水箱液位控制系统的仿真分析
2017-03-15 20:05卫旋
电子技术与软件工程 2017年2期


摘 要 随着我国经济发展水平的不断提高,科学技术得到飞速发展与进步,在科技进步下,控制理论也日趋完善,促使控制策略不断产生。在工业生产中,应用控制技术与控制理论可以获得更高的经济效益,还可以不断对控制设备升级改造,使企业对生产的产品有更高的认识度,明确工艺与生产各环节缺陷,进而将生产效率提升,成本得到节约。水箱液位控制系统是工业生产系统的代表,由此,本文将对水箱液位控制系统进行研究,构建“水箱系统”液位控制的数字仿真模型,以为相似控制系统应用与研究提供参考。
【关键词】水箱液位控制系统 仿真模型 工业生产
三容水箱液位控制系统鉴于结构柔性,有着非线性特性,通过对各种连接水泵阀门控制可以构成各系统对象,使复杂的回路控制变得简单,还能对现代工业生产中的液位與流量、压力、温度等进行控制测量,还原工业生产过程,进而为工业生产提供更为科学的理论依据。由此,非线性系统,尤其是多变量非线性系统控制技术在自动化领域发挥的作用越来越大。本文将对三容水箱液位控制系统构建数学模型,研究水箱液位系统建模与控制策略。
1 系统总体架构
本次实验硬件为美国AD公司生产的单片机(ADuC834),将其作为单片机的主控芯片,与组态软件设计的水箱液位监控系统相匹配。维持原有水箱系统功能的基础上,将体积与成本缩小,设置用户手动操作功能,比如,算法编写等,可确保用户对水箱实验系统结构、硬件控制、软件模块有更为全面了解。由有机玻璃制造而成的实验台,包含了大水箱与不锈钢台面、电器盒、水槽等部件,同时设置了5个进水手动操作阀与3个手动溢水阀,还有1个手动连通阀与电动阀,水槽中安装有潜水泵,安装数量为2个,1个用于打水,另一个当作循环泵。
2 三容水箱实验系统建模
2.1 传统控制方法应用的不足
2.1.1 经典的PID控制缺陷
经典的PID控制机制是设定调节比例、积分与微分三个参数,通过三个参数的调配与控制得到预期的控制效果。传统PID在调节过程中执行机构是连续运行、动作的,但是在积分能量下容易出现超调。且积分能量如果过小,会延长整个调节过程,花费更多调节时间,对于精度要求不高的系统可以使用PID控制,可以达到控制要求。
2.1.2 模糊控制应用与缺陷
模糊控制与传统PID存在不同之处,依据经验得到输入与输出误差及变化率,模糊的推理过程完全依赖于实验者的推理与经验。其次,结果反馈与化解存在模糊化,将控制状态变得具体化。这种控制策略可以解决水箱液位复杂的系统控制问题,在此方面有一定优势,可以将水箱液位系统复杂的、不可预知的因素干扰去除。
2.2 实验法建模
建立输入、输出模型一般在实验法中应用,将工业过程作为黑匣子,结合外部特性与机理对动态性质进行描述,不需要对内部机理做过多研究。三容水箱实验系统可依据不同水箱与阀门构建数学模型,被控对象设为1号水箱液位h1:将手动阀1与电动阀1同时打开,将其作为被控对象,为1阶系统;将手动阀1与连通阀1、电动阀2打开,作为二阶系统;将手动阀1与连通阀1及连通阀2、电动阀3打开,被控对象为三阶系统。控制输入用手动阀1表示,系统的输出用水箱2的液位高度h2表示,调节进水量设定为Q,将水箱2液位高度h2维持在设定值内,实现单输入单输出的二阶系统,二阶系统模型见图1所示。
依据物料平衡原理,水箱1动态平衡方程为:
水箱2的动脉平衡方程为:
以上公式中,水箱液容为A,通常来说,容器液容值与该容器横截面积等同,水箱1的横截面积为A1=5014mm2,水箱2横截面积为A2=16204mm2。水箱1进水量为Q1,水箱1放水量与水箱2进水量相等。
