
轻小型无人机在房屋建筑结构类型调查中的应用1
2017-02-08 05:37窦爱霞袁小祥
震灾防御技术 2017年4期
邓 飞 窦爱霞 袁小祥
轻小型无人机在房屋建筑结构类型调查中的应用1
邓 飞 窦爱霞 袁小祥
(中国地震局地震预测研究所,北京 100036)
房屋建筑结构数据是了解房屋抗震设防能力的基础,获取房屋建筑结构信息具有重要的现实意义。本文在简单介绍无人机遥感系统、房屋建筑信息无人机遥感调查技术流程的基础上,以全国多地多架次飞行任务为应用实例,对无人机照片进行筛选、姿态匹配、照片拼接、纹理映射等处理,获取了房屋建筑密集区的正射镶嵌图和三维场景模型,然后对房屋建筑结构类型进行目视判读,并与地面调查的真实结果比对分析,计算得到目视判读的准确率为91.17%,Kappa系数为0.80。结果表明,轻小型无人机轻便灵活,获取的三维场景模型能有效、直观、准确地进行房屋建筑结构类型判定,可弥补传统实地调查的不足,为评估大范围建筑物的抗震能力提供重要的参考依据。
轻小型无人机 房屋建筑结构 正射影像 倾斜摄影 三维重建
引言
地震灾害是当今危害人类最严重的自然灾害之一,其中地震引起的建筑物破坏是造成人员伤亡和经济损失的主要原因(周正华等,2008;余世舟等,2014)。房屋建筑结构数据是了解房屋抗震设防能力的基础,也是发生地震后评估建筑物震害的重要信息。国内已有许多学者开展了对房屋建筑结构、抗震性能的研究分析,多采用传统实地调查的方法(李书进等,2010;杨钦杰等,2016)。传统实地调查或问卷调查的方法获得的数据准确性较高,但存在耗时长、成本高、工作效率低等缺点。近年来迅速发展的无人机遥感技术凭借其机动灵活、作业成本低、快速响应拍摄任务、影像空间分辨率高等特点,在房屋建筑信息调查方面有较广泛的应用。文献(鲁恒等,2011;丁文锐等,2015;胡勇等,2016)中采用不同方法提取无人机影像中的建筑物,获取建筑物面积;也可利用无人机影像研究建筑物抗震能力(和仕芳等,2016),提取地震灾区房屋建筑物并进行地震烈度遥感评估(王晓青等,2015);此外,还可利用无人机倾斜摄影技术进行建筑物三维建模(曲林等,2015;李颀,2016),服务于智慧城市建设。
目前,利用无人机遥感技术进行房屋建筑结构调查的相关研究较少,已有的少量研究也是采用油动型或旋翼型无人机。然而,油动型无人机体积相对较大,部署操作较为复杂;旋翼型无人机操控难度相对较低,但续航时间短、数据获取能力有限。基于以上不足,本文尝试利用轻小型电动固定翼无人机,以获取的正射、倾斜影像为数据基础,初步探讨正射镶嵌图和三维场景模型相结合的目视判读方法在房屋建筑信息调查中的应用,研究基于无人机遥感技术调查房屋建筑结构类型的可行性。
1 无人机简介
1.1 无人机遥感系统
