
探究轿车右转与电动自行车相撞数学模型
2017-03-15 20:19王天杨
科技创新导报 2016年29期
王天杨

摘 要:隨着电动自行车进入中国,交通路况也随着这种新交通工具发生了改变。电动自行车轻便、快捷等优点受到很多人的青睐;然而因为噪音较小不易引起注意、超标电动自行车违规上路等因素,越来越多的电动自行车与汽车发生相撞事故,并造成财产和精神损失。该文意在探讨汽车右转与电动自行车相遇时为避免相撞而要求的速度关系,并通过解析几何与传统几何方法解出了两个情境下的速度。该论文目的在于提醒汽车驾驶员在通过自行车道的限速以及警告电动自行车在自行车道内与机动车合流时要保持警惕。
关键词:电动车 碰撞 轿车 现状
中图分类号:U4 文献标识码:A 文章编号:1674-098X(2016)10(b)-0039-04
电动自行车已成为我国近年来兴起的一种新型交通工具。因其轻便灵巧、价格低、能耗少、速度快、污染少等特点,深受中国消费者的喜爱。根据第24届中国国际自行车展览会,截至2013年底,中国电动自行车社会保有量已达到1.81亿辆[1]。电动自行车在我国主要作为城市居民的日常出行交通工具之一。但是,电动自行车在给人们带来便利的同时,也对交通路况造成了不小的负面影响。
1 研究目的和意义
我国的电动自行车管理的确有待整治:国家标准《电动自行车通用技术条件》于1999年颁布,16年来在电动自行车相关规定上没有太大的改动,但随着科学技术的发展,厂商不断对电动自行车进行配置和性能上的改进,电动自行车的质量越来越好,最高设计车速也越来越高,因此如今大多数电动自行车已经不符合《通用技术条件》中对“电动自行车”的规定。另外,国家标准委员会联合公安部、交通部和相关部门的专家表示,2012年实施的《机动车运行安全技术条件(GB 7258-2012)》不能管辖不属于“电动自行车”的上路电动自行车,因为电动自行车相关的定义将在电动自行车新国家标准修订完成后再做梳理和修改。然而中国自行车协会称,国内电动车企业早已多次商议修改技术标准,拟对最高时速20 km和重量40 kg的两大标准进行调整。“方案提交多次,但标准委都未予采纳。”[2]截至2016年,仍未有关于新电动自行车标准的相关规定出台。
由于电动自行车相关规定与管理相对滞后,但电动自行车保有量快速增长,因此涉及电动自行车的交通事故以及引发骑车人受伤、死亡的人数在近年来急剧上升。根据2014年中国统计年鉴的数据显示,2014年全年发生交通事故196 812起,非机动车交通事故发生14 175起;其中电动自行车交通事故12 782起,占非机动车事故率的90.2%[3]。电动自行车骑车人已成为非机动车骑车人的伤亡主体,给人民生命财产带来巨大损失。
电动自行车在方便市民出行方面存在巨大优势,因此越来越多的人会选择使用电动自行车出行。所以与电动自行车有关的交通事故会越来越多。因此,制定电动自行车新规定与法规是目前急需解决的问题,而电动自行车与汽车交通事故的研究能够为解决如今电动自行车问题提供理论依据,也能为汽车企业对骑车人的保护性设计提供依据,为交通管理有关部门对交通事故的处理提供便利。
