北斗二号双模型用户机的设计实现
2017-03-03 01:09张礼伟刘召磊辛月宽翟雄志
舰船电子工程 2017年2期
张礼伟 刘召磊 辛月宽 翟雄志
(1.海军驻天津七〇七所军事代表室 天津 300000)(2.中船航海科技有限责任公司 北京 100071)
北斗二号双模型用户机的设计实现
张礼伟1刘召磊2辛月宽2翟雄志2
(1.海军驻天津七〇七所军事代表室 天津 300000)(2.中船航海科技有限责任公司 北京 100071)
论文以北斗双模型用户机研制为背景,介绍了北斗双模型用户机的工作原理和组成,并详细介绍了总体设计方案,包括硬件方案、软件方案。然后从灵敏度、捕获策略、导航电文处理策略、低功耗设计等四个方面解释了关键技术,最后给出实验结论及测试结果。
北斗用户机; 北斗双模型用户机; 捕获策略
Class Number TN927
1 引言
北斗卫星导航系统自1994年启动建设,2006年建成北斗卫星导航试验系统,于2012年正式形成区域服务能力,并已产生了巨大的经济、政治和社会效益。北斗卫星导航系统分为RNSS模式和RDSS模式:RNSS模式提供无源模式的定位、测速、导航和授时服务;RDSS模式除提供有源模式的定位和授时服务之外,还具备短报文通信、位置报告、监收、通播和指挥功能,这是北斗卫星导航系统区别于其他卫星导航系统的重要特点,不但能够解决用户“我在哪”的问题,还能解决“让别人知道我在哪、我在干什么”的问题[1~2]。
北斗双模型用户机基于北斗卫星导航系统RNSS和RDSS两种工作模式,具备连续实时导航、定位、测速、定时、短报文通信、位置报告等主要功能;主要分为车载双模型和手持双模型,其中手持双模型用户机采用一体化设计,对体积、功耗、续航时间等要求较高,技术复杂度和开发难度都比较大,技术上有很强的代表性。本文以手持双模型用户机为例详细介绍北斗用户机的总体方案设计与关键技术。
2 北斗双模型用户机工作原理
2.1 北斗双模型用户机组成
北斗用户机主机主要由天线、射频、抗干扰AD、基带、信息处理和显控等六部分组成。其功能组成与信号流程图如图1所示。
2.2 RNSS工作原理
天线接收RNSS B3频点卫星信号经过射频模块的滤波、低噪声放大和下变频处理,转换为模拟中频信号;再经过ADC芯片采样及抗干扰处理后,输出数字中频信号给RNSS基带处理芯片;RNSS基带芯片完成信号的捕获、跟踪,并可输出观测量数据以及导航电文信息,用户机通过DSP信息处理软件控制基带芯片完成上述功能,利用上述数据进行导航定位解算,并将解算结果按标准协议输出给显控单元,用于RNSS业务功能的显示[3~4]。
2.3 RDSS工作原理
RDSS业务功能包含S频点的接收功能和L频点的发射功能。
1) 接收功能
天线接收到S频点的卫星信号并放大后,射频模块再对接收信号经过滤波、低噪声放大和下变频处理,输出模拟中频信号;经过ADC芯片采样及抗干扰处理后,输出2bit数字中频信号给RDSS基带处理芯片;RDSS基带芯片的完成信号的捕获、跟踪、解调,并可输出RDSS导航数据;用户机可通过DSP软件将导航数据按照标准协议格式输出给外设或显控单元,用于RDSS业务功能的显示。
2) 发射功能
当用户通过显控单元或串口指令进行RDSS业务功能的定位或短报文等操作时,DSP软件将数据发送给RDSS基带芯片;RDSS基带芯片根据《RDSS出入站信号格式》进行格式转换,再进行调制处理,生成BPSK数字基带信号,发送给射频模块;射频模块将BPSK数据经过调制、滤波和放大后通过天线发射给卫星。
3 北斗双模型用户机设计方案
3.1 硬件方案
北斗用户机从功能上可划分为天线模块、射频模块、抗干扰AD模块、基带模块、信息处理模块、显控模块六个单元模块,硬件框图如图2所示。
3.1.1 天线模块
天线单元主要包含三频无源天线,能够完成RNSS B3频点、RDSS S频点信号的接收和RDSS L频点信号发射。对于手持双模型用户机而言,为了减小体积,天线应采用一体化设计的微带陶瓷天线,三个频点按照频点特性堆叠在一起,如图3所示。
