
焊接工业机器人视觉在焊缝跟踪中的应用研究
2017-01-24 06:42李德玲马梦蝶庞晓霞秦园园
山东工业技术 2017年1期
关键词:图像处理
李德玲 马梦蝶 庞晓霞 秦园园

摘 要:带有视觉传感器的工业机器人在实际焊接的过程中会与示教点的焊接位置产生一定的偏差,为保证焊接过程中焊枪实时处于焊缝的正上方,本文设计了一套特征点提取的处理方法,并利用OpenCV处理激光图像找出焊缝的偏差信息,确保焊接的精度和可靠性,从而实现焊接过程的智能化和柔性化。
关键词:视觉传感器;特征点;OpenCV;图像处理
DOI:10.16640/j.cnki.37-1222/t.2017.01.041
1 引言
视觉传感器基于仿生学研制而成[1]。在整个焊接过程的跟踪中,类似于人的眼睛。由视觉传感器里内置的激光器发射激光结构光到焊缝上,形成一条光带,利用传感器里面的CCD工业相机拍摄图像,使用OpenCV算法处理得出激光焊缝图像的中心点坐标,然后将其该坐标与之前示教点坐标进行比较,得出位置信息的偏差值,最后通过串口通讯和机器人控制系统,将其偏差转换为机器人关节的运动,最终实现焊缝的实时跟踪与纠偏。因此,图像处理算法的合理选择决定了激光焊缝位置坐标的准确度,从而也决定了整个跟踪系统的跟踪精度。为此,本文设计了一套图像处理算法,旨在提高视觉传感器的跟踪精度,实现焊接过程的实时纠偏和跟踪。
2 图像处理算法
OpenCV是基于VC++6.0的开放的计算机视觉库[1],所有的图像处理算法都是利用OpenCV完成的。
2.1 激光焊缝图像预处理
视觉传感器在焊接过程中采集图像会受到烟尘、弧光等的干扰。因此,要想得到焊缝准确的位置信息,就要对激光焊缝图像进行一系列处理。
2.1.1 弧光的处理
弧光对激光焊缝图像的干扰可以采取在CCD工业相机前段添加一个滤镜,该滤镜只能够过滤掉其它波长的光,只允许激光通过,这样就避免了其它杂光的干扰。
2.1.2 烟尘的干扰
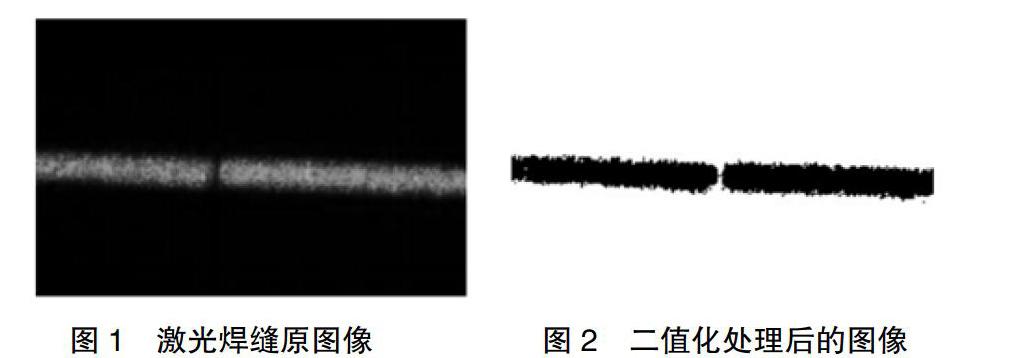
焊接的过程中会产生大量的混合气体,这些干扰对激光焊缝图像的后处理影响是很大的。虽然人的眼睛很容易识别这些干扰,但是计算机识别起来是非常复杂的,因此必须采取一定的算法对拍摄到的图像进行处理。烟尘对激光焊缝图像的影响主要表现在使激信号带减弱。因此,采用二值化处理来增强激光与其背景亮度差,使激光焊缝图像凸显出来。二值化处理也就是将图像中的像素点转换成黑色或者白色,其公式[2]是:
其中T是阈值,二值化的关键就是阈值的选择[3]。二值化增强的部分源代码[4]如下:
int main(int argc, char* argv[])
{
IplImage* src,*dst=0;
src=cvLoadImage("X:\\Y.jpg",0);
dst=cvCreateImage(cvSize(src->width,src->height),8,1);
