永磁无刷直流电机在MATLAB中的仿真研究
2017-01-19 07:26陶跃进羊乃淋
湖南理工学院学报(自然科学版) 2016年4期
陶跃进, 邓 斌, 余 丹, 羊乃淋
(湖南理工学院 计算机学院, 湖南 岳阳414006)
永磁无刷直流电机在MATLAB中的仿真研究
陶跃进, 邓 斌, 余 丹, 羊乃淋
(湖南理工学院 计算机学院, 湖南 岳阳414006)
介绍了永磁无刷直流电机的工作原理, 建立了其数学模型, 然后在MATLAB/Simulink中建立了其转速单闭环PI控制的调速系统的仿真模型, 最后对其仿真结果进行了分析. 仿真结果表明, 电机在空载和带载情况下, 具有较好的动静态特性.
无刷直流电机; 数学模型; 单闭环; 建模和仿真
引言
永磁无刷直流电机(BLDCM)具有起动转矩大以及调速方便等优点, 在家电和汽车行业应用广泛. 在使用之前, 相关从业者如果能熟悉其工作性能, 能够节省大量人力和物力. 比如在应用之前, 如果能够通过仿真软件对其进行建模和仿真, 对电机的结构以及工作特性进行详细了解, 那为其之后的使用可以提供极大的方便. 正是针对此情况, 本文对永磁无刷直流电机进行了仿真研究, 研究了其在空载起动和带负载情况下的工作特性, 可以为科研人员研究电机的应用提供一定的借鉴作用.
1 永磁BLDCM的工作原理介绍
为了便于分析, 本位以二相导通星形三相六状态的工作方式对其工作原理进行介绍, 无刷直流电机供电系统的基本结构如图1所示[1].
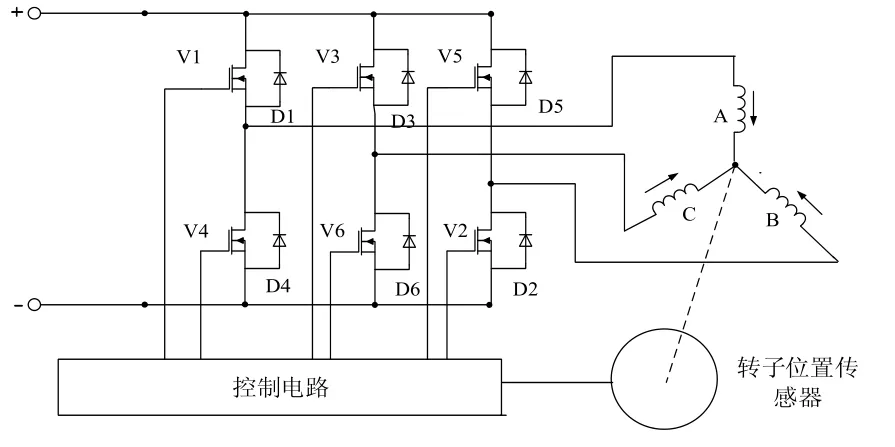
图1 三相六状态永磁无刷直流电动机系统结构
当永磁体位于图2(a)所示位置时, 可以得到转子转速信息. 经过运算将转速信息转化为电压信号, 然后经过逆变器, 开通开关管V1和V6, 电机定子绕组A相和B相有电流流过, 电流方向是从A相流进, B相流出. 因此在电机内产生磁势FA, 由磁势产生磁场, 这个时候定子与转子由于磁场相互作用, 产生电磁转矩, 转子转动, 其转向为磁势的旋转方向. 电机系统供电电路电流方向为: 电源正经过功率管V1, 通过电机定子绕组A相, 然后到定子绕组B相, 再经过功率管V6管, 最后回到电源负. 当转子转过60°电度角,到图2(b)所示位置时, V6管截止, 此时功率管V2开通, 同时功率管V1仍处在开通状态. 因此电机定子绕组A相和C相导通, 电流流向从定子绕组A相流进, 从定子绕组C相流出. 同样在电机系统上产生合成磁势FA, 定子和转子磁场继续相互作用拖动转子继续顺时针转动. 电流通路为: U+→V1→A相→C相→V2→U−, 如此往复.

