
智能灭火机器人设计方案
2017-01-12 14:20董蕴慧毕征程张程吕光斌
山东工业技术 2016年24期
董蕴慧+毕征程+张程+吕光斌
摘 要:根据制造一个自主控制的机器人在一间平面结构房子模型里运动并找到一根蜡烛尽快将它熄灭的任务,利用开关二极管、滤波电容、电阻、光电耦合、L298N、LM2596等元器件,设计出稳压降压电路和L298N驱动模块的PCB板,并通过STC12C5A60S2单片机导入自己设计的一系列如寻墙、寻火、灭火、回家等子程序,合理布局地面灰度传感器、红外光电传感器并在不断改进和调试下成功制作出能够准确完成任务的灭火机器人。
关键词:机器人;灭火;传感器;电机驱动;稳压电路
DOI:10.16640/j.cnki.37-1222/t.2016.24.134
1 系统的整体方案设计
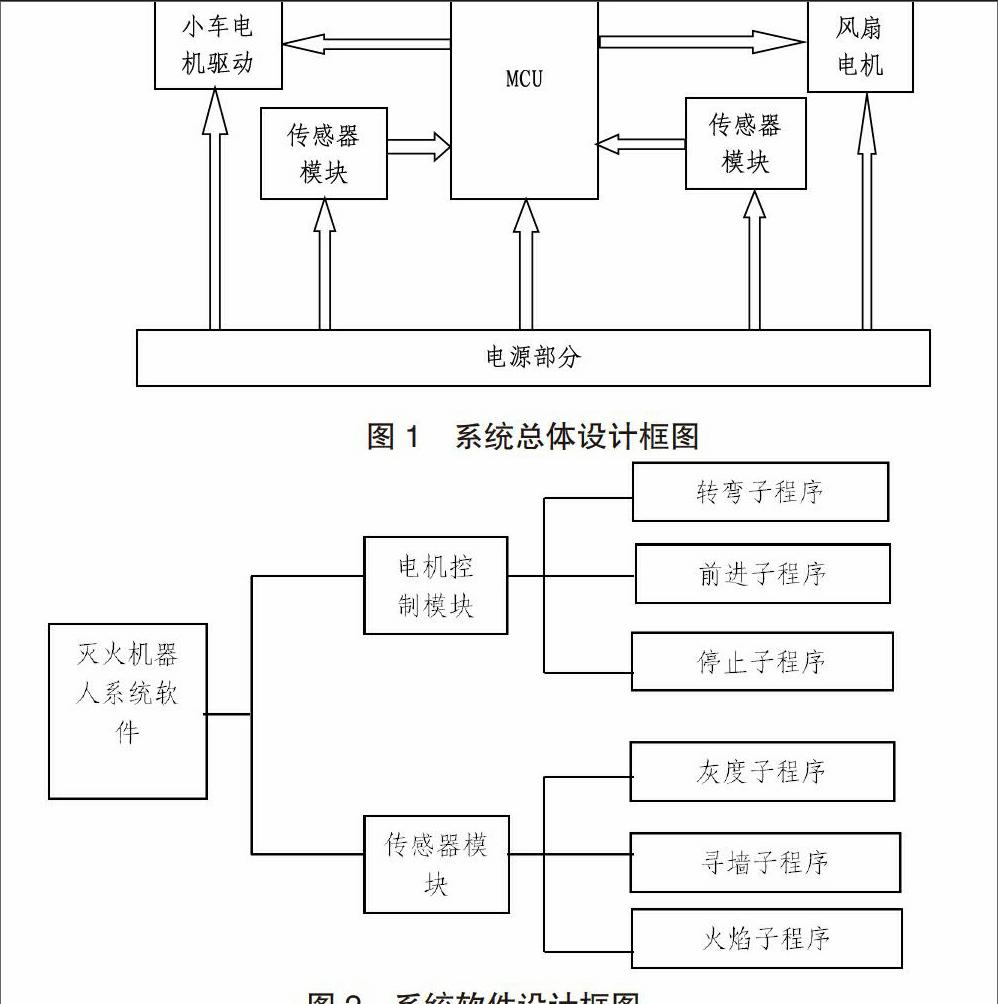
整体选定右手法则,即小车基本一直沿右墙走,当进入房间后,如果没有火,则寻找下一个房间;如果有火,则开始执行寻火程序,直到离蜡烛30cm的检测到白线,再利用风扇将蜡烛熄灭,完成灭火功能。因此设计的小车要求能够及时调节前进的方向,以便快速进入房间,顺利找到火源。系统总体设计框图如图1:
2 硬件设计
该方案是设计一个在规定区域能自主搜索火源并实施灭火的智能机器人小车,设计使用的主控芯片为STC12C5A60S2单片机,设计重点在传感器和电机驱动上
2.1 DC-DC 降压电路
采用LM2596s-5.0芯片。输入端给入11.1V~12.8V电压,输出端输出5V电压。LM2596开关电压调节器是降压型电源管理单片集成电路,能够输出3A的驱动电流,同时具有很好的线性和负载调节特性。本方案采用LM2596s-5.0,输入端给入11.1V~12.8V电压,输出端输出5V电压。该器件内部集成频率补偿和固定频率发生器,开关频率为150KHz,与低频开关调节器相比较,可以使用更小规格的滤波元件。由于该器件只需4个外接元件,可以使用通用的标准电感,这更优化了LM2596的使用,极大地简化了开关电源电路的设计。
2.2 避障传感器及其辅助电路
本方案采用红外测距传感器来实现过程中的寻墙功能。红外传感器是一种集发射与接收于一体的光电传感器。具有受可见光干扰小、价格便宜、易于配装、使用方便的特点。检测距离可以根据要求适度调节。