3.1.2 射频模块
射频模块采用B3、L、S双模一体模式,在单一模块内完成RNSS和RDSS的功能。主要功能如下所述:
1) 实现接收B3、S频点信号的滤波、低噪声放大及下变频处理,接收通道实现自动增益控制(AGC);
2) 实现L频点信号的BPSK调制、滤波、放大,发射通道信号功率≥5W,可通过SPI接口微调;发射频率可调,可调范围大于20KHz;
3) 模块内置高稳态晶振,综合产生所需频点,可输出50MHz时钟和62MHz时钟。
3.1.3 抗干扰AD
考虑到用户机窄带抗干扰的要求,可采用与AD9288引脚兼容的抗干扰AD芯片,同时提供B3、S频点两路信号的窄带抗干扰和模数转换,其中RNSS抗窄带干信比不小于60dB,RDSS不小于50 dB。
3.1.4 基带模块
基带模块的核心器件为RNSS基带芯片和RDSS基带芯片。
1) RNSS基带芯片
方案中选用的RNSS基带芯片为统型的专用基带芯片。在硬件设计中,基带芯片连接抗干扰AD输入4bit数字中频采样信号;通过并行总线连接DSP,完成与信息处理模块的信息交换;为了实现加密信息的P码直捕功能,需要外接精密测距产生器芯片、保密芯片、RTC时钟芯片;基带芯片62M中频时钟也由射频模块提供。
2) RDSS基带芯片
方案选用的RDSS基带芯片集成了ARM7TDMI处理器,完成RDSS基带信号处理和发射基带信号的生成等功能。硬件设计中,基带芯片连接抗干扰AD芯片输入2bit数字中频信号;通过异步串口连接信息处理模块完成信息交互;外接一片保密芯片或用户卡完成RDSS业务功能。
3.1.5 信息处理模块
1) 信息处理器选型
为了满足多任务处理、实时性好、运行效率高、功耗低等需求,本设计采用TI的TMS320VC6747 DSP实现信息处理功能;TMS320C6747内的多个模块可以通过配置打开或关闭,便于功耗控制;TMS320C6747的待机功耗为62mW,完全运行模式中为470mW[5~6],符合低功耗的要求。
2) 原理框图
硬件设计中DSP通过并行总线连接RNSS基带芯片对其进行控制、参数配置,通过串口连接RDSS基带芯片和显控模块;配置一块16MB的SDRAM,保证PVT解算所需的内存空间;通过连接SPI接口Flash存储器,完成程序启动加载和参数存储。
信息处理模块原理框图如图4所示。
3.1.6 显控模块
显控模块用于提供一个友好的人机交互界面,在核心CPU的选型上,兼顾功耗、性能、技术成熟度及成本等方面因素,设计中采用一款ARM芯片即三星S3C6410作为主处理器;为保证操作系统足够、高效的运行空间,外部扩展两片256MB DDRAM,另外配置一片NAND FLASH 用于系统启动加载及地图等信息的存储;其他外围部件还包括音频模块、OLED液晶触摸屏、键盘及调试接口等。
显控模块原理框图如图5所示。
3.2 软件方案
北斗双模型用户机软件主要包括信息处理软件和显控软件,分别为信息处理模块和显控模块的核心软件。
3.2.1 信息处理软件
信息处理软件采用TI Code Composer Studio v3.3集成开发环境;基于TI的eXpressDSP(TM)技术构成基本的片内操作系统BIOS运行[7]。
信息处理软件框架主要分三部分:BSP板级支持包、主处理流程、用户接口协议处理模块。信息处理软件整体框架如图6所示。
1) BSP板级支持包
在程序中将与硬件平台相关代码集中于一个板级支持包BSP(Board Support Package)中,BSP负责和DSP硬件平台进行交互,如内存处理、中断处理等;在以后平台变更后,可以只对BSP包进行移植,便于系统的维护与升级。
2) 主处理流程
在BSP之上,是主处理流程,在配套模块的协作下完成RNSS处理流程和RDSS处理流程:
(1) RNSS处理流程:当RNSS基带芯片产生中断时,进入中断服务程序,通过信号量、消息或邮箱等同步机制激发相应的处理任务;主要的处理任务有捕获任务、导航电文处理任务、观测量任务,其中观测量任务在判断观测量、导航电文的有效性后,启动PVT解算任务,进行PVT解算;
