可以发现,基于Agent技术建立模型符合交通运输系统中各参与者的特性。Agent技术着眼于实体模型的建立,通过模拟各实体的具体特点及相互作用关系实现系统的仿真,MAS是由多个Agent组成的系统,各Agent之间通过通信实现相互协调。根据水利工程施工场内交通运输系统中各个元素特点,搭建出多个特性和功能各不相同Agent结构,Agent之间相互影响,互相协作,可以更好地描述水利工程施工场内运输的动态过程。
2 基于Agent施工场内交通运输仿真模型
通过对水利水电工程施工场内交通运输系统具有的特点及仿真系统的需求进行分析,探讨交通运输仿真中道路、车辆、供/卸料点等要素之间的相互关系,本文建立了基于Agent的水利水电工程施工场内交通运输仿真系统的结构如图4所示。
道路是交通仿真系统中的最基础元素,道路Agent结构体的基本属性包括道路编码(名称)、道路类型(沥青混凝土路面/泥结碎石路面)、单向/双向、车道数量、道路三维形体、道路方向、连接的目的地以及车速限制,感应器可以感知所有在该道路上行驶的车辆的位置信息,分析道路的行车密度以及交叉口排队情况,在可视化平台上动态的显示道路的车流状况。
车辆Agent兼有车辆和驾驶员二者的共同属性,其基本属性包括车辆类型、运载能力车辆状态(重行或空返、正在装卸或等待)、驾驶员特性及土石方流路线。车辆Agent可以感知道路Agent提供的路况信息,通过分析前车速度及距离、转弯或直行、上坡或下坡等因素,决定行驶方式,在行驶至目的地后(供/卸料点),可以获得各供/卸料点的工作状态或排队情况信息,通过分析等待时间选择供/卸料点进行料物的装卸。
供/卸料点Agent的基本属性为该点的料物供应/需求量、当前的工作状态及排队情况。供料点Agent在感应该点在无车辆等待时将进行料堆维护,以减少下次装载料物的时间。
3 水利工程施工场内交通中的车辆跟驰策略
水利施工场地往往在高山峡谷当中,场内交通状况无法与城市道路相媲美,道路的线形组合与衔接很难做到“圆滑”连接,陡坡、急弯路段随处可见。运输车辆在行驶过程中,大约80%以上的信息都是通过视觉获取,因此,视野范围的大小对车辆信息的获取具有十分重要的影响。视野范围受到车辆行驶速度和道路弯曲程度的影响,车速越大或道路弯曲程度越大,驾驶员的视野范围都会变小,当前车减速行驶时在弯道上的跟驰车比在直线上车辆反映更为强烈;当前车加速行驶时,跟驰车的反映变弱,因此车辆在进入弯道前要对车速进行控制,减速通过弯道。在上坡行驶时,为防止前车倒滑,跟驰车会紧随前车车速,受到的刺激时反应更加灵敏,车辆之间的安全间距会需要增大[6]。

图4 交通运输仿真系统基本框架
道路的几何线形对车辆的行驶状态有很大影响,且水利工程施工道路一般都是弯度和坡度相结合,车辆Agent的决策模块中应包含车辆在该种道路上的行驶策略。平纵组合跟驰策略计算公式如下。

