
无人地面车辆乡村典型工作环境复杂度评价*
2017-01-12 10:20唐振民谭业发石朝侠刘家银
网络安全与数据管理 2016年5期
李 静, 唐振民, 谭业发, 石朝侠, 刘家银
(1.解放军理工大学 野战工程学院,江苏 南京 210007;2.南京理工大学 计算机科学与工程学院,江苏 南京 210094)
无人地面车辆乡村典型工作环境复杂度评价*
李 静1, 唐振民2, 谭业发1, 石朝侠2, 刘家银2
(1.解放军理工大学 野战工程学院,江苏 南京 210007;
2.南京理工大学 计算机科学与工程学院,江苏 南京 210094)
环境复杂度是无人地面车辆自主性评价三因素(即任务复杂度、环境复杂度、人机交互程度)的一个重要方面。在对美国陆军新版《作战纲要》中作战环境分析的基础上,定义无人地面车辆乡村典型工作环境,以该环境复杂度作为评价目标,分为道路环境、车道内障碍、路面覆盖、路面破损、光照与阴影、成像模糊六个评价方面,建立乡村典型工作环境复杂度评价指标体系。通过算法进行道路边界分割,实现定量评价,并给出典型场景中环境复杂度的参考值。
无人地面车辆;工作环境;环境复杂度评价;道路边界分割
0 引言
环境复杂度是无人地面车辆自主性评价三因素[1](即任务复杂度、环境复杂度、人机交互程度)的一个重要方面。美国陆军新版《作战纲要》定义的作战环境由地理、地形、气象与基础设施四大要素组成。