(2) RDSS处理流程:当用户接口协议处理模块产生RDSS命令或收到RDSS基带芯片串口信息时,启动RDSS处理任务,进行RDSS定位、通信和授时等操作;
(3) 配套模块:设备配置模块和文件系统分别完成DSP初始化和参数配置功能以及文件存储功能;串口控制模块、RNSS基带芯片接口模块、PRM接口模块、保密芯片接口模块以及RTC芯片接口模块,用于和这些外设进行交换,实现数据收发功能,配合其他主流程的工作。
3) 用户接口协议处理模块
在信息处理的上层,是用户接口协议处理模块,完成来自UI或者外部串口的数据收发和协议转换功能,实现命令处理、参数配置和数据输出功能。
3.2.2 显控软件
1) 软件开发与运行环境
(1)开发环境:Platform Builder
Platform Builder是微软公司发布的用于定制WinCE操作系统的集成开发环境,利用Platform Builder完成系统定制任务[8~9]。
(2)运行环境:WinCE 6.0操作系统。
2) 显控软件框架
显控模块软件框架结构由驱动层、系统层、应用层三部分组成,其主要软件研制工作为驱动程序的开发、操作系统内核的定制、输入法等配套软件的调试。显控软件整体框图如图7所示。
4 关键技术
在用户机的研发过程中,基于用户机的关键技术指标要求及技术开发的难易程度,北斗用户机关键技术主要涉及以下四个方面:1) 接收灵敏度;2) 捕获策略;3) 导航电文处理策略;4) 低功耗设计。
4.1 接收灵敏度
影响整机接收灵敏度的主要因素有天线性能、射频性能、基带性能、电磁兼容性和整机结构计等多方面。在射频、基带等核心模块已确定、指标已固化的情况下,接收灵敏度主要取决于天线性能。
接收机整机(含天线)灵敏度计算公式为
S=-174+NF+C/N0-G
(1)
其中:S是整机灵敏度,-174dBm是整机空口热噪声,NF为整机的噪声系数,C/N0为基带解调门限,G为天线增益;从计算公式可以看出,影响整机灵敏度的因素只有NF、C/N和G。
此外,考虑到天线不圆度的影响,整机灵敏度指标要求保留1~1.5dB的余量,以包含AD、射频连接器以及其他损耗。
基于上述要求,结合整机灵敏度技术指标,可以得到灵敏度对天线增益的要求,即
1) B3频点增益
≥0dBic(仰角50°)
≥ -3 dBic(仰角20°)
2) S频点增益
≥1dBic(仰角50°)
≥-2Bic(仰角20°)
当天线增益符合上述要求时,整机灵敏度应符合技术指标要求。同时整机在PCB布板时,应综合采用器件合理布局、良好接地、电源滤波、电磁屏蔽等措施,最大程度降低传导干扰和辐射干扰,方可使灵敏度达到设计要求。
4.2 捕获策略
首次定位时间和失锁重捕时间是决定用户机RNSS性能的两项重要指标。卫星列表决定了卫星的捕获顺序,通过优化卫星列表排列策略,精确计算P码时间不确定度,可缩短捕获时间,进而缩短首次定位时间和失锁重捕时间。
4.2.1 卫星列表“3+1+N”策略
卫星仰角越高,信号强度越强,越容易捕获;卫星几何分布(DOP值)好,定位可信度就高[10]。因此卫星列表的排列应兼顾卫星仰角和卫星几何分布,卫星排列顺序可依次设置为3颗GEO卫星、1颗MEO/IGSO卫星、N颗剩余卫星,以达到快速、可靠定位的目的。
4.2.2 时间不确定度的精确计算
P码时间不确定度是P码捕获的一个重要参数,直接影响P码的捕获速度。在P码时间不确定度足够准确的条件下,时间不确定范围越小,捕获的速度越快。P码时间不确定度的计算公式如下:
P=Δ+τ
(2)
其中:P为P码时间不确定度;Δ为钟差不确定范围;τ为信号传播时延。
在不同的场景下,可以通过先验信息精确估计,从而获得P码时间不确定度的精确范围,优化捕获时间如表1所示。
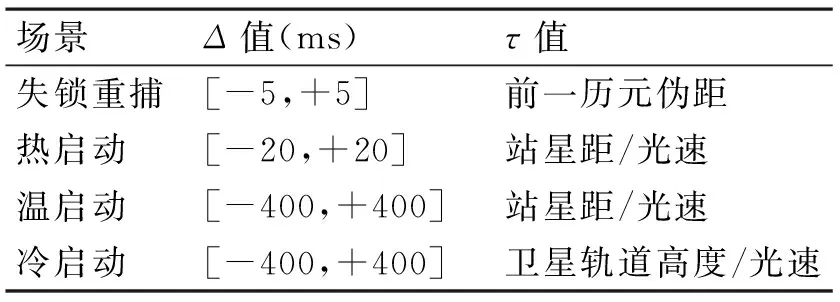
表1 不同场景下时间不确定度的设置