图2 永磁无刷直流电动机工作原理图
当转子沿顺时针每转过 60°电度角, 开关管的导通顺序为: V1、V2→V2、V3→V3、V4→V4、V5→V5、V6→V6、V1→V1、V2 . 由于转子磁场与合成磁场的相互作用, 跟随合成磁场顺时针旋转. 在图2(a)到图2(b)所示的60°电度角范围内, 转子磁场顺时针旋转, 但是定子合成磁场一直停留在图2(a)中磁势FA位置上, 直到转子磁场到达图2(b)中磁势Ff位置时, 定子合成磁场才从图2(a)中FA位置顺时针跳变成图2(b)中FA位置. 由此得出定子合成磁场在空间旋转上是断续的, 不是处于连续状态, 因此其为一种跳跃式的磁场, 而且每次跳跃的角度是60°. 逆变器中的电流方向每改变一次, 那么定子磁场方向就随之发生改变.根据以上分析, 电机系统对应六个磁场状态, 每个状态对应于逆变器中电流两相导通, 每相绕组中电流持续时间跟转子转动120°电度角所用的时间相同, 并且各个功率管导通角度为120°, 所以把这种方式称为120°导通型. 永磁无刷直流电动机系统的三相绕组和各开关管导通顺序如图3所示.
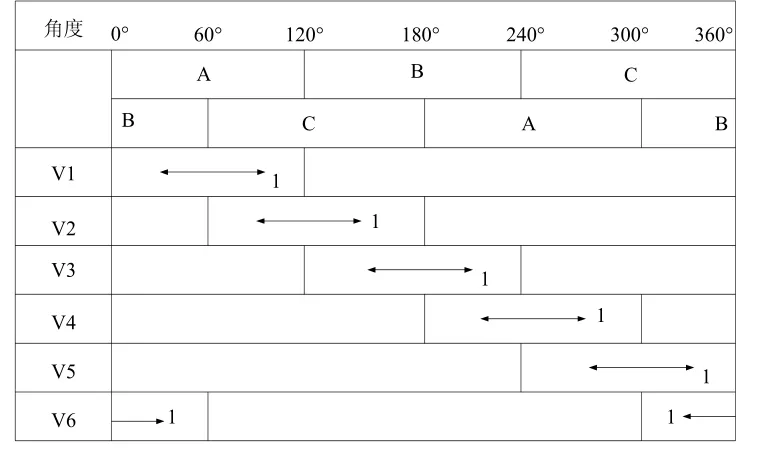
图3 三相六状态绕组和开关导通图
2 永磁BLDCM数学模型的建立
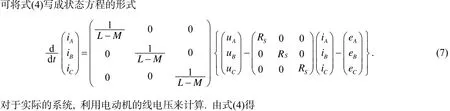
为研究方便, 作如下假设[2]: 只考虑定子基波磁场在转子中产生的感应电流, 忽略定子和转子铁损耗,忽略磁路饱和的影响; 由于定子无槽, 故可忽略齿槽反应和电枢反应; 三相绕组空间设计上完全对称, 气隙磁场为标准矩形, 定子电流为三相对称120°电角度的矩形波; 电枢绕组缠绕定子时, 保证其在定子表面均匀排列; 由于供电电流为矩形波, 为减少转矩纹波, 其气隙磁感应强度波形也应是矩形波分布. 定子三相对称绕组的相电压方程为



图4 永磁BLDCM的等效电路

3 永磁无刷直流电机的建模与仿真研究
3.1 永磁无刷直流电机的仿真模型
永磁无刷直流电机的控制系统采用转速单闭环PI控制的调速系统, 系统由ASR转速PI调节器、PWM脉宽调节器、控制运算单元、逆变器、BLDCM和位置感应器组成, 系统结构如图5所示.
根据图5所示的调速系统在MATLAB/Simulink中建立永磁无刷直流电机的仿真模型如图6所示.整个仿真模型分为两部分: 主电路部分模型和控制部分模型. 其中直流电源、逆变器和永磁无刷直流电动机组成主电路仿真模型部分. 转速给定模块、ASR转速PI调节模块、PWM脉宽调节模块和控制运算模块组成控制部分模型. 电机的参数设置: 电子电阻Rs为4.765Ω, 励磁磁通0.1848Wb, 定子电感Ls为0.0085H, 励磁脉冲宽度120°, 转子惯量J为0.008kg·m2, 极对数p为2对. ASR转速PI调节器的设置: 比例系数为10.7, 积分系数0.15[3,4].
图6所示的仿真模型中调速控制建模的思路为:由给定转速与检测到的运行转速反馈量通过一个PI转速控制器进行PI控制调节, 调节后的输出要能够控制电动机三相绕组的三相电压达到调节电动机转速的目的. 为了实现这一目的, 可采用PWM脉宽调制器, 通过调制脉冲宽度, 也就是调节占空比来调节电压. 同时脉冲信号需要控制逆变器的功率开关管的导通次序, 因此设计一个控制运算单元, 根据电动机检测到的转子位置角, 结合PWM给出的脉冲信号, 经过一系列运算, 得到最终控制逆变器的6路驱动信号, 该信号同时具有调压和调速的功能.
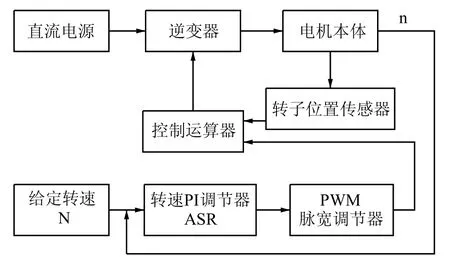
图5 永磁BLDCM的调速系统结构图

图6 永磁无刷直流电动机调速系统仿真模型

图7 转速仿真波形图
3.2 仿真结果及其分析
在给定转速为2000r/min, 电动机带1.5N·m负载起动的设置下仿真结果如图7至图10所示. 其中图7为转速波形图. 启动时电动机转速迅速上升, 在0.005s左右达到峰值, 然后迅速进入稳态, 有少许的超调, 在稳态时比较稳定, 波动比较小. 图8、图9和图10分别为定子三相中的A相线电压、A相电流波形和电机转矩波形图. 图9中的电流波形呈方波状, 在120°导通区内电流出现的波动是由于PWM调压产生的影响, 这同样会使电动机转矩产生脉动, 正如图10所示转矩仿真波形中有转矩脉动.

