
基于激光测距仪全局匹配扫描的SLAM算法研究
2017-01-16 01:27:55葛艳茹张国伟沈宏双孙温和
计算机测量与控制 2016年12期
葛艳茹,张国伟,沈宏双,孙温和
(上海电力学院 自动化工程学院,上海 200090)
基于激光测距仪全局匹配扫描的SLAM算法研究
葛艳茹,张国伟,沈宏双,孙温和
(上海电力学院 自动化工程学院,上海 200090)
针对传统的SLAM(Simultaneous Localization and Mapping)算法构建地图时容易受环境因素和外界条件的的影响,在非线性系统状态下误差修正能力不足,且当机器人位姿都处于未知状态时,移动机器人位姿获取不精确,地图构建SLAM技术特征量的获取比较繁琐、不准确等问题;以电力巡检机器人为平台,研究了基于全局匹配的扫描算法,摒弃传统的栅格地图模型的插值方法,采用双线性滤波的插值方法,保证子栅格单元的精确性,估算栅格占用函数的概率和导数;最后采用此算法解决了SLAM地图构建的问题,并分别在室内室外环境进行实验;实验结果表明:基于激光测距仪的全局匹配扫描的SALM算法,在室内室外两种不同环境下,不受复杂背景的影响,准确地进行机器人位姿定位,以及环境地图的构建。
激光测距仪;全局匹配扫描算法;同步定位及地图构建;巡检机器人;位姿定位
0 引言
地面自主移动机器人是智能机器人领域的一个重要研究方向[1],机器人的自主移动成了当下一大热点。随着移动机器人的作业环境变的越来越复杂和非结构化,作为实现移动机器人自主运动的关键技术之一,SLAM技术已成为越来越重要的基础性难题,引起了众多学者纷纷对其进行研究。文献[2]基于改进粒子滤波的SLAM算法研究,针对粒子退化和粒子耗尽提出了两种不同的粒子改进算法,提高了算法的精确性,但是此算法需大量采样粒子,工作量大,且频繁采样,会造成粒子的耗尽。文献[3]基于CEKF的SLAM算法研究与分析,对CEKF算法进行了研究,事实证明,机器人的运动速度和变化率会产生较大的定位误差,并不可取。文献[4]基于迭代平方根CKF的SLAM算法,提出了一种迭代平方根的CKF的改进算法,利用最新的观测信息,降低CKF的估计误差,但是此改进算法容易受环境因素的影响,地图构建的精度还有所欠缺。文献[5]基于匹配的SLAM的机器人定位系统研究,采用扫描匹配的方法对机器人定位系统进行分析,但是需要对每一次扫描进行处理,大大增加了计算量。所以,本文采用基于激光测距仪的全局匹配扫描算法进行SLAM研究,旨在准确实现机器人的位姿定位,提高地图构建的准确性,最后在电力巡检机器人的平台上对此算法进行实验验证,用以验证算法的可行性。