无人驾驶飞机(Unmanned Aerial Vehicle,UAV)是一种集遥测遥控技术、无线通信技术、导航定位技术、定位定姿系统(Positioning and Orientation System,POS)等为一体的无人驾驶航空器。无人驾驶飞机与遥感传感器技术相结合集成的系统,可称之为“无人机遥感系统(Unmanned Aerial Vehicle Remote Sensing System,UAVRSS)”(Watts等,2012;李德仁等,2014),该系统组成如图1所示。

图1 无人机遥感系统的组成(李德仁等,2014)
1.2 实验所用的无人机与载荷
与油动型无人机相比,固定翼型无人机具有部署操作简单、机动灵活等特点;与旋翼型无人机相比,其又有续航时间久、飞行高度高等优势,可获取较大范围的遥感数据。因此,在满足起降场地的前提下,本研究采用飞马F系列轻小型固定翼无人机(图2),规格性能参数如表1所示,其具有飞行高度高、速度快、续航时间久、抗风能力强等特点。该系列无人机采用双频差分GPS定位系统,可提供厘米级POS数据,实现无控制点或稀少控制点成图,分别搭载全画幅相机、倾斜摄影相机两种载荷,经数据处理后可获取正射镶嵌影像和三维场景模型。
无人机正射镶嵌图覆盖范围广、空间分辨率高,可用于宏观地了解整个区域地物(如房屋建筑)空间分布、量测地物面积大小等。但其只能提供地物顶部信息,对地物立/侧面信息的了解存在局限性,而无人机倾斜摄影技术可弥补正射影像的不足。
无人机倾斜摄影技术以无人机为平台,搭载多台传感器,以垂直、倾斜等不同角度采集数据,获取的地面地物信息更加全面、丰富、准确(张祖勋等,2003;王伟等,2011)。本实验使用深圳飞马机器人“1+2”倾斜相机系统(如图3(a)),其较为轻便,能获取范围相对较大区域的数据。该系统与五相机倾斜系统(图3(b))的工作方式不同,其作业原理是首先通过下视相机获取垂直影像,然后两台倾斜相机按照航线往返摄影获取4个方向的倾斜影像,最终获取前、后、左、右倾斜和垂直5个方向的影像。所以,该“1+2”无人机倾斜相机系统既可以获取目标实验区的正射镶嵌图,用于宏观把握航拍区域地物的空间分布、面积、数量等基本特征,又可获取倾斜影像,实现具有一定高度的地物三维模型重建,用于识别地物的立/侧面信息,更真实、直观、全面地反映地物的实际情况。

图2 固定翼型无人机实体图
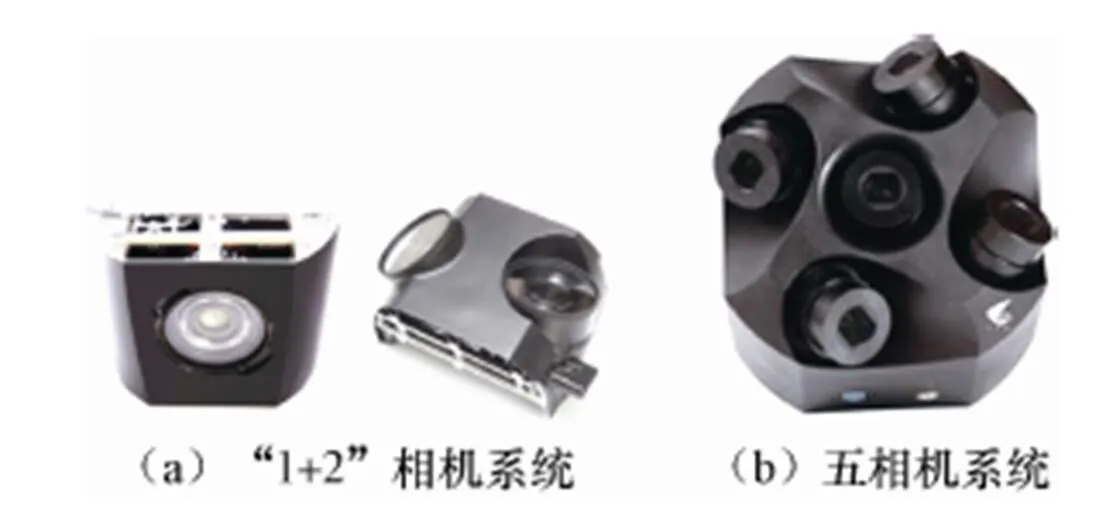
图3 多角度相机系统

表1 F200飞马无人机规格性能参数
2 房屋建筑无人机遥感调查的技术思路
基于轻小型固定翼无人机航摄技术的房屋建筑信息调查技术路线主要包括计划准备、航飞实施、数据处理以及实地详查等4个阶段,每个阶段具体实施内容和流程如图4所示。下面简单介绍计划准备、航飞实施阶段需要注意的事项,重点介绍无人机数据处理和实地调查阶段的内容。
固定翼型无人机对起降场地有一定的要求,在计划准备阶段应保证选择的起降场地视野开阔、远离大功率无线电发射源、远离水域及禁飞区(如:机场、边境线、军事设施区)。而航飞实施阶段需要注意的是:飞机返航后,现场检查数据质量,主要包括影像色彩和明暗度、有无POS数据及数据完整性等,若出现数据质量问题,应采取重飞或补飞的措施。
