自动换刀机械手控制系统分析
2017-03-08 06:24张继红
装备制造技术 2017年12期
张继红
(四川职业技术学院,四川 遂宁629000)
机器人控制系统是加工中心换刀机械手的中枢系统,是控制机器人有条不紊工作的保证。自动换刀机械手的主要任务是完成作业顺序,控制位置姿势,进行路径规划,并调节作用在抓举物上的力或力矩大小。作为加工中心自动换刀机械手,要求准确地把主轴上的刀具卸下并装入刀库中,把下工序的刀具取出并装入主轴上。而控制系统涉及电子、电气、自动控制、计算机、人工智能的复杂体系,是跨学科综合性的技术。而关节机械手换刀目的就是安装调试后可用于不同商家的加工中心,可简化刀库设计。这样可以形成一系列独立的、通用的加工中心换刀设备,具有广泛的市场性。
1 机械手控制系统分类
由于机械手是多关节的连杆系统,控制系统的分类按不同标准有不同划分。按照控制系统对工作环境变化的适应分有程序控制系统、适应性控制系统及人工智能控制系统。按照运动坐标方式来分有关节空间运动控制和直角坐标空间运动控制。按照运动控制器分为以单片机为核心的机器人控制系统、以PLC为核心的机器人控制系统、基于IPC+运动控制器的工业机器人控制系统。按运动量控制方式将机器人控制分为位置控制、速度控制和力控制三类。
2 机械手控制系统组成
作为机械手最核心的控制系统,是机器人按照指令操作或适应周围环境的必要保证,它的组成部分[1]如图1所示。控制计算机是控制系统的调度指挥中心,可以为微型机、微处理器有32位、64位等。示教盒是示教机器人的工作轨迹和参数设定,还有人机交互操作等,具有独立的CPU以及存储单元,可以与主计算机之间实现信息交互。操作面板上面分布有各种操作按键、状态指示灯,完成基本功能操作。硬盘用来存储机器人工作程序的外围存设备。数字和模拟量输入输出(I/O),完成各种状态和控制命令的输入或输出。打印机接口,打印需要输出的各种信息。
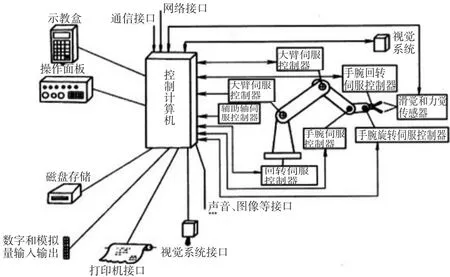
图1 机械手控制系统组成
传感器接口实现信息的自动检测,适应外部环境控制,一般为力觉传感、触觉传感和视觉传感器等。轴控制器可以实现机器人各关节位置、速度和加速度控制。辅助设备控制实现机器人配合的辅助设备控制,例如手爪变位器。通信接口用于实现机器人和其他设备的信息交换,分为串行接口、并行接口等。网络接口通过光纤或WIFI完成网络互联互通,如国际互联网,物联网等。
3 机械手控制方式
根据不同的分类方法机器人控制方式分为不同类型。按总体控制方式可以划分为动作控制方式和示教控制方式;按照坐标分为关节空间运动控制和直角坐标空间运动控制;按轨迹可分为点位控制和连续控制;按照系统对环境的适应分为程序控制、自适应控制、人工智能控制。按照运动方式可以分为位置控制[2]、速度控制、加速度控制、力控制、力位混合控制等。
为了体现换刀机械手的通用性和灵活性,通常设计成关节机器人。按照控制量所处空间的不同,机器人控制采用关节空间的控制方式和直角坐标空间运动控制。对于串联式多关节机器人,关节空间的控制是针对机器人各个关节的变量进行的控制,直角坐标空间运动控制是针对机器人末端的变量进行的控制。下面是两种先进的机器人控制方式。