中国电动自行车相关法规的制定要基于中国个性化交通的发展。与国外不同,中国的电动自行车保有量远远超过其他国家,而且道路占比也相对较高。通过分析电动自行车购买人和骑车人的心理,可以分析出发生交通事故的主要原因,在交通事故责任认定中有重要的现实意义。
2 国内外电动自行车研究现状
2.1 国内法规现状
《电动自行车行业标准》已于1997年颁布,对约束行业合理经营起到了一定的作用。另外,1999年10月颁布的《电动自行车通用技术条件》(GB 7761-1999)规定了电动自行车“以蓄电池作为辅助能源,具有两个车轮,能实现人力骑行、电动或电助功能的特种自行车。”《中华人民共和国道路交通安全法》以法律的形式,将电动自行车归为非机动车管理的范畴,并对其种类登记、道路行驶做了明确规定,电动自行车在非机动车道行驶。
电动自行车的购买与使用者大多数是上班族,他们使用电动自行车的目的是希望能够更快速、便捷地赶到目的地。正是使用者求快的需求,生产企业将限速装置设计成活动式。而随着电机、电池等电动自行车相关技术的不断发展,电动自行车的最大设计速度得以不断提升。为了在逐渐提升的最高速度中维持电动自行车结构与安全性能稳定,电动自行车的质量也在不断增加。如今,沿用了十几年的国家标准相关要求已经不能很好地符合市场现状,而又因为管理不力,导致市场上绝大多数电动自行车都不符合国家标准。因此,国标已不能适应市场的需求,应进行适当修订。
国内对于电动自行车及其相关事故的研究目前较少。而且,因为电动自行车的法规现状,导致了国内对电动自行车的定义仍然存在一些争议。因为《通用技术条件》对电动自行车的定义已经不能适用于当下的情况,国内针对电动自行车的研究主要集中于以下几个方面:交通特性方面、交通事故调查方面、碰撞安全性方面。
2.2 国外法规现状
因国内外经济、城市规模、交通状况等原因,国外的出行方式主要为汽车,辅以公共交通工具和自行车,电动自行车数量和人均拥有比例较中国来说都非常小。2015年,世界电动自行车销售量约为4 000万辆,而中国销售量约为3 680万辆,占92%。国外的电动自行车不作为主要交通工具之一,而是休闲、近距离路程的代步工具,交通功能较中国来说相对较弱,因此国外对电动自行车的研究较少。
2.3 全球电动自行车市场的主要性能规范
部分国家或组织关于电动自行车的相关法规见表1。
3 模型论证分析
为了分析电动自行车与机动车发生碰撞事故时二者的速度数值特征,该文取交通事故类型中典型的一个例子,机动车右转、电动自行车直行相撞模型来做数学建模试证分析。在实际交通中有许多该相撞模型的案例,包括丁字路口右转弯道、机动车道主路入口处等。由于转弯对视野要求大、机动车A柱限制驾驶员视野角度、电动自行车疏于交通路口意识等因素,路口车辆交汇处称为事故多发地段,因此该文选择该模型进行分析。
3.1 模型假设与简化
模型的假设如下。
(1)机动车从南北向最右机动车道右转至东西向最右机动车道。
(2)电动自行车行驶时噪音足够小,使机动车驾驶员只能通过视线来判断路况;驾驶员的有效视角不随车速改变而改变,而且驾驶员不会在转弯过程中从左侧车窗(转头扩大视野)查看路况。
(3)当驾驶员看到电动自行车后,经过一特定反应时间后开始刹车。
(4)电动自行车始终自西向东直行,且不改变速度。
(5)全程无任何其他车辆、障碍物的干扰。
