
具有语音识别和跟踪功能的玩具机器人控制系统设计
2017-03-13 08:03黄贤
科技创新导报 2016年26期
关键词:语音识别
黄贤


摘 要:设计一种具有语音识别和自动跟踪语音功能的玩具机器人,采用凌阳十六位单片机SPCE061A作为主控芯片,外接麦克,通过外围电路采集声音信号实现语音识别和语音定位,在语音命令识别成功之后控制玩具机器人做相应的动作。该控制系统功能完备,能够满足玩具机器人系统的控制要求。
关键词:玩具机器人 语音识别 语音定位
中图分类号:TP273 文献标识码:B 文章编号:1674-098X(2016)09(b)-0082-02
随着人们物质文化生活水平的提高,人们的消费水平越来越高。目前儿童玩具特别是智能玩具拥有一个很大的市场。智能玩具不仅能够满足儿童的好奇心、加强孩子和玩具的互动,而且可以激发儿童的求知欲[1]。智能玩具将计算机、电子、通讯等领域内的先进技术融合为一体,突破了传统玩具的局限性,赋予玩具“听”“说”功能,与人进行互动,寓知于乐,可使儿童在愉悦中学习、体会生活,真正达到寓教于乐的目的[2,3]。
1 总体设计方案
采用凌阳十六位单片机SPCE061A作为主控芯片,外接麦克到SPCE061A的声音输入模数转换通道,由单片机实现语音识别和声音定位,再利用SPCE061A的IO端口控制三级管的导通和关断,进而控制机器人的腿部、头部和飞碟电机,实现对机器人的动作控制,系统整体设计方案如图1所示。
语音识别语音信号输入:语音信号由该模块进入单片机后进行语音识别处理。声音定位信号输入:声音定位的语音信号经过转化,将模拟的声音信号转换为数字的高低电平,由I/O端口输入到SPCE061A。键盘输入控制:用于选择语音识别和声音定位模块,在语音识别模块下用于重新训练语音控制命令的按键。设有3个按键:KEY1-上电复位后用于选择语音识别模块;KEY2-上电复位后用于选择声音定位模块;KEY3-运行语音识别模块中用于选择重新训练语音控制命令。机器人控制:SPCE061A通过基本I/O口控制机器人的前进、后退、左转、右转和发射等。语音播放:在语音识别和声音定位中加入了语音播放,用来提示说话者训练语音控制命令、辨识后的应答和定位后的播放音源方位等。
2 系统模块设计
2.1 语音识别
该设计采用特定人识别方式,即语音样板由单个人训练,对训练人的语音命令识别准确率较高,而其他人的语音命令识别准确率较低或不识别[4]。识别电路如图2所示,麦克选用驻极体电容话筒,话筒的偏压由SPCE061A的VMIC管脚提供。
2.2 声音定位
由3个麦克組成声音定位的前端信号接收电路,3个麦克摆放成7 cm的等边三角形接收声音信号,每路麦克都经过相同的放大和整形将模拟的声音信号转化为数字高低电平输入到SPCE061A,在SPCE061A内识别三路麦克输入信号的相位差值,通过计算获取音源所在的方位。图3为单个声音信号接收及调理电路,图中R1、Q1形成一个恒流源,为麦克供应电流,U1A、C1、R2、R3形成一个放大电路,其中C1滤掉信号中的低频部分,R2/R3/U1A构成一个负反馈放大回路;C2、R4、R5、U1B形成一个过零比较电路。