采用上述捕获策略后,首次定位时间和失锁重捕时间得到明显优化,如表2所示。

表2 重捕与首次定位时间优化对照表
4.3 导航电文处理策略
导航电文的处理策略分为三部分:导航电文的解析、导航电文的存储和导航电文的提取。
4.3.1 导航电文解析
导航电文的解析分两步进行处理,即导航电文预处理、电文解析,如图8所示,其中导航电文预处理完成后,通过队列和事件触发的方式通知导航电文解析模块;电文解析模块负责分别对I支路和Q支路导航电文进行解析,并负责检查当前原始电文数据库的收集状态,如果有收齐的,则按照电文存储策略进行存储或更新。
4.3.2 导航电文存储
在实际过程中,为了保障导航电文使用的便利性和正确性,采取了将导航电文分三类存储的策略,即实时原始导航电文的存储、用于PVT解算的导航电文存储和用于上电后快速定位的原始导航电文Flash存储。如图9所示。
4.3.3 导航电文提取
导航电文的提取分为两部分:一是开机启动时,根据用户机工作模式,先从Flash中提取存储的星历参数和历书参数,如果有效则更新PVT数据库,用于快速定位解算;二是正常定位解算过程中,定义了一个统一的导航数据接口,按导航电文类型提取电文参数,参与定位解算,保证了电文数据的准确性。
4.4 低功耗设计
手持双模型用户机有明确的功耗要求,同时应尽量降低运行功耗,延长电池的使用时间,以满足8小时续航时间的指标要求。主要采取了以下低功耗设计:
1) 选用低功耗、高集成度的器件;
2) 选用高效的电源方案,合理分配功耗;
3) 分时分区的电源管理策略;
4) 动态功耗调节。
采用上述低功耗设计后,手持双模机的运行功耗从4.2W降低到3.1W,长时间待机功耗降低到2.6W,不仅满足功耗指标要求,也使整机满足低温续航8小时的要求。
5 实验与结论
为了验证北斗用户机在实星状态下的使用性能,重点从接收灵敏度、RNSS定位精度、RNSS首次定位时间、RDSS定位/通信成功率等方面进行了试验,试验方法及结果如下。
5.1 接收灵敏度
在实星测试时,接收灵敏度的测试按照用户机实际输出的载噪比作为参考依据。 在开阔无遮蔽的环境下,用户机仰角90°度放置,记录连续12小时的GEO卫星载噪比数据,计算平均值。统计平均载噪比数值为42.4dB。载噪比达到实星状态下用户机灵敏度的使用要求。
5.2 定位精度
1) 静态试验
静态试验以某点为基准点,统计北斗用户机水平、高程方向的测量值与基准点差值的绝对值,12个小时的定位精度曲线图如图10所示,定位精度统计表如表3所示。
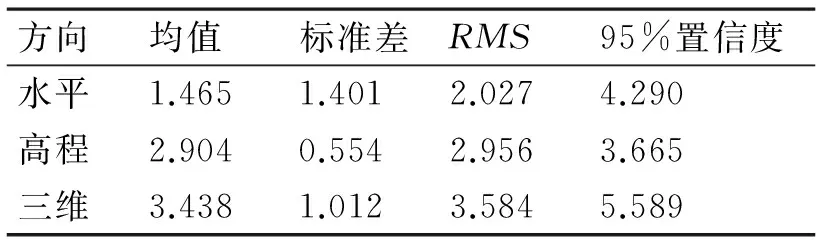
方向均值标准差RMS95%置信度水平1.4651.4012.0274.290高程2.9040.5542.9563.665三维3.4381.0123.5845.589
2) 动态试验

表4 跑车试验北斗用户机定位精度统计表
动态跑车试验以测量型接收机RTK测量定位数据为基准,统计北斗用户机高程、水平方向上实际测量值与基准点的绝对差值,定位精度曲线图如下图11所示,定位精度统计表如表4所示。
由上述结论看出项目组研制的北斗双模型用户机在静态、动态使用条件下定位精度均能够满足≤10m要求。
5.3 RNSS首次定位时间
对热启、温启、冷启和失锁重捕在实星条件下测试20次,统计均值、最大值、最小值结果,如表5所示。

表5 首次定位时间与重捕统计表
5.4 RDSS定位成功率/通信成功率
通过静态拷机和动态跑车试验分别对北斗用户机的RDSS定位和通信成功率进行了测试,结果如表6所示。

表6 定位通信成功率统计表
6 结语
由以上试验结果看出项目组研制的北斗双模型用户机在接收灵敏度、RNSS定位精度、RNSS首次定位时间、RDSS定位/通信成功率等方面均达到比较理想的水平。
[1] 谭述森.卫星导航定位工程(第2版)[M].北京:国防工业出版社, 2010:15-16.
[2] 北斗网[EB/OL].http://www.beidou.gov.cn/201120665aa4ca6661147028cacd.html.