图8 三相线电压仿真波形图

图9 电流仿真波形图

图10 转矩仿真波形图
当电动机设置为空载启动, 在0.03s处用step模块接入1.5N·m的负载时, 电机转速和转矩的波形图如图11和图12所示. 从图11可以看出在0.03s带负载后, 转速会下降, 会小于空载转速. 从图12可以看出在空载情况下, 没有转矩脉动, 而接入负载后转矩脉动出现, 说明其稳定性变差, 因此在电机控制设计中要减小转矩脉动, 保持系统的稳定性.
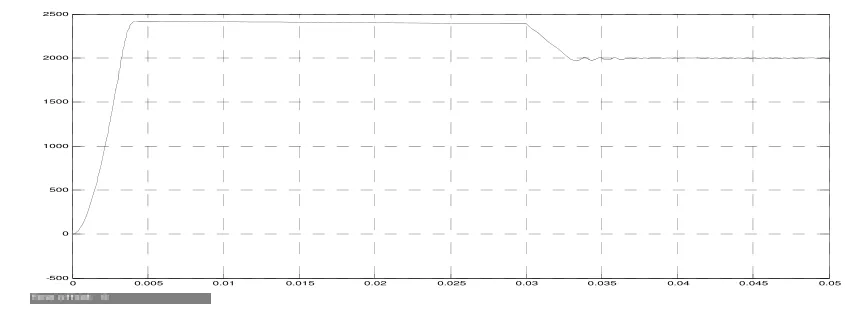
图11 空载启动转速波形

图12 转矩波形
4 结束语
通过对永磁无刷直流电动机调速系统的建模和仿真分析, 发现无论带负载启动还是空载启动, 电动机都能快速地响应, 电动机达到稳态时转速的波动很小, 稳态性能都不错. 电机在带载启动的时候, 转速能够在略微超调之后很快达到给定转速, 并维持这个转速稳定运行. 而在空载启动的时候, 电机的转速快速达到给定值后, 出现超调却没有回到给定的转速值, 而是继续以这个略微的超速继续稳定运行, 直到接入负载后转速却降到了给定的转速值然后稳定运行. 猜想这有可能是由于仿真的电动机空载时为理想情况, 没有受到实际情况下会受到的转矩阻力, 因此出现在空载时转矩波形为零.
[1] 胡崇岳. 现代交流调速技术[M]. 北京: 机械工业出版社, 2001
[2] 张林森, 谢顺依, 曾双贵, 等. 推进用永磁对转无刷直流电机的MATLAB仿真[J]. 电机控制与应用, 2010, 37(8): 1~5, 9
[3] 荣 军, 杨 航, 李 献, 等. 无刷直流电机在Matlab中的建模与仿真研究[J]. 湖南理工学院学报(自然科学版), 2012, 25(2): 55~59
[4] 洪乃刚. 电力电子和电力拖动控制系统MATLAB 的仿真[M]. 北京: 机械工业出版社, 2006
Simulation Study of Permanent Magnet Brushless DC Motor Based on MATLAB
TAO Yuejin, DENG Bin, YU Dan, YANG Nailin
(College of Computer Science, Hunan Institute of Science and Technology, Yueyang 414006, China)
This paper introduced the working principle of permanent magnet brushless DC motor, and its mathematical model was deduced, and then the simulation model of the speed control system of the PI control was established based on MATLAB/Simulink. Finally, the simulation results were analyzed, and the simulation results showed that the motor has better dynamic and static characteristics under the no-load and load conditions.
brushless DC motor(BLDCM), mathematical model, single loop, modeling and simulation
TM46
: A
: 1672-5298(2016)04-0053-05
2016-08-29
湖南省教育厅科学研究项目(16C0722)
陶跃进(1970−), 男, 湖南岳阳人, 硕士, 湖南理工学院计算机学院讲师. 主要研究方向: 计算机应用及图像处理
猜你喜欢
大电机技术(2022年5期)2022-11-17
汽车实用技术(2022年12期)2022-07-05
上海大中型电机(2021年2期)2021-07-21
防爆电机(2020年6期)2020-12-14
电子制作(2017年1期)2017-05-17
电子制作(2016年1期)2016-11-07
照明工程学报(2016年3期)2016-06-01
电测与仪表(2016年2期)2016-04-12
云南电力技术(2015年2期)2015-08-23
组合机床与自动化加工技术(2014年12期)2014-03-01