数据处理主要包括航拍相片与POS数据匹配、影像畸变差改正、空三解算、相片拼接、纹理映射、三维模型重建等步骤。数据处理借助现有无人机数据处理软件photoscan完成,最终可得到正射镶嵌图和三维场景模型。由于航摄区域往往覆盖范围广、数据量较大,且包括了多种地物类型,而本文关注的是房屋建筑,为了减少数据处理时间、提高处理效率,选择覆盖建筑物密集区的相片进行处理。数据处理完成后,利用地理信息软件ArcMap10.1和Smart3D软件的Acute3D Viewer模块分别对正射镶嵌图、三维场景模型进行可视化,根据解译标志,利用目视判读的方法完成对房屋建筑信息的识别,并将目视判读结果录入在ArcMap10.1软件中。
实地详查阶段主要是验证目视判读的房屋建筑信息(本文关注的结构类型)的准确性,是评价工作成果的重要阶段。精度评价以抽样调查的方法,进行实地调查和现场拍照,记录建筑样本结构类型并以实地调查的建筑结构类型为准确数据,在室内与目视判读结果进行比对,最终验证目视判读方法是否可行。房屋建筑抽样以样本尽量包含各居民点(农村居民点、城市居民点和乡镇驻地等)、多种房屋结构类型为原则。

图4 房屋建筑无人机遥感调查的技术路线图
3 应用实践
基于上述技术思路,在安徽滁州、安徽六安、四川老北川县城、山西代县等地进行了基于无人机航摄的房屋建筑结构信息调查,航摄区域包括农村居民点、城市居民点和乡镇驻地。本文主要介绍在安徽省六安市(实验区1)和四川老北川县城(实验区2)的应用情况。
3.1 实验区与航摄数据
实验区1位于安徽省六安市裕安区,包括徐集镇、平桥工业园两个航摄区域(如图5(a)),属于丘陵地区,海拔35—50m,地势相对平坦。平桥工业园正射影像获取时间为2016年11月11日,天气晴好,数据质量高;徐集镇数据(包括正射和倾斜影像)、平桥工业园倾斜影像获取时间分别为2016年12月11日、12日,天气阴、有云层,光线偏暗。因无人机在低空飞行,有云层时可同样获取影像。实验区2位于四川省绵阳市老北川县城曲山镇(如图5(b)),是2008年汶川地震受灾最严重的区域之一,四面群山环绕,海拔627—1068m,高差大,地形复杂。航摄时间为2016年12月21日,天气阴转多云,选择在中午时分光线较好时进行了航拍。各试验区航摄情况如表2所示。

图5 实验航摄区域

表2 无人机航摄数据信息表
3.2 数据成果与分析
按照数据处理流程,选择覆盖房屋建筑密集区的相片进行处理,得到数据成果的正射镶嵌图与三维场景模型,各实验区数据成果局部展示如图6。比较表2和图6,正射航摄通常航高相对较高,获取房屋建筑范围较广,能直观获取航摄区域房屋建筑的空间分布、数量、面积以及房顶等信息,但难以从中识别建筑物的高度、层数、侧面纹理等信息,更难以判定房屋建筑的结构类型(图6左图)。而根据倾斜摄影技术建立的三维场景模型,可从多角度、全方位了解建筑物立体信息,可更真实地了解房屋建筑情况,弥补了基于正射影像应用的局限性,对房屋建筑结构情况有很好地初定(图6右图)。

图6 正射镶嵌图(左图)与三维场景模型(右图)