[3] 谢钢,GPS原理与接收机设计[M].北京:电子工业出版社,2009:13-14.
[4] Elliott D.Kaplan,Christopher J.Hegarty.寇艳红.GPS原理与应用(第二版)[M].北京:电子工业出版社. 2007:21-22.
[5] 张雄伟,DSP集成开发与应用实例[M].北京:电子工业出版社,2002:78-79.
[6] 三恒星科技.TMS320C6747 DSP原理与应用实例[M].北京:北京电子工业出版社,2009:67-68.
[7] Texas Instruments Inc.Code Composer Studio User′s Guide[M]. 2000:34-35.
[8] ARM官方站点[EB/OL].http://www.arm.com/.
[9] 张冬泉,谭南林,王雪梅等,Windows CE实用开发技术[M].北京:电子工业出版社,2006:9-16.
[10] 周文宏,影响GPS定位精度的因素及改进方法[J]. 安徽科技,2009(9):49-51
Design and Implementation of BeiDou Double Model Receiver
ZHANG Liwei1LIU Zhaolei2XIN Yuekuan2ZHAI Xiongzhi2
(1. Navy Representative office in 707 in Tianjin, Tianjin 300000)(2. CSSC Marine Technology Co., Ltd, Beijing 100071)
Based on BeiDou double model receiver development as the background,this paper firstly introduces the operating principle and composition of BeiDou double model receiver, and then describes the overall scheme design mainly from the hardware design and the software design. Then the key technologies are described in this paper involve four designs, that are sensitivity, harvesting policy, navigation text processing policy and low power consumption. And finally the experiment conclusions and test results are given in the paper.
BeiDou receiver, BeiDou double model receiver, harvesting policy
2016年8月12日,
2016年9月28日
张礼伟,男,工程师,研究方向:卫星导航、质量管理。刘召磊,男,工程师,研究方向:卫星导航。辛月宽,男,工程师,研究方向:卫星导航。翟雄志,男,工程师,研究方向:卫星导航。
TN927
10.3969/j.issn.1672-9730.2017.02.013
猜你喜欢
空军工程大学学报(2021年2期)2021-05-29
兰州理工大学学报(2021年1期)2021-03-09
中国外汇(2020年7期)2020-07-10
中国新通信(2020年3期)2020-07-06
中国电子报(2019年55期)2019-10-24
通信产业报(2019年26期)2019-08-30
制导与引信(2018年2期)2018-11-09
办公自动化(2016年20期)2016-12-18
移动通信(2014年18期)2014-11-04