本文在此基础上,定义无人地面车辆乡村典型工作环境为没有道路标识的乡村公路、路况较差的乡间道路,或无铺装的土路,以中国农村特有的场景为背景组成的环境;建立无人地面车辆乡村典型工作环境复杂度评价指标体系;通过算法进行道路边界分割、路面障碍物识别和可通行区域划分,完成对该环境复杂度的定量评价,给出典型场景中环境复杂度的参考值。旨在提高无人地面车辆在乡村典型工作环境下自主性评价的准确性和科学性。
1 环境复杂度研究现状
对无人地面车辆环境复杂度的研究涉及到地形学、气象学、道路工程学、车辆工程学、战场环境建模、信息工程学、电磁学等诸多学科[2-3]。目前,一般采用结构化和非结构化来区分道路环境[4],这种方法描述不够精确,包含的因素不够全面,分析时也主要集中在一些特征明显的场景或是用来验证算法的特定环境,与真实的自然环境差别较大。而且,在结构化或非结构化道路环境中也同样存在复杂程度的差别,无人地面车辆在不同复杂程度的环境中,其自主性评价值是不具可比性的。因此,如何科学地对环境复杂度进行定量评价,给出典型场景中环境复杂度的参考值,是无人地面车辆自主性评价的基础,对扩大其工作范围具有重要的现实意义。
2 乡村典型工作环境复杂度评价指标分解
乡村环境的复杂度较高,道路一般是非标准的,地表粗糙而又凹凸不平,有的甚至是自然形成的小道,没有清晰的车道线和道路边界,易受光照、阴影、天气变化等环境因素的干扰,且没有交通信号标识,人车混行,路内障碍多。因此,本文结合无人地面车辆执行任务的特点和性质,提取大量乡村环境图例的组成因素,以无人地面车辆乡村典型工作环境复杂度作为评价目标,按层次分析法理论要求,将环境复杂度分为道路环境、车道内障碍、路面覆盖、路面破损、光照与阴影、成像模糊六个评价方面,建立乡村典型工作环境复杂度评价指标体系。