2.3 机器人的电机驱动及控制电路
当单片机成功识别语音指令后,将对机器人的腿部、头部和飞碟发射装置进行运动控制,主要是通过IO口的输出实现对相应电机的控制。
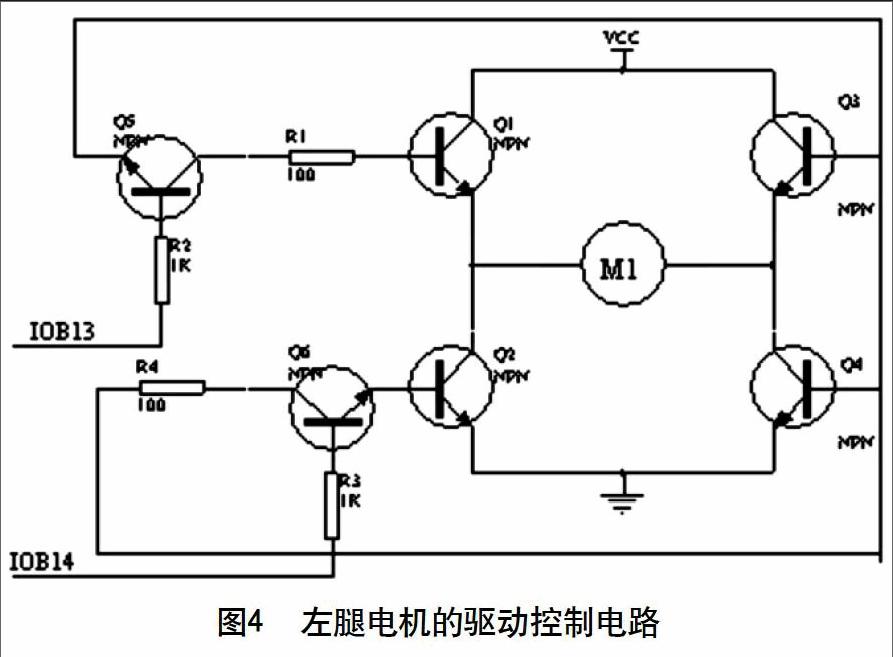
2.3.1 腿部电机控制
图4为机器人的左腿电机M1的驱动电路,该驱动电路采用4个三极管Q1-Q4作为驱动,提升流过电机的电流,2个三极管Q5-Q6控制电机正反转。电机控制的端口接到了SPCE061A的IOB13和IOB14,只需要给IOB13高电平就可以控制其正转,左腿前进;给IOB14高电平就可以控制电机反转,左腿后退。
右腿的电机驱动和控制电路与左腿的完全相同,其电机控制的端口接到了SPCE061A的IOB11和IOB12,只需要给IOB12高电平就可以控制其正转,右腿前进;给IOB11高电平就可以控制电机反转,右腿后退。
2.3.2 头部电机控制
用于头部转动的电机驱动控制电路和左右腿的相同,其电机控制的端口接到了SPCE061A的IOB9和IOB10,只需要给IOB9高电平就可以控制电机正转,头部转向左方;给IOB10高电平就可以控制电机反转,头部转向右方。
2.3.3 发射飞碟电机控制
为增加玩具机器人的趣味性和互动性,设计中增加了机器人发射飞碟的功能。采用两个直流电机进行控制,由SPCE061A的IOB8和IOB15控制电机M4和M5,分别控制带动装置和加速装置,其中带动弹簧装置弹出飞碟,加速装置带动飞碟发射出来,驱动控制电路如图5所示。
3 结语
基于SPCE061A单片机开发的玩具机器人控制系统,由3个麦克摆放成边长为7 cm的等边三角形,采集声音信号并进行语音识别,根据识别的语音实现对机器人的动作控制。系统采用模块化设计方案,既能实现智能控制,又增加了互动性,达到了玩具机器人寓教于乐的效果。
参考文献
[1] 渠川钰,刘修泉.基于STC89C52单片机的斗牛玩具机器人研制[J].机电工程技术,2011,40(7):36-38.
[2] 杨宜民,李莹.智能玩具研发动态及思考[J].广东工业大学学报,2004,21(3):34-39.
[3] 冯劲梅,王庆明.采用单片机的直流电机无线遥控系统[J].机电工程,2010(12):7-10.
[4] 张培坚.十六位单片微处理器原理及应用(凌阳SPCE061A)[M].北京:清华大学出版社,2005.
猜你喜欢
科技创新与应用(2017年3期)2017-02-18
中国新通信(2016年21期)2017-01-06
现代电子技术(2015年11期)2015-07-28
现代电子技术(2015年8期)2015-07-09
