
基于GPS导航无人机巡线指挥系统设计
2017-02-05 01:28王勇
移动信息 2017年9期
王 勇
基于GPS导航无人机巡线指挥系统设计
王 勇
南京中设航空科技发展有限公司,江苏 南京 210000
分析了无人机的飞行原理,阐述了无人机巡查作业的系统设计规划,最后结合多年工作经验与大量资料文献,围绕基于GPS导航视角,对无人机巡线指挥系统设计进行了研究探讨,旨在提升无人机巡线指挥系统的设计水平。
GPS导航;无人机;巡线指挥系统
1 剖析无人机的飞行原理
本文涉及的无人机为四旋翼无人机。该无人机飞行需同时控制4个电机转速,以实现拉力变化。在旋转过程中,无人机桨叶除了会产生巨大拉力外,还会产生相反扭矩,而为了消除反矩力,要求把无人机前后与左右电机进行对称设计,并保证转速相同。结合已有经验,四旋翼无人机整个的飞行环节可被分成垂直升降运动(见图1)、前后俯仰运动(见图2)、左右翻滚运动(见图3)、水平偏航运动(见图四)等4部分。
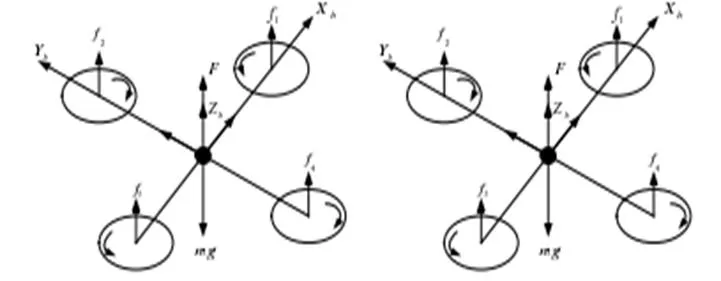
图1 垂直升降运动示意图
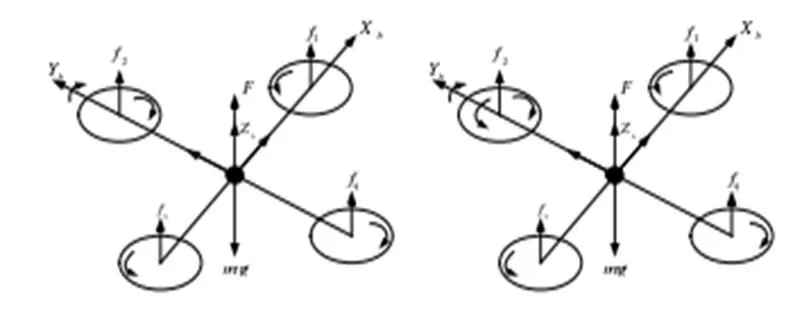
图2 前后俯仰运动示意图
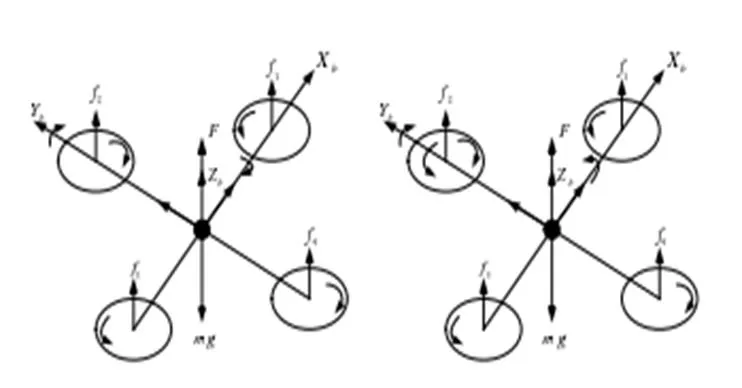
图3 左右翻滚运动示意图
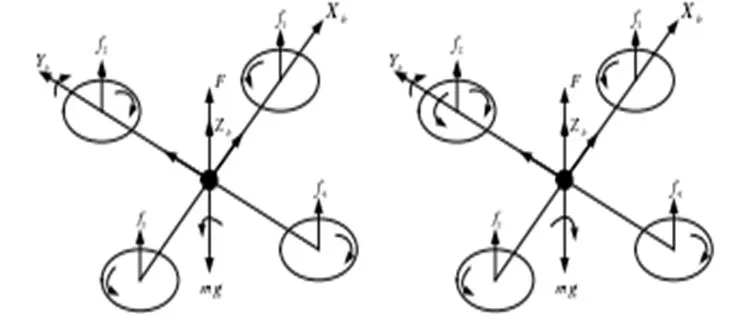
图4 水平偏航运动示意图
2 解读无人机巡检作业系统设计规划
2.1 把控关键技术
输电线路无人机巡检作业系统是一个非常复杂的巡检系统,涉及的内容较多,GPS自动化巡检、飞行数据通信、巡检图像分析处理、无人机控制和巡检地理坐标等内容均包含于其中。结合已有经验,可将无人机巡检系统分成地面监控平台、飞行器、信息传输系统和飞行控制系统等4部分(见图5)。其中,最关键的技术是无人机飞行姿态控制技术、无线通信技术和GPS导航技术[1]。
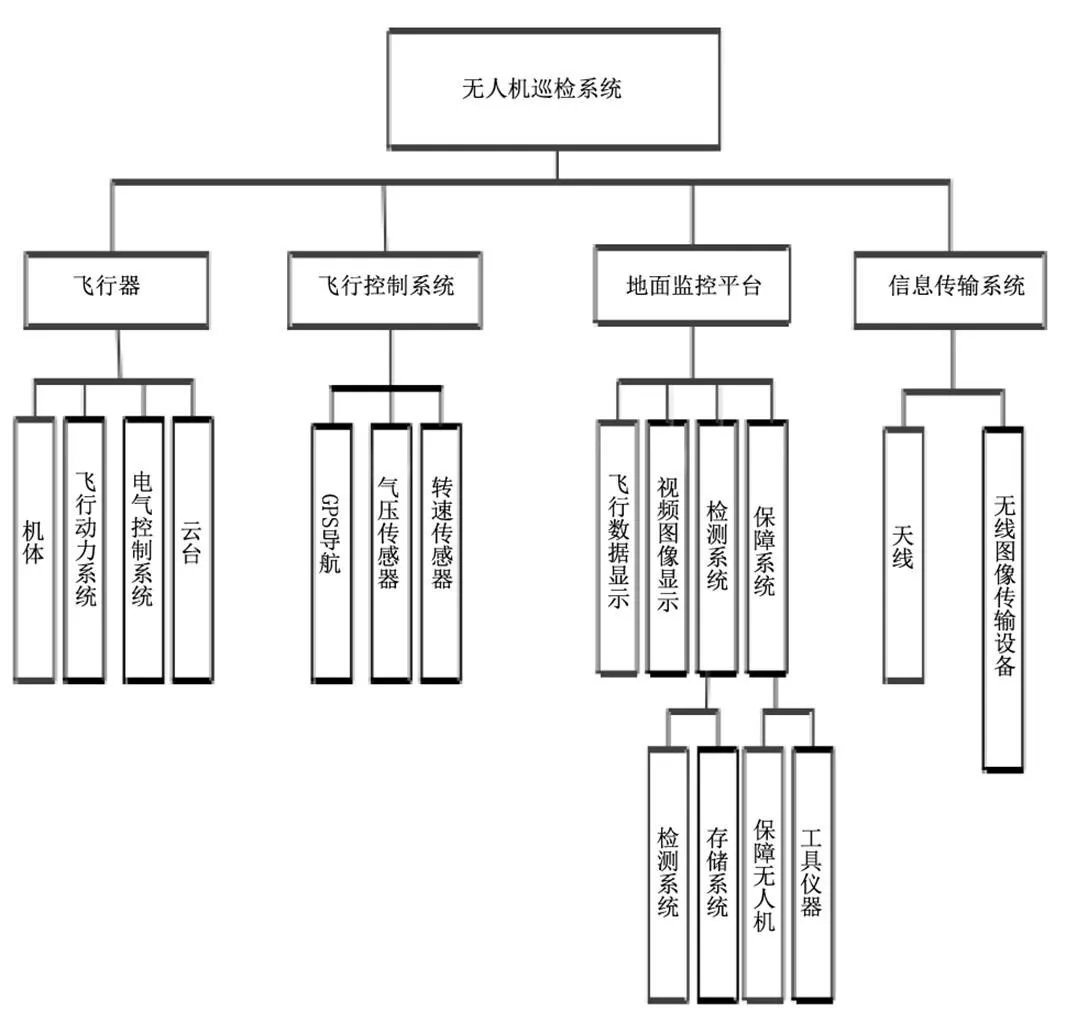