式中:l、m、p均为待定参数,根据模型试验进行确定;β为常数,与前车的行驶状态有关,当前车减速时,β>0,当前车加速时,β<0;R为道路曲率半径;R0为满足行驶要求的最小安全半径;vi(t)、vi+1(t)为t时刻前车和跟驰车的速度;Si(t)、Si+1(t)为t时刻前车和跟驰车的位置;λ1与司机的反映时间有关;λ2为坡度对跟驰模型的影响参数,当汽车上坡时,sign()=1,λ2为负,sign()=-1,λ2为正;汽车下坡时,λ2均为正;g为重力加速度;i为道路的坡度。
4 工程实例
某水利枢纽工程位于我国新疆地区,水库总库容17.49亿m3,电站总装机容量670 MW,多年平均年发电量18.74亿kW·h,为一等大(1)型工程。坝址区为典型的V形河谷,场区内大部分山势陡峭、场地狭窄,可供施工布置的场地很少,施工布置条件较差。工程总工期安排为108个月,但由于地处冬季低温、严寒地区,每年的11月到次年的3月为施工停工时间,有效工期约67.5个月,土石方运输总量779.9万m3。
将仿真系统应用于该水利枢纽的水利工程施工场内交通研究中,仿真结果可以获得满足土石流计划的配置装载机械数量及运输车辆数量、各时段内的行车密度及交叉口排队情况。最大行车密度包络线如图5所示,最大小时行车密度为83.3辆/h,根据《厂矿道路设计规范》,小时行车密度均满足最大85辆/h的要求,交叉口最多排队车辆为3辆,动态仿真可视化如图6所示。
5 结论
本文对水利水电工程中的交通运输特点进行了分析,利用MAS技术建立水利水电工程施工场内交通运输模型,给出了道路Agent、车辆Agent、供料点Agent及卸料点Agent的行为结构,实现了水利工程各元素之间的相互联系与作用关系。改进后的车辆跟驰策略能够充分利用道路的三维信息,更加符合工程实际。水利水电工程施工场内交通仿真系统可以实现动态的交通可视化,仿真结果合理有效,可为施工组织设计提供参考,对工程建设具有指导意义。
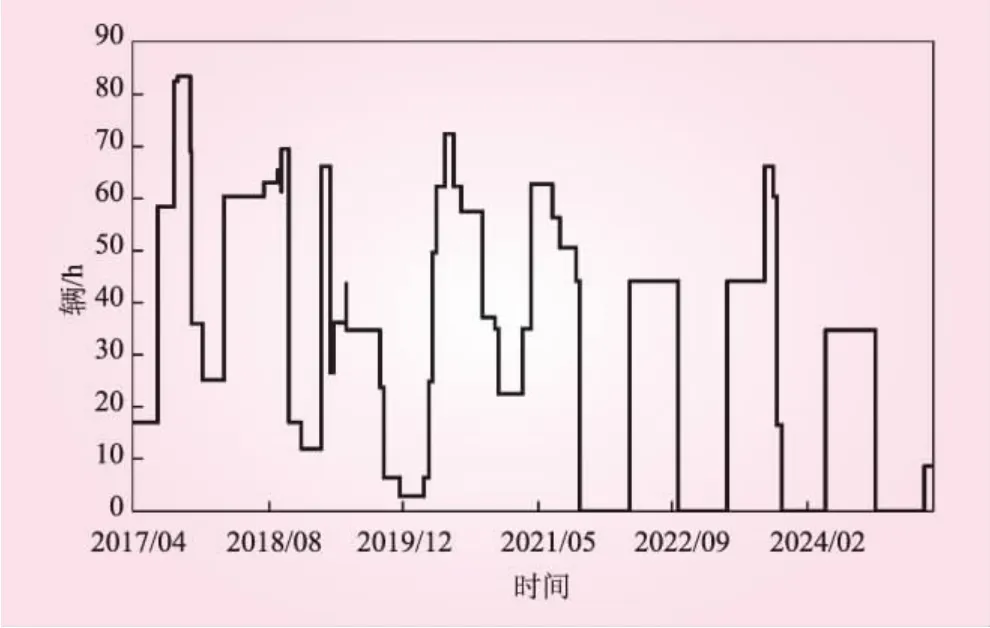
图5 最大小时行车密度包络线

图6 交通仿真可视化
[1]HEILALA J, VATANEN S, TONTERI H, et al.Simulation-based sustainable manufacturing system design[C]∥Proceedings of the 2008 Winter Simulation Conference,2008:1922-1930.
[2]WILFRIED J.Computational modeling and control system of continuous casting process[J].The International Journal of Advanced Manufacturing Technology,2007,33(1-2):1-6.
[3]HONG W C,DONG Y,ZHENG F,et al.Forecasting urban traffic flow by SVR with continuous ACO[J].Applied Mathematical Modelling,2011,35(3):1282-1291.
[4]GAN N T, CHEN L S.Research on fuzzy control rule of anti-vehicle rear-end collision by Matlab and Simulink[J].Advanced Materials Research,2011(308-310):2247-2249.
[5]薛霄.面向AGENT的软件设计开发方法[M].北京:电子工业出版社,2009.
[6]王仁超,朱颖.水利交通运输系统仿真中车辆速度问题的研究[J].昆明理工大学学报:自然科学版,2007,32(2):95-98.
猜你喜欢
轮胎工业(2022年10期)2022-12-30
湖南水利水电(2021年6期)2022-01-18
电子乐园·上旬刊(2021年8期)2021-05-16
河南水利年鉴(2020年0期)2020-06-09
河南水利年鉴(2020年0期)2020-06-09
建材与装饰(2018年5期)2018-02-13
筑路机械与施工机械化(2017年6期)2017-07-10
制造业自动化(2017年2期)2017-03-20
轮胎工业(2017年9期)2017-03-09
中国房地产业(2016年2期)2016-03-01