1 激光测距全局匹配扫描的SLAM算法
全局匹配扫描的SLAM算法是一种扫描匹配算法,将当前的扫描与全局地图匹配,通过计算刚体变换解来获得机器人当前位姿,包括地图描述,扫描匹配,多分辨率地图3个部分。
1.1 地图描述
传统的占用栅格地图模型无法通过插值和微分的方法进行直接计算,无法实现要求的精确度,论文摒弃此种插值方法,采用双线性滤波的插值方法,既能保证子栅格单元的精确性,又能估算栅格占用函数的概率和导数。首先给出一个连续的坐标点,通过公式(1),公式(2),公式(3)计算出栅格地图的组成单元的占用值M(Pm)。
通过x-y轴坐标系进行线性插值得到:
(1)
其微分可以近似表示为:
(2)
(3)

1.2 扫描匹配
扫描匹配过程是当前激光扫描与参考激光扫描进行匹配,或者与机器人当前的地图进行匹配。现代的激光扫描传感器具有精度高和高频率的特点。因此,设法将激光扫描高效匹配就有可能获得很精确的结果。论文所采用的方法是将激光束的终点集和目前已知的地图尽可能地匹配。通过这种方法,没有必要再寻找激光束终点之间的数据关联。
论文采用式(4)求解ξ=(px,py,ψ)T,即:
(4)
通过这种变换从而最有效地将当前激光扫描和现有地图相匹配。其中,Si(ξ)是世界坐标下机器人坐标ξ的函数,激光终点Si=(Si,x,Si,y)T是环境特征在世界坐标下的坐标,函数M(Si(ξ))返回坐标点Si(ξ)被占用的概率值,给定某一初始的ξ,可以通过式(5)估计Δξ的值:
(5)
解出Δξ需要使用高斯—牛顿等式解决如下化简问题:
(6)
通过等式(6)我们可以得到:
(7)

R=Var{ξ}=σ2·H-1
(8)
σ是一个尺度因素,它和激光扫描器的属性有关。
1.3 多分辨率地图
论文采用多分辨率地图方式来解决基于梯度算法的方法可能会陷入局部极小值的问题,类似于计算机视觉中的图像金字塔方法,选择性的使用多层占有栅格地图,这些栅格地图的分辨率逐层减半。内存中存放了不同的地图,通过对激光扫描匹配得到的位姿估算值对这些地图进行实时更新。这一过程不仅保证了地图的连续性,同时又减小了向下采样带来的代价消耗。激光匹配过程开始用分辨率最低的那张地图,得到近似的位姿估算值,被当做下一次位姿估计的初始值。该方法会产生一种有益的伴随作用,可以立即得到粗糙的图像,进而可以用于路径规划和机器人导航等应用。
2 巡检机器人SLAM实验
2.1 实验流程
论文采用栅格地图作为输出地图,初始化地图尺寸和初始分辨率,将激光数据导入论文提出的全局匹配算法,实现地图的实时构建与机器人的定位,具体流程如图1所示。