同时,为简化计算,并省略实际情况中无关因素的干扰,现将该模型简化如下。
(1)将机动车在道路上的二维投影简化为矩形,其中车总长、总宽为矩形的边;并且假设汽车的4个轮子在矩形的4个端点。
(2)将电动自行车的二维投影简化为一个质点。
(3)将机动车刹车时的运动简化为匀减速运动。
3.2 模型分析
解决该数学模型的流程包括:建立二维直角坐标系、输入边界条件、判断碰撞点、套入计算机动车视野线方程、机动车及电动自行车轨迹方程,并更换不同速度条件,混合求解。
3.2.1 建立二维直角坐标系
使用建立解析几何坐标系的方法,以垂直于非机动车道为y轴、平行于非机动车道为x轴建系,并定义单位长度为1 m。因为机动车的4个车轮的运动轨迹均为圆周运动,为简便计算,将圆周运动的圆心设置为坐标系的原点,如图1所示。
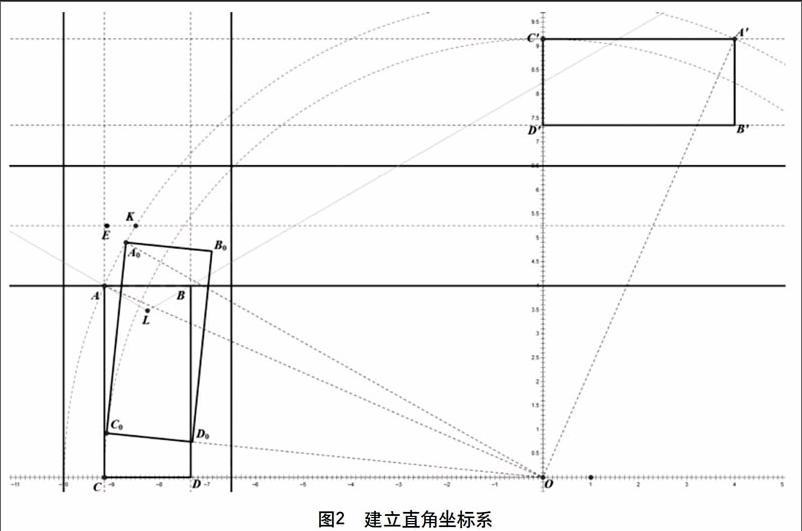
根据车辆转弯运动的数学模型[4],机动车在转向角不改变的情况下,其4轮的运动轨迹为不同半径的同心圆;以机动车左后轮运动方向与y轴正方向平行时记为车辆开始转弯,以与x轴正方向平行时记为车辆停止转弯,如图2所示。
定义圆心即坐标轴原点为O点,轿车转弯初始态左前轮、后前轮、右后轮、左后轮分别为A、B、C、D点;终止态分别为A、B、C、D点;定义当车辆行进到某一位置时四轮分别为A0、B0、C0、D0点;定义电动自行车的位置为E点。
3.2.2 输入边界条件
为满足实际碰撞情况中的数据,同时为了简化计算,部分边界条件按如下定义:机动车车身满足刚性特征,车辆前后轮的距离为常量L=4 m,左右轮距离为常量S=1.8 m;机动车刹车时做匀减速运动,且加速度为a=10 m/s2;机动车驾驶员的反应速度tr=0.4 s;机动车道宽为3.5 m,非机动车道宽为2.5 m;机动车驾驶员的有效视角宽度为120°,即车前端与驾驶员视角边界线为150°。机动车转弯半径为10 m(左前轮轨迹半径)。
3.2.3 判定碰撞点
该数学模型的目的是求出机动车/电动自行车通过合流处时发生碰撞的速度范围,因此只需求出速度最大值即可,小于该速度双方都有机会刹车避免碰撞。
思考电动自行车速度不变、机动车不同速度情况下与电动自行车的碰撞点:当轿车速度足够大时,电动自行车会与轿车AC边相撞,而在实际情况中,电动自行车会刹车从而避免碰撞;当电动自行车与轿车AB边相撞时,若此时临界速度ν小于A点碰撞速度,则轿车会先于K点碰撞的情况发现电动自行车,因此会停在K点之前不会发生碰撞;随着轿车速度继续减小,电动自行车会先于轿车通过路口,不会发生碰撞。因此,我们只需求出电动自行车与机动车A点相撞(即与圆和直线的交点K相撞)时机动车的速度即可。
同理,对于机动车速度不变的情况,当电动自行车的速度最大时,轿车与电动自行车的碰撞点仍为K点。所以模型建立为机动车与电动自行车于K点发生碰撞,且此时轿车的速度正好为0。
3.2.4 计算方程
该模型可分解为3个阶段,分别如下。
(1)电动自行车进入驾驶员视野前(经过时间t1)由A0点的坐标与直线L0A0斜率可求得直线L0A0方程:,其中θ是机动车左前轮转过的角度,。
(2)当机动车视野边界与电动自行车相遇时,有方程:
…