2.1 道路环境
无人地面车辆在有路环境中分割出道路边界,在无路环境中分出可通行区域是其感知的最终目标[5]。将影响道路边界分割的道路环境因素分为车道线、路面类型、路侧环境和道路线形四个指标因素,如图1。
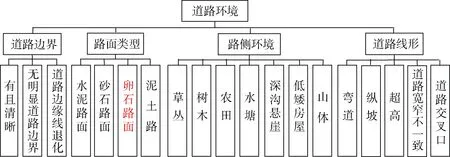
图1 道路环境指标的分解
2.2 车道内障碍
由于基于视觉的道路导航系统主要是由道路检测和障碍物检测两部分组成[6],因此把车道内障碍单列成一个评价方面,分为静态和动态障碍两个指标因素,如图2。
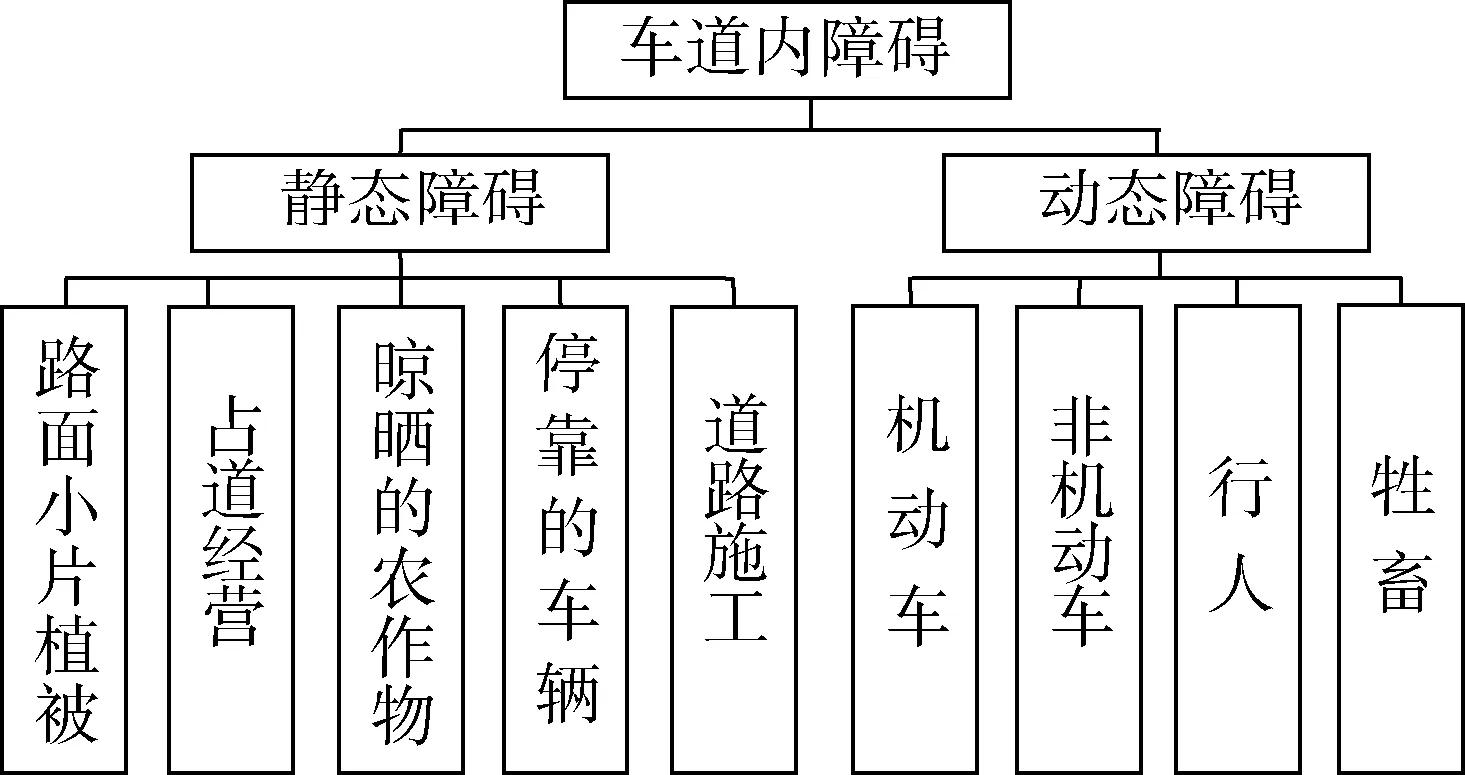
图2 车道内障碍指标的分解
2.3 路面覆盖
被覆盖的路面常常与路侧环境融为一体,造成道路边界模糊,一般分为落叶、积雪、雨后积水、运输过程中遗撒物四个指标因素,如图3。
2.4 路面破损
乡村道路在建设时由于受经费、地形等诸多因素的限制,道路建设标准低、路面材质差、道路养护不及时等造成后期使用中出现路面破损严重,将不同的破损类型[7-8]作为指标因素,如图4。

图3 路面覆盖指标的分解

图4 路面破损指标的分解
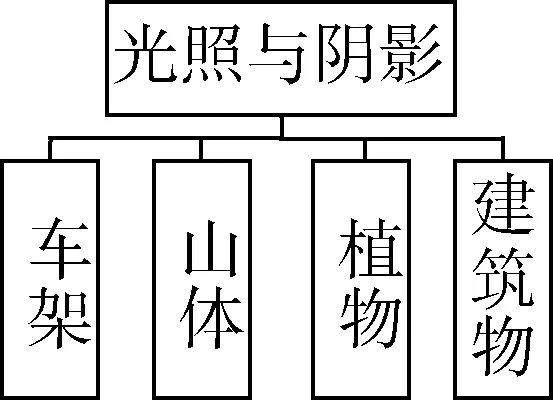
图5 光照与阴影指标的分解
2.5 光照与阴影