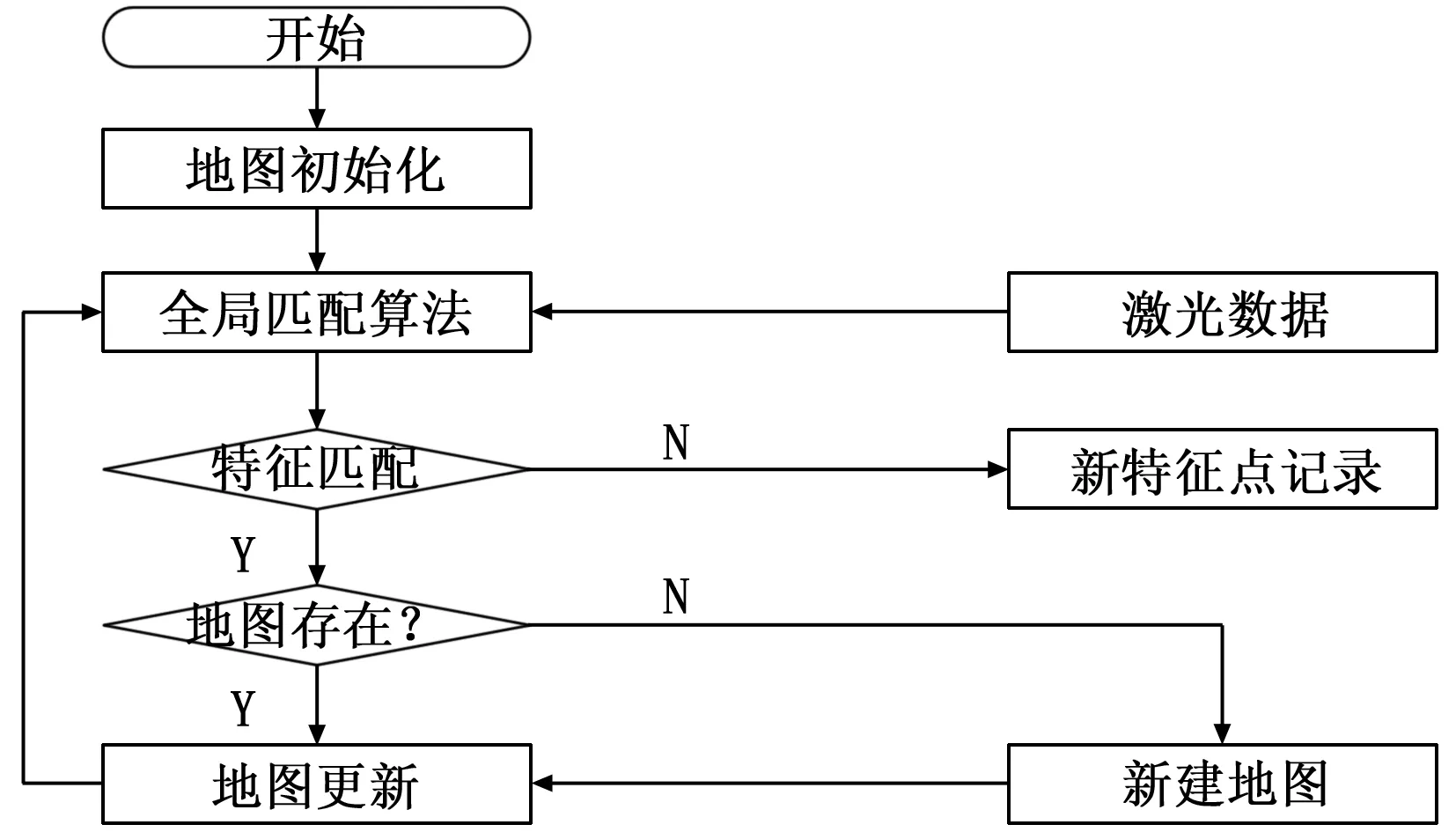
图1 基于全局匹配的SLAM算法实现流程图
2.2 实验平台
本次机器人定位和地图构建是以电力巡检机器人为平台,此平台包括硬件和软件平台。
硬件平台:激光测距仪,云台摄像机,控制主板等。如图2所示。
软件平台:Window系统下用vc2013版本开发工具开发,并用到机器人领域的MRPT(Mobile Robot Programming Toolkit)工具。
2.3 SLAM实验结果
论文分别对全局匹配算法进行了室内和室外环境实验,以便观察环境的改变对机器人位姿确定和地图构建产生的影响。首先通过遥控方式使电力巡检机器人运动一定范围,同时打开激光测距程序实时采集数据,并将数据导入论文的全局匹配算法,进行同步定位与构图。
室内环境:室内环境如图3所示,根据室内环境设置输出栅格地图尺寸为100 m×25 m,分辨率为0.1 m×0.1 m。通过遥控的方式指引电力巡检机器人平台在室内运动,采集数据进行定位与构图。

图2 巡检机器人平台 图3 室内环境
室内构图结果:通过MRPT编程工具箱GUI(图形用户界面)显示构建地图结果如图4所示。

图4 室内环境地图构建
图4中的闭合曲线表示机器人实际运行路径,其他点集表示室内地图特征。通过该图可以清晰的看出室内的特征,可见,全局匹配扫描算法的SLAM地图构建在室内环境准确的定位了机器人位姿,准确的构建出所处室内环境地图。
室外环境:设置输出栅格地图尺寸100 m×100 m,分辨率为0.2 m×0.2 m。通过遥控方式控制电力巡检机器人平台走出一条折现路径,并采集数据进行定位与构图。

图5 室外环境
室外构图结果:通过MRPT编程工具箱GUI(图形用户界面)显示构建地图结果如图6所示。

图6 室外栅格地图
图6中曲线a表示机器人实际运行路径,其他点集表示当前室外环境特征。将室外场景和机器人构建的地图对比可知,该图清晰地反映了室外折角的特征。由图(4)和(5)不难发现,无论是在室外还是室内环境中,全局匹配的扫描算法都能准确地获取机器人位姿,准确地构建当前环境地图。
3 结束语
本文研究了基于激光测距仪全局匹配的的SLAM解决方案,并针对室内室外两种环境下,利用巡检机器人平台,对全局匹配算法进行了实验验证。实验结果表明:室内室外两种不同的环境,都能够准确的定位机器人的当前位姿,构建的地图都清晰的反映了当前的环境,可见,环境的复杂程度并不会对全局匹配的SLAM研究造成很大的影响。以后将在论文的基础上,继续研究机器人的自主导航工作。
[1] 张会丽. 地面自主移动机器人路径规划算法研究[D]. 杭州:浙江大学,2013.