图5 无人机巡检系统构成图
2.2 有效分类与选取
首先是巡检内容分类。可将输电线路巡检内容划分成两部分:一部分为输电线路的线路走廊检测;一部分为输电线路的杆塔部件检测。第一部分所包含的内容有两种:一种为线路障碍;一种为线路故障。第一种囊括了线路内存在物体悬挂(如鸟巢)、危险建筑或超高树木等情况;第二种囊括了间隔棒断开或导地线脱股等安全问题。因输电线路有着范围宽、跨度大等特性,因而对巡检无人机的要求较高,除飞行速度快外,还要求续航和悬停时间长。
此外,输电线路杆塔主要包含了防震锤、绝缘子、线夹和金具等检测部件,因绝缘子长时间裸露在户外,历经风吹日晒,便容易出现破损、自爆、闪络痕迹等问题。
其次选择适宜机型。无人机自带动力装置,既可通过地面遥控来控制设备,又可根据智能化程序设定来控制飞行,加之具备固定翼展,因而可以被反复利用。科学技术不断发展,极大地提升了无人机的作业能力、飞行距离和飞行高度,相应地在各工业领域中也获得了更加广泛的应用。当前应用最多的无人机类型有固定翼无人机和旋翼无人机。前者相对后者来讲,具备维护方便、结构简单且飞行速度快等优点,但缺点在于存在一定结构缺陷,难以实现空中悬停,飞行转弯的弧度较大,对飞降落场的要求较高;后者虽结构相对复杂,但可通过智能程序设定或遥控装置进行控制,且对起飞与降落的场地没有过多要求,随时可实施空中悬停操作,但因携带大量设备,因而后续维护费较高。
2.3 分析无人机的巡线路径
应用无人机巡检整个作业,其前提在于拟定一个合理的飞行路径规范。在保障作业安全的基础上,稳步提升巡检工作质量与效率。具体说来,无人机巡检作业飞行线路是连续的。因此在规划路径时,应离散化路径,且在离散环节考虑无人机飞行的约束条件,即考虑安全性、可行性、高效性等内容[2]。
2.4 具体的巡检流程
作为新的一种巡检技术,无人机巡检当前还处在试验阶段,因而其中存在着很多问题需要解决,且就整个的巡检作业来讲,还未形成统一规范。结合已有经验,针对这部分内容应从作业前的准备、无人机起飞、巡检工作、图像视频传输、图像处理等内容进行。此外,针对无人机巡检作业的安全距离控制应遵循表1。