在城市环境中造成阴影的因素较多,在乡村环境中相对比较单一。将车架、山体、建筑物、植物(高大茂盛的树木、高草、密灌丛)造成的阴影作为指标因素,如图5。
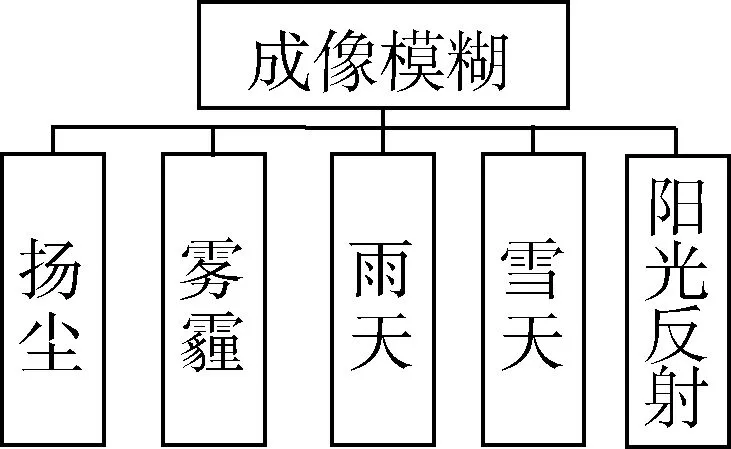
图6 光照与阴影指标的分解
2.6 成像模糊
无人地面车辆是基于机器视觉的环境感知,将扬尘、雾霾、雨天、雪天和阳光反射作为成像模糊的指标因素,如图6。
3 乡村典型工作环境复杂度评价
道路边界分割是利用图像处理或模式识别技术将图像中的路和非路区分出来,是体现无人地面车辆自主性能的基础[9]。
3.1 评价方法
无人地面车辆工作环境复杂度是一个模
糊概念,其组成因素事先难以确定,随机性大,由这些因素组成的环境复杂程度更是难以用常规的分类方法或模型进行度量。因此,本文选取大量具有代表性的乡村真实场景图例(352×288 dpi),按六个评价方面分类,以此作为不同指标因素的验证环境图,经算法验证,给出最终的评价结论。
本文采用基于最大类间方差和纹理区别的算法[10]对图像进行道路边界分割。首先,采用最大类间方差阈值分割法对图像进行初步分割(利用图像的灰度值,通过计算目标与背景两大类间的最大方差而动态得到图像分割的阈值,然后据此进行图像分割);初步分割后的二值图像有多个连通区域(忽略面积较小的噪声区域),为了进一步确定道路区域,采用道路纹理作为主要特征进行匹配,分别计算各连通域的纹理特征与实际道路纹理特征的方差,取具有方差最小值的区域作为所求的道路区域。对于模糊图像先采用基于暗通道的算法去雾[11]处理后,再进行以上步骤,具体流程如图7。