//做阈值二值化
cvThreshold(src,dst,50,255,CV_THRESH_BINARY_INV);
……
return 0;
}
经过二值化处理后的激光焊缝图像结果如图2所示:
2.1.3 骨架提取
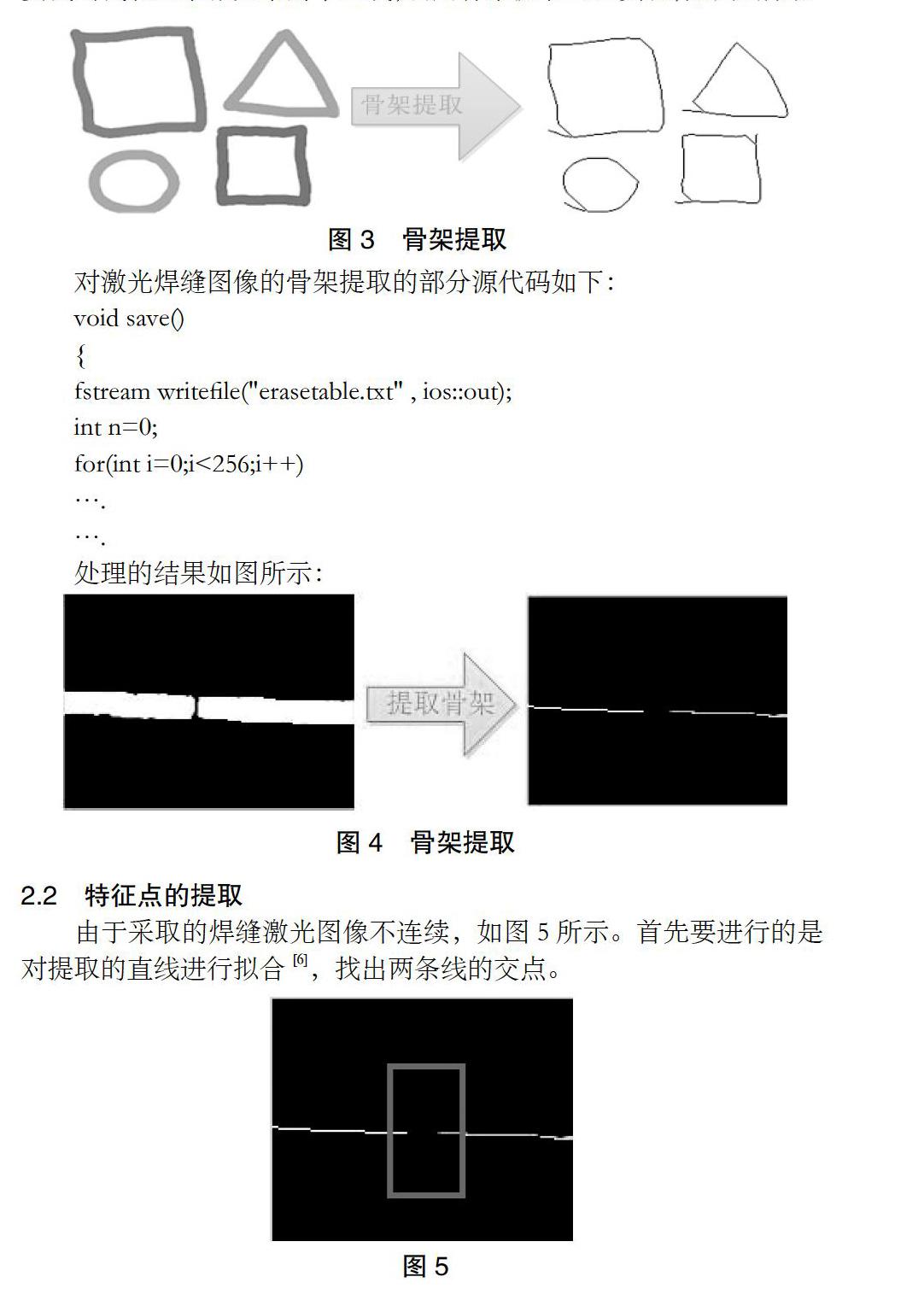
骨架提取,实际上就是得到激光图像中最有效像素的信息[5]。图像中每个像素点就代表了实际的空间。若得到焊缝的中心点坐标,就要找到代表这条激光带的中心线,利用骨架提取可以实现,如图3所示:
对激光焊缝图像的骨架提取的部分源代码如下:
void save()
{
fstream writefile("erasetable.txt" , ios::out);
int n=0;
for(int i=0;i<256;i++)
….
….
处理的结果如图所示:
2.2 特征点的提取
由于采取的焊缝激光图像不连续,如图5所示。首先要进行的是对提取的直线进行拟合[6],找出两条线的交点。
直线拟合的部分源代码[4]:
…………
// 对轮廓上的坐标进行直线拟合 计算直线方程 By = Ax + b
float params[4] , k[2] , b[2] , A , B, A1;
cvFitLine(LinesPoints[0] , CV_DIST_L2,1,0.001,0.001,params);
k[0] = params[1]/params[0];
….
….
处理结果如图6所示:
3 结论
本文以简单的二维焊缝为研究对象,设计了激光焊缝图像的处理的算法,最后提取出了特征点的位置坐标,为以后的复杂焊缝如异形焊缝等的研究提供了一定的基础,对整个工业机器人视觉跟踪系统有着非常重要的意义。
参考文献:
[1]王伟,邹奇仕,朱六妹等.视觉传感焊缝跟踪技术的发展状况及实施方案探讨[J].电焊机,2002:1-8.
[2]杨丽丽.基于图像识别的激光焊缝跟踪技术研究[D].山东大学 2006.
[3]唐刚,王龙飞,王璐.图像处理方法在焊缝自动跟踪系统中的应用研究[J].机械设计与制造,2011(12).
[4]李德玲.基于激光结构光的视觉焊缝跟踪系统研究[D].河南工业大学,2014.
[5] 张宏林编著.Visual C++数字图像模式识别技术及工程实践[M]. 人民邮电出版社,2003.
[6]王平.基于激光结构光视觉传感的焊缝图像处理[D].上海:上海交通大学,2010.
作者简介:李德玲(1987-),女,硕士研究生,研究方向:焊接机器人视觉。
猜你喜欢
今日自动化(2022年5期)2022-07-22
电脑知识与技术(2022年9期)2022-05-10
电脑知识与技术(2022年9期)2022-05-10
计算技术与自动化(2022年1期)2022-04-15
教育教学论坛(2018年5期)2018-01-22