(3)电动自行车进入驾驶员视野后到轿车驾驶员踩刹车前(tr=0.4 s)。
电动自行车、机动车均匀速行驶,此时电动车横坐标为,此时轿车经过的路程为0.4ν,驾驶员踩刹车到轿车左前轮到达K处停止(经过时间t2),电动自行车仍然匀速行驶,有方程|-8.49-(-11.32+0.4v0+v0t1)|=2.83-0.4v0-v0t1。
3.2.5 联立求解
将代入方程中,可解得=2.2m/s=7.92km/h;
将3m/s代入方程中,可解得=1.23m/s=4.424km/h。
3.2.6 建模结论
(1)电动自行车与机动车的速度临界值存在正相关关系。随着电动自行车行驶速度的增加,机动车与电动自行车行驶路线重叠的时间就越短,因此机动车能够以更大的速度通过交汇处。
(2)电动自行车速度越大时,若为了保证机动车不与电动自行车碰撞,驾驶员的反应时间需要越短;若反应时间不变,则机动车的刹车距离就越大,发生事故的可能性越大。因此电动自行车高速通过路口时,发生交通事故的概率依然比减速通过大。
4 模型评价与总结
该模型得出的最大速度仅为参考值;因为在实际交通路况中,机动车与电动自行车的相遇要复杂得多。经过分析,该数学模型有如下缺陷与不足。
(1)车轮不应位于车身四角端点处。为简便计算,我们将车轮放置于矩形顶点。
驾驶员的视角不是固定的,它随着车速的提高而改变,且在拐弯时驾驶员会改变观察方向而不是只看前方。但因为的确很多交通事故都由驾驶室内视线问题导致,所以我们将视野因素代入了该模型中。
(2)电动自行车未改变行驶速度。无论电动自行车的驾驶员有多么不关注路况,都应该在通过路口处或合流处适当地减速。
(3)机动车与非机动车未存在让行现象。在实际交通中,当机动车驾驶员遇到如此情况时通常会让行非机动车,而有时非机动车也会减速示意机动车通过;而多数类似的交通事故都含有非機动车与机动车抢行的因素,我们便忽略了让行现象。
(4)在实际情况中,驾驶员无法准确地推断出电动自行车的速度。
模型改进可考虑实际情况,将车轮置于最合理处求解。或可考虑电动自行车驾驶员观察到转弯汽车后减速的情况。同时考虑轿车开始转弯的位置问题。
而由于电动自行车人均保有量较少,国外对于电动自行车的规定相对较宽松,但都根据各地交通状况制定。中国电动自行车规定不能一味照搬其他国家的法规,要从中国交通现状出发,制定适合如今状况的规定。
参考文献
[1] Elliot,Fishman,Christopher,等.电动自行车交通发展的主要趋势[J].城市交通,2016(2):83-96.
[2] 罗江凡.电动自行车交通安全相关问题及管理研究[D].西南交通大学,2008.
[3] 中华人民共和国国家统计局.2014中国统计年鉴[M].中国:中国统计出版社,2014.
[4] 徐志峰.车辆转弯运动的数学模型的完整证明[J].宁波城市职业技术学院学报,2014,9(4):1-4.
猜你喜欢
汽车文摘(2021年2期)2021-02-01
学生天地(2020年15期)2020-08-25
21世纪商业评论(2020年12期)2020-01-14
小学生学习指导(低年级)(2019年9期)2019-09-25
中国公路(2017年5期)2017-06-01
求知导刊(2016年30期)2016-12-03