以图6(a)六安徐集镇为例,从左侧的正射镶嵌图可以统计出房屋建筑共有58栋,通过ArcMap10.1软件的测量工具计算建筑物总面积约为13432m2。结合右图三维场景模型,该可视化区域内房屋楼层均在6层以下,4—5层建筑有13栋,2—3层建筑有27栋,1层建筑有18栋;初步判定房屋建筑以底框结构和砖混结构为主,有极少数的砖木结构。所以,正射影像和三维场景模型相结合可更加全面地了解房屋建筑信息,而三维场景模型在房屋结构识别方面有优势。
3.3 房屋建筑结构类型识别
3.3.1 解译标志
房屋建筑具有多种属性,正射影像、三维场景模型对房屋属性信息的表达各有侧重,文章针对房屋建筑结构类型进行识别。根据调查区域房屋建筑特点和地震行业建(构)筑物地震破坏等级划分规范(中华人民共和国国家质量监督检验检疫总局,2009),将房屋结构类型分为钢/钢筋混凝土柱排架结构厂房、钢筋混凝土结构、底框结构、砖混结构和砖木结构等5种结构。各类型在三维场景模型中的判读标志、三维场景模型中典型实例以及典型类型实地照片如表3所示。

表3 房屋结构判读标志
3.3.2 房屋结构判读
根据上述典型房屋建筑结构类型在三维场景模型中的判读标志和解译工作者的经验知识,利用Smart3D软件的Acute3D Viewer模块对三维场景模型进行可视化,完成房屋结构的判读过程。由于ArcMap10.1软件具有数据输入、可视化、编辑、查询和强大的空间分析功能,而Acute3D Viewer模块不具备这些功能,因此在Acute3D Viewer模块中判读房屋结构类型的同时,应在利用ArcMap10.1进行可视化的正射镶嵌图上做好相对应的判读结果记录,以便与现场调查的真实结果进行比对。
3.3.3 实地调查验证与分析
实地调查是验证目视解译结果的重要一步。本实验抽样调查了各实验区房屋建筑,总计170个样本,其中六安徐集镇60个、平桥工业园60个、老北川县城50个。经实地走访发现,实验区房屋建筑结构类型不止判读标志中5种,还包括土木结构、私自搭建的钢架棚等,但数量很少,本文统称为“其他结构”。
经过实地调查,现场拍照,与遥感判读结果比对分析,得到了混淆矩阵(Confusion Matrix),如表4,其中真实房屋建筑结构类型来自现场调查结果。本文采用准确率和Kappa系数来衡量房屋结构目视判别的精度。准确率是判读精度较为直观的表达;而Kappa系数分析法也是常用来计算分类精度的方法(Congalton,1991),其既考虑了正确判读的房屋结构类型,也考虑了各类型错分的情况。准确率为房屋样本中结构类型目视判定准确的个数与总样本个数的比值,其公式为:




根据公式(1)、(2)和混淆矩阵,计算得到准确率为91.17%,目视判读精度较高;Kappa系数值为0.80,根据文献(Feinstein等,1990;Cicchetti等,1990)对Kappa系数的分类评价标准可知,目视判读的房屋结构类型与现场调查真实的结构类型是高度一致的,说明基于无人机遥感调查房屋建筑结构类型的方法是可行的。