3 基于GPS导航的无人机巡线指挥系统设计
3.1 构建指挥平台系统框架
基于GPS导航视角确立指挥平台系统框架。具体来讲,需从起飞前的准备—通信控制—数据接收—数据显示—数据存储—数据处理等内容出发进行考虑。
3.2 设计无人机的起飞准备模块
设计准备作业模块应从如下内容进行:
首先,收集巡检作业现场包含着的场景信息,如金具型号、输电线路等级、导线型号、杆塔型号、输电线路导线分裂数和绝缘子片数等。根据这些信息便可以确定巡检环节拍摄到的信息准确度。
其次,掌握作业地点的天气状况和地理环境,如气温、横风、区域坐标信息和风向等。
最后,再次确认作业环境,确保无人机作业安全,保证作业质量。
3.3 设计GPS导航模块
首先,掌握坐标系统,进行投影变换。这是因为无人机巡检工作中掌握的飞行坐标信息应及时向地面指挥系统反馈,使其能根据坐标实况明确作业内容。
其次,确立导航数据格式,待GPS接收机更新具备两种数据输出功能后,即NMEA0183和二进制格式,便需要依据巡检实况选择最适宜的数据输出格式。一般而言,前一种格式涉及的数据帧由帧头、内部数据和帧尾组成。不同数据帧定义决定了不同帧头定义。
然后,提取导航数据(见图6)。
最后,显示导航数据。
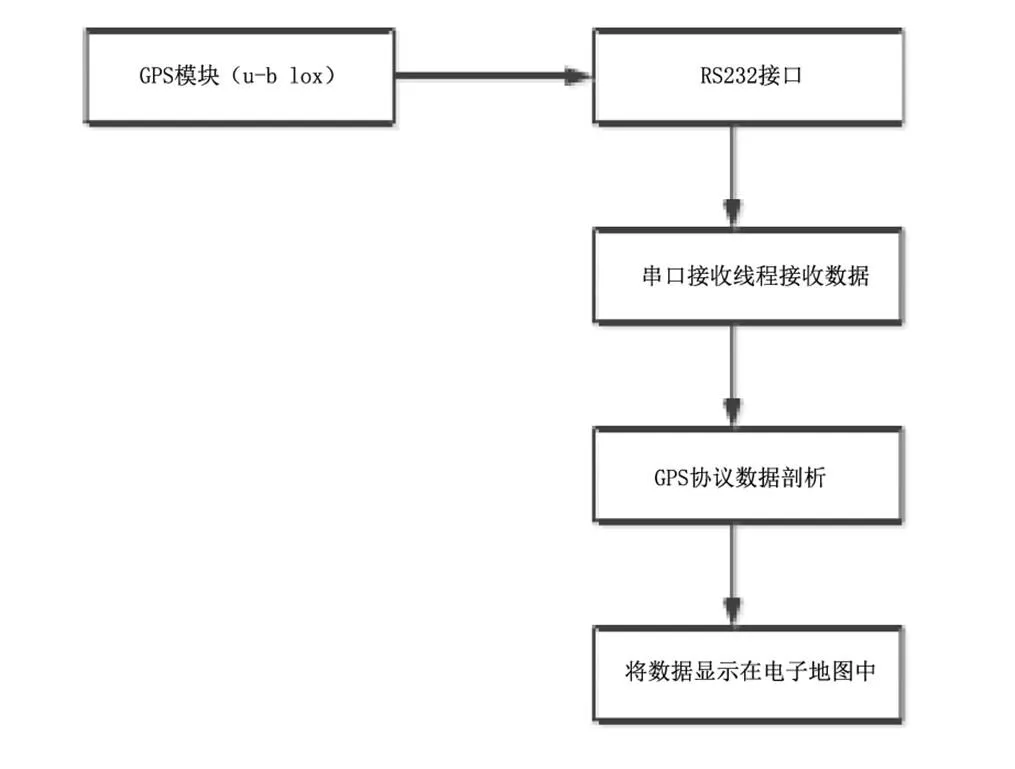
图6 导航数据提取示意图
4 总结
综上所述,科技水平迅猛发展,无人机应用的领域逐步扩大。为了更好地掌握无人机技术,本文基于GPS导航视角,对无人机巡线指挥系统设计流程进行了分析探讨。
[1]邓荣军.基于GPS导航无人机巡线指挥系统设计[D].武汉:武汉科技大学,2015.
[2]聂志彪.小型无人机导航与制导关键技术研究[D].南京:南京航空航天大学,2009.
Design of Unmanned Aerial Vehicle Patrol Line Command System Based on GPS Navigation
Wang Yong
Nanjing Central Aeronautical Science and Technology Development Co., Ltd., Jiangsu Nanjing 210000
The paper analyzes the principle of flight of UAV, and expounds the system design without planning man-machine inspection operations. Combined with years of work experience and a lot of information, around GPS navigation based on the perspective of the UAV patrol command system design are discussed, in order to enhance the design level of man-machine patrol command system.
GPS navigation; unmanned aerial vehicle; patrol line command system
V249.3
A
1009-6434(2017)9-0088-03
猜你喜欢
中国交通信息化(2022年8期)2022-10-28
机械工业标准化与质量(2022年8期)2022-10-09
智慧电力(2022年1期)2022-03-02
科技研究·理论版(2021年4期)2021-09-10
舰船科学技术(2021年12期)2021-03-29
当代贵州(2019年41期)2019-12-13
源流(2018年6期)2018-12-03
无人机(2018年1期)2018-07-05
安全(2015年6期)2016-01-19
中国扶贫(2014年8期)2014-06-27
