
基于ARM的智能公交车载控制终端的设计
2017-02-20 09:16黄建昌孙婷婷蔡雅琨
数码世界 2017年2期
黄建昌 孙婷婷 蔡雅琨
河北农业大学理工学院
基于ARM的智能公交车载控制终端的设计
黄建昌 孙婷婷 蔡雅琨
河北农业大学理工学院
本文设计的智能公交系统基于ARM处理器LPC1766作为主控制芯片进行设计,具体阐述了智能公交的总体框架以及车载主控制系统的软硬件实现过程,并着重介绍了车辆运行过程中GPS定位、车辆和控制台的GPRS通信、车辆和路牌之间的ZigBee通信、语音自动报站技术的原理与具体实现。
智能公交系统 ARM GPS ZigBee技术
1 引言
随着我国经济社会的快速发展,城市交通需求和供给的矛盾日益突出,人们对于公交服务水平有着越来越多的要求,因此,建设智能化的公交系统变得更为重要。目前国内的智能公交系统建设主要集中在车辆调度、视频监控、信息采集等,但对于公交自动报站,信息动态发布以及远程控制等方面还不够成熟,实际应用也很少,所以建设一整套集GPS定位、GPRS通信,远程控制,自动报站,信息发布等技术的智能公交系统,并具体运用到实际中去,对当今日益严峻的交通有着重要的意义。
2 智能公交系统硬件结构
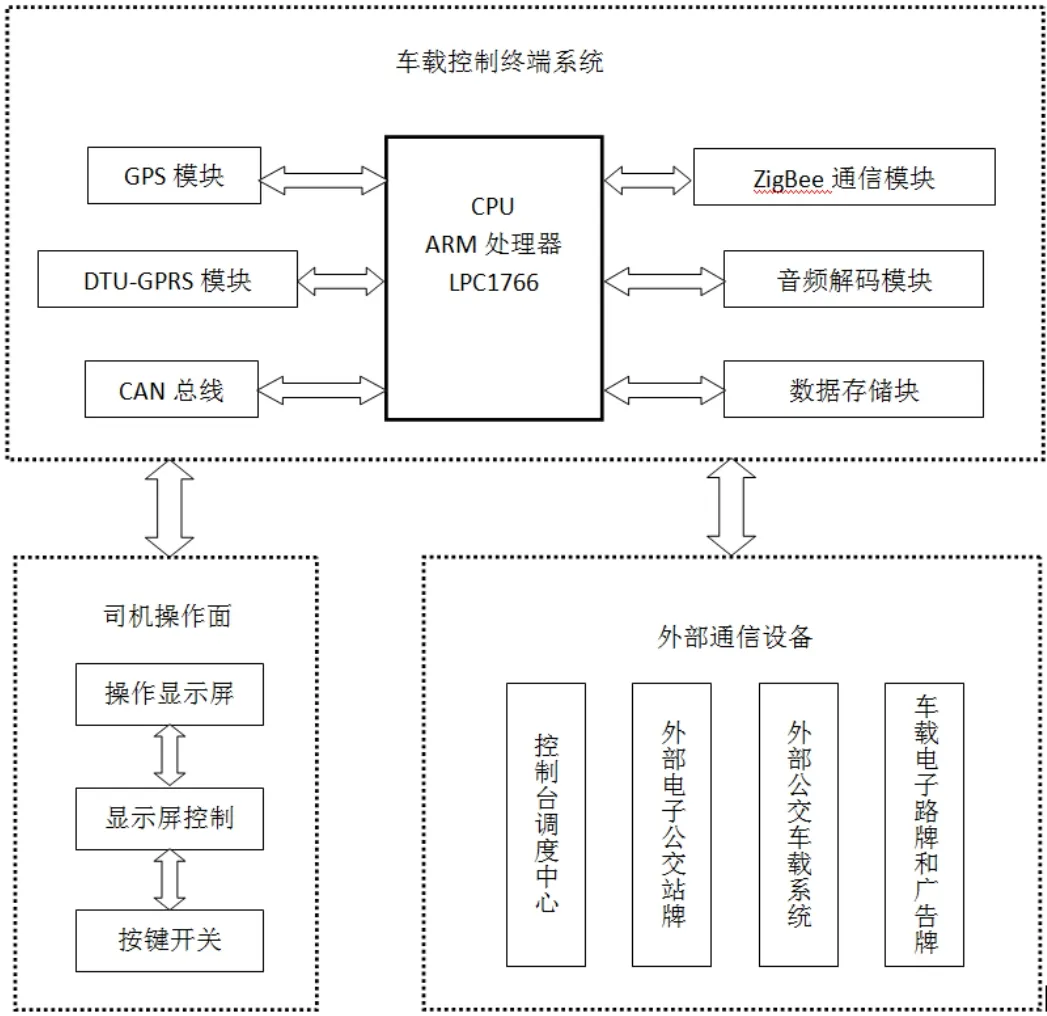
图1 智能公交系统结构图
智能公交系统是利用卫星定位系统(GPS)、移动通信系统(GPRS)、ZigBee技术、信息采集技术、视频监控技术、计算机网络技术等科技手段,建立电脑营运管理系统实现公交调度智能化、自动化的语音报站、自动化站名显示、自动化客流统计、自动化电子站牌显示、自动化视频实时监控等功能,真正实现了公交智能化,人性化。如图1所示,以LPC1766处理器为核心,外加各种通信模块构成了是本文设计的智能公交系统。
3 智能公交系统功能原理
基于智能公交系统的需求分析,本系统各模块的功能原理如下:
(1)GPS模块接收GPS数据,实现公交车辆的实时定位;
(2)通过DTU-GPRS模块把公交运行中采集的所有数据信息传送给公交控制台,实现对公交车辆的调度管理和信息发布;
(3)通过ZigBee通信模块与公交电子站牌进行通信,并基于音频解码模块实现公交车的自动化语音报站功能;
(4)公交车内控制终端采集的所有数据既可以通过GPRS实时发送出去,也可保存到存储模块中。
4 车载控制终端的软件实现

图2 主程序流程图