图7 算法实现流程图
其次,以人工分割的道路边界为评价标准,将其与算法分割的道路边界转化至同一坐标系下,连成一条由多条线段连接成的线段集,求解两条线段集的平均距离,得到的左右边界平均距离取平均值作为环境复杂度的评价值,评价值越大说明分割效果越差,即该环境复杂程度越高。
3.2 实验验证
采用上述方法进行无人地面车辆乡村典型工作环境复杂度评价,需要大量图例进行验证,受篇幅限制本文仅列出6个评价方面的各一个图例,如图8~13。由于道路边界分割是在原图基础上进行的,原图不再单列。每组图中(a)为人工分割结果,(b)为算法分割结果,(c)为两类分割结果的平均距离计算结果。如果图中有双侧道路边界,但分割结果只有单边,表明另一边分割效果不好,不可靠,算法已将其自动过滤。

图8 道路环境

图9 车道内障碍

图10 路面覆盖

图11 路面破损
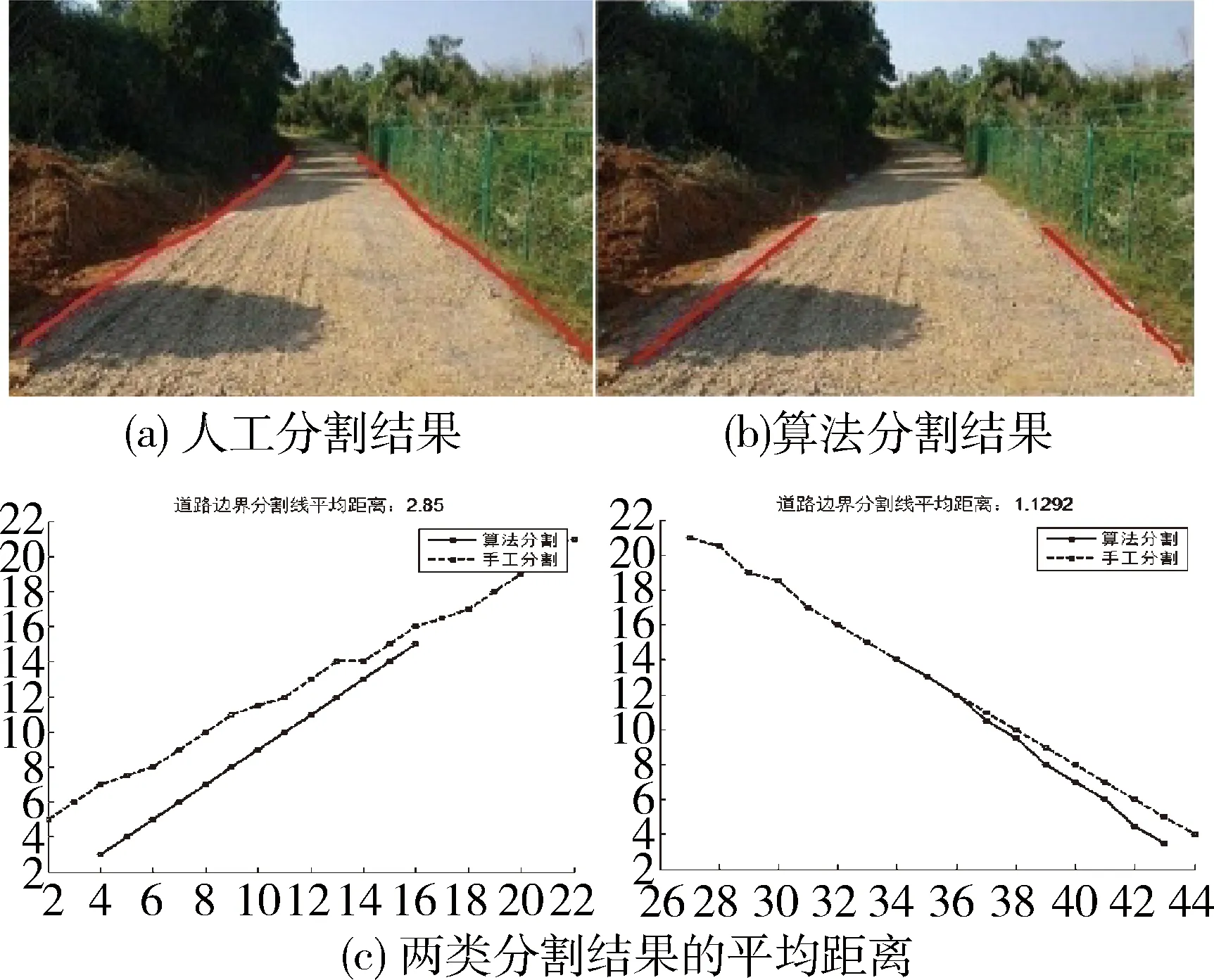
图12 阴影和光照
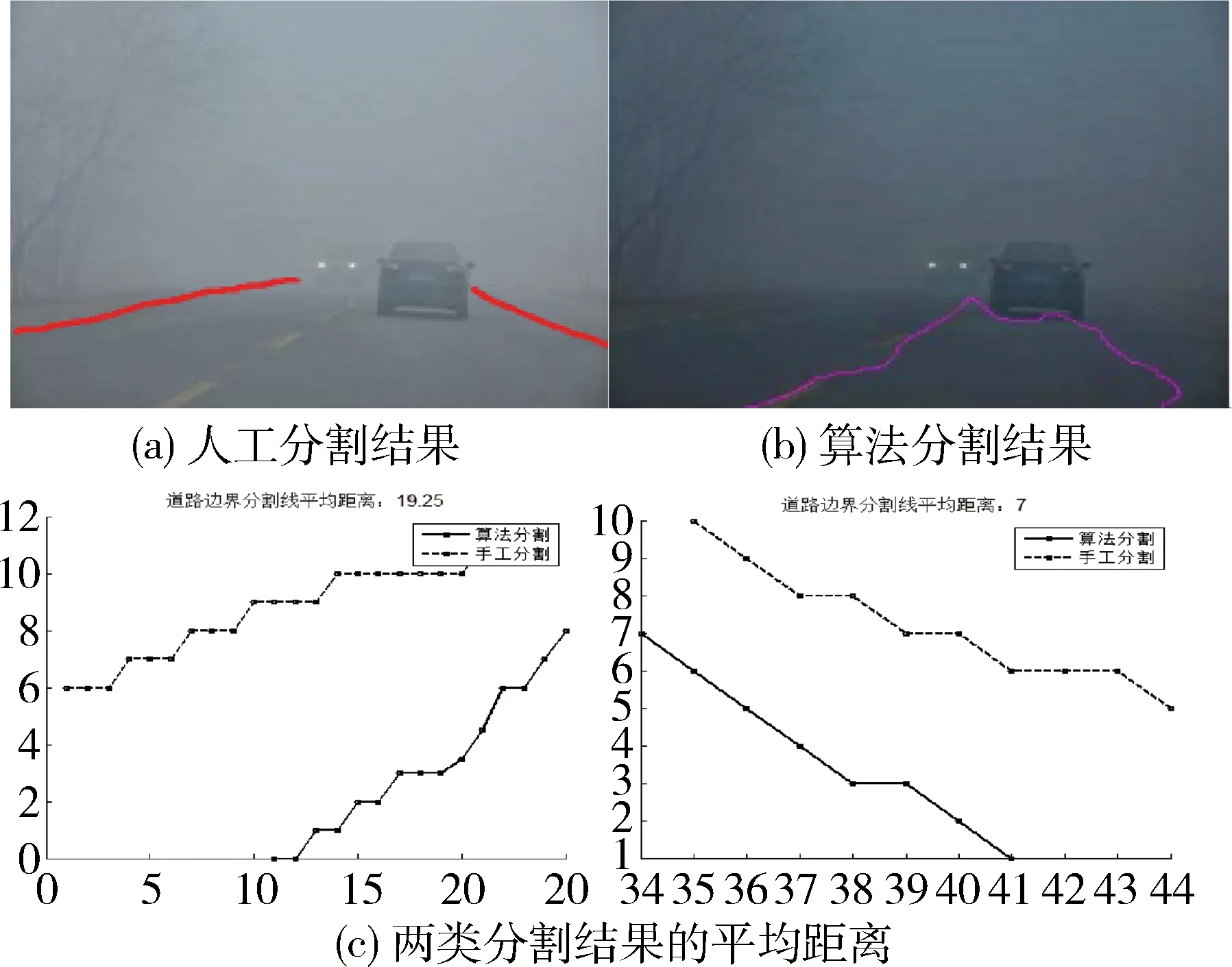
图13 图像模糊
整理以上6组图中数值得到乡村典型工作环境复杂度评价值,如表1。

表1 乡村典型工作环境评价值
4 评价结果分析