[2] 周旭. 基于改进粒子滤波的SLAM算法研究[D]. 南京:南京理工大学, 2014.
[3] 雷碧波. 基于CEKF的SLAM算法研究与分析[J]. 工业控制计算机, 2015, 28(10):14-16.
[4] 高 伟, 张 亚, 孙 骞,等. 基于迭代平方根CKF的SLAM算法[J]. 哈尔滨工业大学学报, 2014, 46(12):120-124.
[5] 杜钊君, 吴怀宇. 基于激光测距与双目视觉信息融合的移动机器人SLAM研究[J]. 计算机测量与控制, 2013.21(1):180-183.
[6] 魏绍清. 基于EKF-SLAM算法的室内移动机器人一致性研究[D]. 石家庄:河北科技大学,2013.
[7] Cooper A J. A comparison of data association techniques for Simultaneous Localization and Mapping [J]. Massachusetts Institute of Technology, 2006.
[8] Zhang Z. Iterative point matching for registration of free-form curves and surfaces[J]. International Journal of Computer Vision, 1994, 13(2): 119-152.
[9] 张 琦. 移动机器人的路径规划与定位技术研究[D]. 哈尔滨:哈尔滨工业大学,2014.
[10] 曲丽萍. 移动机器人同步定位与地图构建关键技术的研究[D]. 哈尔滨:哈尔滨工程大学,2013,28(10):14-16.
SLAM Research of Global Matching Scanning Based on Laser Range Finders
Ge Yanru,Zhang Guowei,Shen Hongshuang,Sun Wenhe
(College of Automation Engineering, Shanghai University of Electric Power,Shanghai 200090,China)
Targeting to tackle those problems like traditional SLAM(Simultaneous Localization and Mapping) algorithm to construct a map easily affected by environmental factors and external conditions, in the condition of nonlinear system error correction ability is insufficient, and during environment map and robot pose are unkown state, mobile robot get inaccurate, map building SLAM technology for comparison of the characteristics of complicated and inaccurate. Inspection robot for power as a platform, based on matching scanning algorithm are studied, and instead of traditional grid map model interpolation method, using bilinear filtering interpolation method, ensure the accuracy of grid unit estimate the probability and the derivative of grid takes up function. Finally, adopt the algorithm solved the problem of the SLAM map building, and respectively in the indoor and outdoor environment for experiments. The experimental results show that the SLAM algorithm of global matching scanning based on laser rangefinder, the indoor and outdoor, two different from the complex background, the influence of robot positioning accurately, as well as the environment map building.
laser range finder; global matching scanning algorithm; SLAM; inspection robot; posture positioning
2016-07-08;
2016-07-25。
上海市电站自动化技术重点实验室(13DZ2273800)。
葛艳茹(1991-),女,硕士研究生,主要从事手势识别在机器人上的应用方向的研究。
张国伟(1970-),男,副教授,硕士生导师,主要从事信息检测方向的研究。
1671-4598(2016)12-0198-02
10.16526/j.cnki.11-4762/tp.2016.12.056
TP242
A
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02 01:59:12
电子测试(2018年9期)2018-06-26 06:45:36
现代园艺(2018年2期)2018-03-15 08:00:41
现代园艺(2017年21期)2018-01-03 06:42:07
制造技术与机床(2017年3期)2017-06-23 08:11:21
光学精密工程(2016年5期)2016-11-07 09:05:55
光学精密工程(2016年4期)2016-11-07 09:05:11
湖北工业大学学报(2016年5期)2016-02-27 13:14:48
智能系统学报(2015年4期)2015-12-27 09:38:35
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:51