智能公交项目设计的主程序流程图如图2所示,系统上电后首先对各个功能模块进行初始化,包括:LPC1766各端口的初始化、ZigBee模块初始化、GPRS-DTU初始化、GPS初始化等。CPU采用串口中断的方式,读取GPS的定位信息,采用定时中断的方式判断是否用无线数据通信模块GPRS-DTU发送信息给调度中心。
5 系统展示
智能公交系统如图3所示,整个系统大致由三部分构成:车载控制终端电路板、显示屏控制电路板(包括按键)、显示屏。

图3 系统整体实物图
6 结论
本文从LPC1766控制器的基础理论入手,介绍了该系统的构建过程,以此设计了应用于客车的车载控制系统。该系统不仅能够实现公交调度智能化、自动化的语音报站、自动化站名显示、自动化电子站牌显示、自动化视频实时监控等功能,而且通过友好的人机交互界面,真正实现了公交智能化,人性化,相关产品已投入西安某公交公司试点运营。
[1]张引,陆百川.智能公交系统概述[J].中国水运,2008(8)
[2]潘良.基于ARM的智能公交车载终端的设计与开发[D].湖南:湖南大学硕士论文,2009:6-11
[3]Mengqi Zhang.The design and implementation of automated smart car system based on camera[C]. Beijing: International Conference,2011
[4]全海强.基于ARM的智能公交车载终端系统设计开发[D].西安:西安电子科技大学硕士论文,2012:5-7
[5]Valencia.Euro American Conference On Telematics And Information Systems. Wireless sensor networks and service-oriented architecture, as suitable approaches to be applied into ITS [C].May.2012
猜你喜欢
民间故事选刊(2021年11期)2021-11-12
今日农业(2021年8期)2021-07-28
学苑创造·A版(2019年5期)2019-06-17
儿童故事画报·智力大王(2018年1期)2018-10-30
无线互联科技(2017年10期)2017-06-22
科技创新导报(2016年28期)2017-03-14
考试周刊(2016年104期)2017-01-19
小学生·多元智能大王(2014年8期)2014-08-28