自适应控制是当系统的输入或干扰发生变化时,控制系统能够自适应调节系统参数或控制策略,使输出仍能达到设计的目标,结构如图2所示。这样提高了对环境的适应能力。系统通过对随机变量状态的观测和系统模型的辨识,设法达到一定的控制指标。可分为模型参考自适应控制系统、自校正控制系统、自寻优控制系统、变结构控制系统和智能自适应控制系统等。
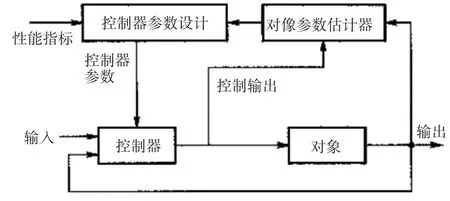
图2 自校正控制系统的基本结构
另外一种是神经网络控制系统,它是智能控制分支,能解决复杂的非线性、不确定系统的控制问题。神经网络控制系统是神经网络理论与控制理论相结合的产物。其结构如图3所示。神经控制是有学习能力的控制。比如神经预测控制、神经逆系统控制等。
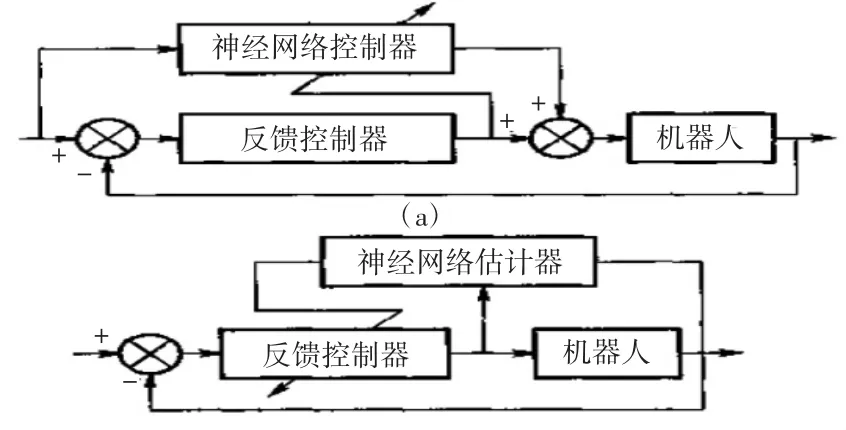
图3 神经网络控制系统结构
4 机械手控制系统的应用
下面以FANUC F[3]为例,说明其控制系统内部结构以及各部分的功能特点,如图4所示。
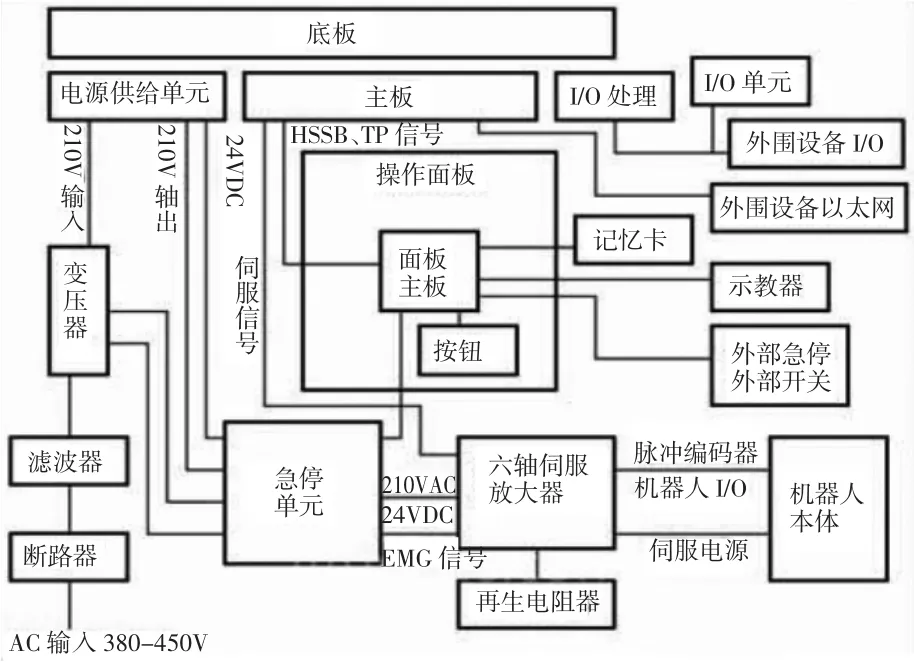
图4 F A N U C F控制系统内部结构
主控单元是控制系统的中枢,有主板、CPU、FROM/SRAM组件及伺服卡,作用为控制器内部及外围设备的信号处理与交换。
示教器用来完成机器人编程操作,以及显示控制器状态和数据。电源单元其作用由变压器向电源分配单元输入230 V交流电,通过单元电源分配功能对控制箱内部各工作板卡输出210 V交流电及±15 V、+24 V 直流电。
伺服放大器用来提供伺服电机驱动电源,还可以与绝对值编码器实现实时数据转换并与主控机间采用光纤传输数据进行实时信号反馈。
安全保护电路作用是变压器直接向急停单元供电,接入内部各控制板卡形成保护回路进行电路保护。
输入/输出模块其标配为ModuleA/B,并通过扩展槽安装Profibus板和过程控制板与PLC[4]及外围设备进行通信。急停电路作用为控制紧急停止系统、伺服放大器的电磁接触器。
5 结束语
自动换刀机械手要准确灵活地完成换刀,涉及到多种变量的精确控制,例如要完成各关节速度和末端速度的控制,完成关节驱动力,力矩与外载荷的控制,另外还要完成机械手末端的位姿精确控制,具有很强的实时控制要求。
[1]韩建海.工业机器人[M].武汉:华中科技大学出版社,2012.
[2]刘极峰.机器人技术基础[M].北京:高等教育出版社,2012.
[3]郭彤颖.机器人学及其智能控制[M].北京:人民邮电出版社,2014.
[4]【美】约翰·埃欧文.PIC机器人学习指南[M].北京:科学出版社,2005.
猜你喜欢
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
中学生数理化·七年级数学人教版(2022年4期)2022-04-26
煤气与热力(2021年12期)2022-01-19
中学生数理化·七年级数学人教版(2021年4期)2021-07-22
哈尔滨轴承(2020年3期)2021-01-26
电子制作(2019年13期)2020-01-14
电子制作(2019年13期)2020-01-14
制造技术与机床(2019年8期)2019-09-03
环球时报(2019-07-18)2019-07-18