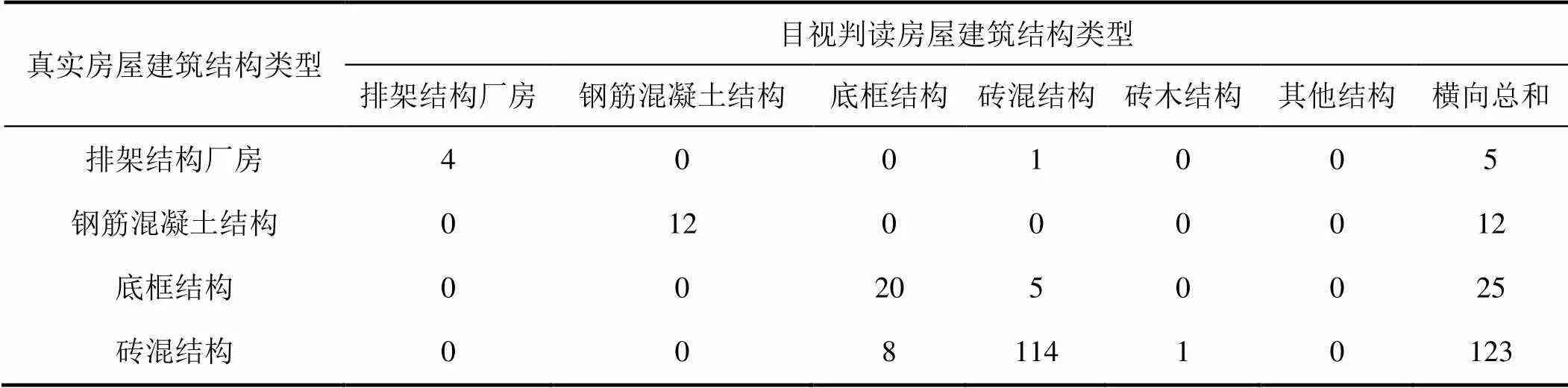
表4 混淆矩阵

续表
经过实地详查发现,调查点房屋建筑以砖混结构、底框结构为主。从表4可以看出,目视判读主要在底框结构、砖混结构之间易出现误判,这两类结构主要出现在农村、乡镇驻地。误判的主要原因是房屋结构复杂,特征不明显。如:农村居民点的低层(1—3层)建筑存在后加盖的现象,由砖块堆砌而成,无梁无柱,粉刷外墙之后难以细致判断其结构类型。此外,沿街建筑存在多种结构类型,底层商用,采用钢筋混凝土框架结构;上层居住,采用砖混结构,也存在全部采用钢筋混凝土框架结构或是砖混结构,加之判读特征不明显,易造成结构的误判。为降低误判率,可通过开展大量的事先实地走访调查,积累航摄区域房屋建筑特点的经验知识,然后再进行目视解译工作,但需要耗费大量人力物力,因此建议将来通过大量实践增加判读标志以进一步提高目视判读的准确率。
4 结论
本文以无人机获取的正射影像和倾斜影像为基础数据,经数据处理生成正射镶嵌图并建立三维场景模型,按照房屋建筑信息无人机遥感调查的技术路线,初步探讨了正射镶嵌图和三维场景模型相结合的目视判读方法在房屋建筑信息调查中的应用,研究了基于无人机遥感技术调查房屋建筑结构类型的可行性,得出了以下几点结论:
(1)正射镶嵌图、三维场景模型对房屋建筑信息表达各有侧重。前者可宏观把握建筑物的空间分布,用于了解建筑物的面积、数量以及房顶材料等信息;后者对房屋建筑侧面纹理、高度、楼层数、结构类型等有较好的表达。
(2)在应用实例中,以目视判读三维场景模型的方法识别房屋结构类型,计算得到的判读结果准确率为91.17%,准确率较高;Kappa系数为0.80,表明目视判读的房屋结构类型与实地调查的真实结果高度一致,说明基于无人机遥感调查确定建筑物结构类型方法是可行的。
(3)针对因房屋特征不明显而出现误判的情况,建议将来通过大量实践来增加判读标志来改善。同时,为建立更精细的三维场景模型,应选择天气晴好的条件下航拍,且保证无人机具有较高的航向、旁向重叠率。
丁文锐,康传波,李红光等,2015.基于MSER的无人机图像建筑区域提取.北京航空航天大学学报,41(3):383—390.
和仕芳,邓树荣,张方浩等,2016.旋翼无人机在建筑物抗震能力调查中的应用.地震研究,39(4):673—679.
胡勇,张孝成,马泽忠等,2016.无人机遥感影像中农村房屋信息快速提取.国土资源遥感,28(3):96—101.
李德仁,李明,2014.无人机遥感系统的研究进展与应用前景.武汉大学学报·信息科学版,39(5):505—513,540.
李书进,毛羚,陶立龙等,2010.湖北农村民居抗震性能调查与分析.震灾防御技术,5(1):116—124.
李颀,2016.基于倾斜摄影技术在农村房屋权籍调查测量中的应用.测绘与空间地理信息,39(6):182—183,186.
鲁恒,李永树,林先成,2011.无人机高空间分辨率影像分类研究.测绘科学,36(6):106—108.