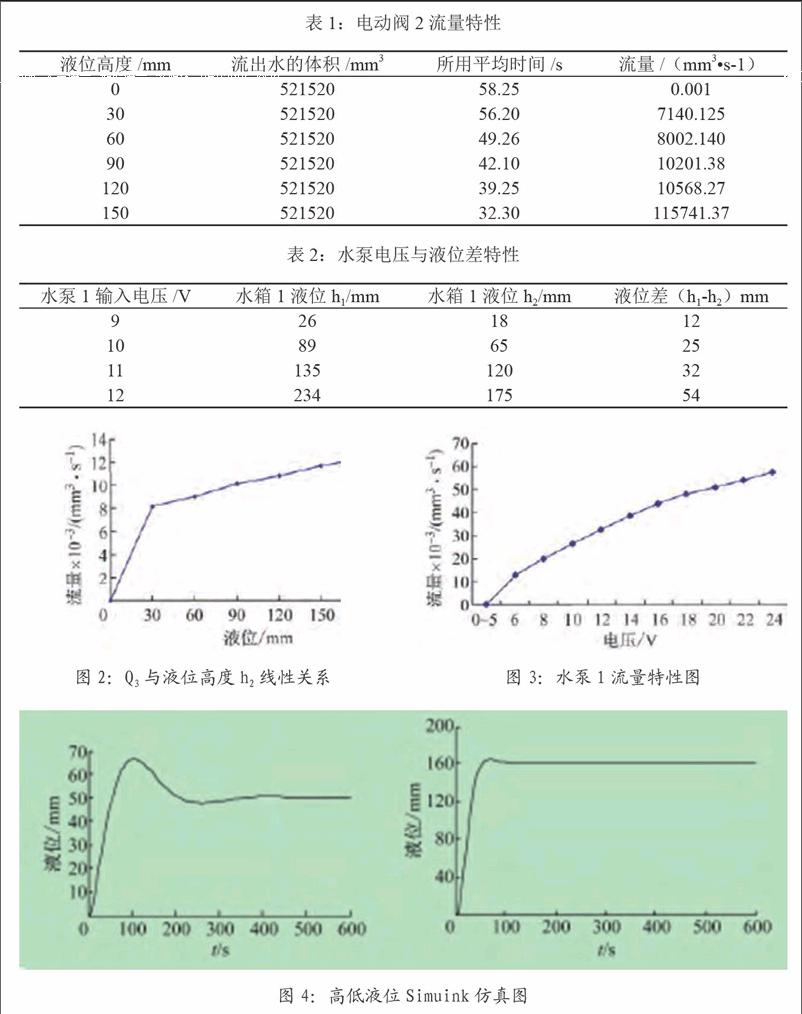
2.2.1 电动阀2流量特性
本次实验选用的电动阀开口度为30%,因水箱横截面不变,可以测定不同液位高度与电动阀2流出水所用时间,进而计算得到阀门流量,并了解Q3与水箱2液位高度h2间关系。实验数据见表1。
依据以上实验数据得到Q3与液位高度h2线性关系如图2所示。
2.2.2 水箱1与水箱2平衡关系
水泵电压与液位差特性通过重复实验,调节水泵1两端电压值得到,进而使系统达到平衡状态。各区间水泵电压与液位差见表2所示。
当液位处于平衡状态时,Q1=Q2=Q3,可以通过水泵1的打水流量Q1等值低缓得到Q2。
3 模型仿真与实验
3.1 Simuink仿真
Simuink作为MATLAB的重要组成,有效用于动态系统建模与仿真分析中,是一种常见的面向结构的系统仿真软件,还可以用于可视化动态系统仿真。依据以上三容水箱二阶传递函数,可以对高分段液位仿真,将液位值分别设定为40与150,选择对应的传递函数,在Simuink中构建出实验模型。
3.2 三容水箱实验分析
现对低液位段仿真与实验结果比较。在仿真图中,上升时间tr所用时间大致为60s;峰值时间tp约为80s;对上升时间ts调节,调节后约为150s,超调量为31%;在三容水箱的实验液位图中,上升时间tr约为30s;峰值时间tp约为50s;对ts时间进行调节,调节时间ts为130s,超调量为35%仿真图与实验图对比可以描绘出实际液位控制曲线,发现超调较大,且出现震荡现象,仿真曲线在处于牺牲调节阶段时,震荡表现最为明显。
其次,对高液段仿真与实验结果对比情况进行观察,可以发现在仿真图中,上升时间150s;超调量约为5%左右。在三容水箱实验液位图中得到的ts上升时间为30s;峰值时间约为50s;调节时间ts则大致为70s,超调量为8%左右。两幅图对比存在差异较小,各性能指标基本一致。实验仿真与三容水箱实验效果大致相同,但依然存在误差,分析原因为:
(1)实验数据测量受各项环境影响存在误差,最大误差来自于水泵流量测量与处理上,造成建模精确度不够。
(2)鉴于三容水箱系统不同环节控制上存在延时性,造成液位控制过程中出现超调的情况,进而不能在规定时间内完成调节。
4 结束语
自设计三容水箱液位控制实验系统中,开展实验仿真可以基于物料平衡原理与实验数据的二阶单输入与单输出构建模型,科学对实验模型正确性进行验证,值得采用。
参考文献
[1]朱涛,周天沛.基于PLC的双容水箱液位控制仿真与实物实验系统设计[J].实验技术与管理,2013(11):29-33.
[2]王晓鹏.三容水箱液位控制系统动态仿真与多变量过程的在线监测[D].济南:山东大学,2010.
[3]张倩.基于S7-300PLC的模糊解耦控制对水箱液位控制的研究[D].秦皇岛:燕山大学,2014.
作者简介
卫旋(1986-),女,现为运城学院助教,硕士研究生。专业为控制科学与工程。研究方向为系统工程。
作者单位
运城学院 山西省运城市 044000
猜你喜欢
石油沥青(2021年2期)2021-07-21
电子测试(2018年9期)2018-06-26
科技传播(2016年11期)2016-07-20
科技与创新(2015年19期)2015-10-14
湖南大学学报·自然科学版(2015年8期)2015-09-06
河南科技(2014年8期)2014-02-27
江苏卫生事业管理(2013年6期)2013-03-11