两种红外传感器均在传感器接收不到反射光时,输出高电平;当传感器接收到反射光时,输出低电平。通过前面五个、左边两个、右边一个共八个传感器的信号,实现左右手法走迷宫、倒车、旋转等功能。
2.3 火焰传感器及其辅助电路
该方案为实现探测火源的功能,采用6路火焰传感器来探测房间内的是否有火源。能够探测火焰发出的波段范围分别为700—1100 nm的短波近红外线(SW-NIR),通过电信号(电压信号)进行输出。当传感器接收到火焰信息时,输出电压为 0.5~2.5V。通过给单片机的比较口的输入信号电压,即可实现测火。传感器探测距离可达 2m,但受日光影响较大。通过信号灯的导通状态,可观察是否检测到信号。
2.4 灰度传感器及其辅助电路
灰度传感器的主要作用是探测房间门口处,终点处以及火焰圈处的白线。该方案采用的型号为:CK019循迹传感器。检测距离为1~3cm。白线输出高电平,黑线输出低电平。
3 软件设计
软件设计方案是以上述硬件电路为基础的,包括电机控制模块、传感器模块的程序设计与实现。程序设计采用C语言编写,编程环境是集成Keil C51编译器的集成编译环境。灭火机器人设计的软件设计结构框图如图2所示。
4 总结
本次的灭火机器人小车设计主要涉及驱动模块、避障模块、灰度模块、灭火模块、单片机开发、程序设计等等。我们采用额定电压为12V,转速为333rad/s的电机,11.1V,25C的电池,并在小车左右分别加了一个传感器作为反馈调节消除误差,设计出运行稳定的智能灭火机器人。
参考文献:
[1]张俊谟.单片机中级教程[M].北京:北京航空航天大学出版社,2006.
[2]泰继荣.现代直流控制技术及其系统设计[M].北京:机械工业出版社.
[3]沙占友.单片机外围电路设计[M].北京:电子工业出版社,2003.
[4]阎石,数字电子技术基础.北京:高等教育出版社,1998.
作者简介:董蕴慧(1996-),女,山东烟台人,本科。
猜你喜欢
中国电子报(2019年54期)2019-10-24
时代英语·高一(2019年1期)2019-03-13
中学物理·初中(2017年8期)2018-03-06
新高考·高一物理(2015年5期)2015-08-18
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
少儿科学周刊·少年版(2015年4期)2015-07-07