曲林,冯洋,支玲美等,2015.基于无人机倾斜摄影数据的实景三维建模研究.测绘与空间地理信息,38(3):38—39,43.
王伟,黄雯雯,镇姣,2011.Pictometry倾斜摄影技术及其在3维城市建模中的应用.测绘与空间地理信息,34(3):181—183.
王晓青,窦爱霞,王龙等,2015.2013年四川芦山7.0级地震烈度遥感评估.地球物理学报,58(1):163—171.
杨钦杰,刘华贵,高鹏飞等,2016.广西农村民居抗震性能调查研究.震灾防御技术,11(1):100—110.
余世舟,张令心,刘琛等,2014.芦山7.0级强烈地震的城市住宅震害分析.地震工程与工程振动,34(增刊):366—371.
张祖勋,张剑清,2003.城市建模的途径与关键技术.世界科技研究与发展,25(3):23—29.
中华人民共和国国家质量监督检验检疫总局,中国国家标准化管理委员会,2009.GB/T 24335—2009建(构)筑物地震破坏等级划分.北京:中国标准出版社.
周正华,魏景芝,王玉石等,2008.汶川8.0级地震房屋建筑震害特征.震灾防御技术,3(4):384—390.
Cicchetti D. V., Feinstein A. R., 1990. High agreement but low Kappa: II. Resolving the paradoxes. Journal of Clinical Epidemiology, 43(6): 551—558.
Congalton R. G., 1991. A review of assessing the accuracy of classifications of remotely sensed data. Remote Sensing of Environment, 37(1): 35—46.
Feinstein A. R., Cicchetti D. V., 1990. High agreement but low Kappa: I. The problems of two paradoxes. Journal of Clinical Epidemiology, 43(6): 543—549.
Watts A. C., Ambrosia V. G., Hinkley E. A., 2012. Unmanned aircraft systems in remote sensing and scientific research: classification and considerations of use. Remote Sensing, 4(6): 1671—1692.
Application of Light-small Unmanned Aerial Vehicle inInvestigating Structural Types of Buildings
Deng Fei, Dou Aixia and Yuan Xiaoxiang
(Institute of Earthquake Science, China Earthquake Administration, Beijing 100036, China)
The data of building structure is the basic information of seismic fortification and to gain the data has important practical significance. In this paper we introduced a system of unmanned aerial vehicle remote sensing (UAVSS) and technique of investigating building information by using unmanned aerial vehicle (UAV). Firstly, taking some flight missions as application examples, we conducted some processing steps, which include screening photos, matching posture, stitching images and texture mapping. Then we obtained the orthographic mosaic images and 3-Dimensional scene models in building compact districts. Secondly, the structural types of buildings are interpreted by visual method using 3-Dimensional scene models, and the visual results are compared with realistic consequences of ground surveys. Finally, the visual interpretation accuracy is calculated. The value of accuracy is 91.17% and the Kappa coefficient is 0.80. The result shows that the light-small UAV is flexible and convenient. Using 3-Dimensional scene models which are acquired by UAV, we can directly and accurately interpreted the information of building structure. The approach can make up for the inadequacy of traditional field investigation and provide significant reference frame for a wide range of building aseismic capability assessment.
Light-small unmanned aerial vehicle (UAV); Building structure; Orthophoto; Oblique photography; 3-Dimensional reconstruction
10.11899/zzfy20170407
中国地震局地震预测研究所基本科研业务专项(2013IES0204);地震行业科研专项(201508010)
2017-04-11
邓飞,男,生于1991年。硕士研究生。主要从事遥感与GIS应用研究。E-mail:feid163@163.com
邓飞,窦爱霞,袁小祥,2017.轻小型无人机在房屋建筑结构类型调查中的应用.震灾防御技术,12(4):786—796.
猜你喜欢
哲学评论(2021年2期)2021-08-22
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年13期)2021-07-28
建材发展导向(2021年10期)2021-07-16
中华诗词(2019年7期)2019-11-25
建材发展导向(2019年10期)2019-08-24
建材发展导向(2019年10期)2019-08-24
建材发展导向(2019年10期)2019-08-24
中国房地产业·上旬(2018年6期)2018-05-14
中国高新技术企业(2017年3期)2017-03-30