通过建立无人地面车辆乡村典型工作环境复杂度评价模型,经算法程序实现,用图例验证不同环境的可识别难度,得到评价值。对大量评价结果分析、归类,将环境分为简单(评价值<2)、一般(评价值2~5)、较复杂(评价值5~10)、复杂(包括无法识别的情况,评价值>10)四个等级,并在具体场地实验结论的基础上,给出影响无人地面车辆乡村典型工作环境复杂度的指标因素,如表2。
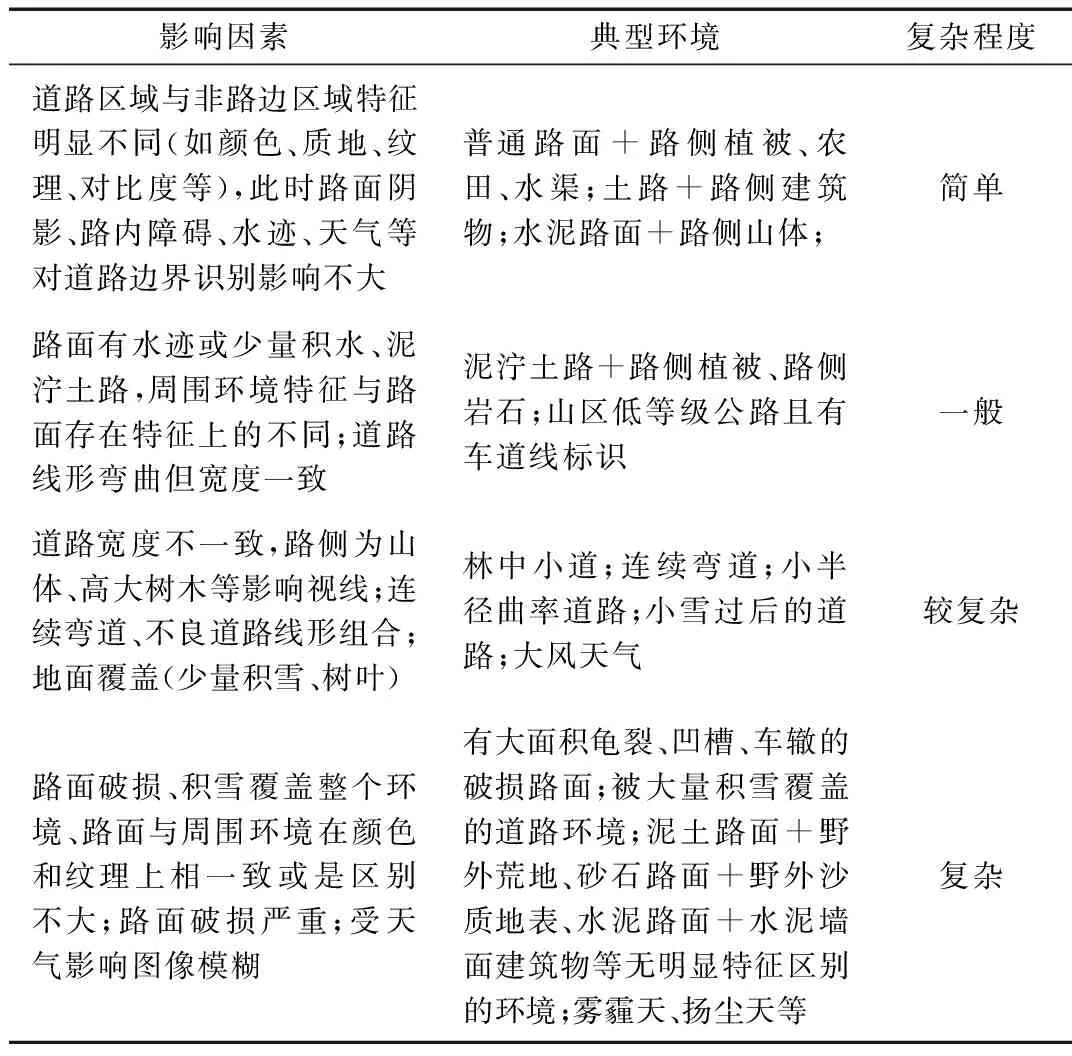
表2 无人地面车辆乡村典型工作环境复杂度评价分析
表2中列出的乡村典型环境复杂度因素还不全面,今后将通过建立环境数据库对结论进行不断的完善和补充。
5 结论
在实际的无人地面车辆乡村典型工作环境中,环境基
本上是由多个单因素叠加组成的,而多个因素对乡村典型环境道路边界分割的影响却不是单因素的简单相加,必须采用科学的方法来判断环境的复杂程度。因此,对环境复杂度评价的研究是一项长期而有意义的工作,为无人地面车辆自主性评价提供一定的基础。
[1] HUANG H M, PAVKE K, NOVAK B, et al. A framework for autonomy levels for unmanned systems (ALFUS)[C]. Proceedings of the AUVSI’s Unmanned System, North America, 2005.
[2] 董志明,郭齐胜,黄玺瑛.战场环境建模与仿真[M].北京:国防工业出版社,2013.
[3] 郑有飞.环境科学概论[M].北京:气象出版社,2011.
[4] 胡旭,刘满禄,张华,等.基于特征模型的非结构化道路跟踪算法研究[J].微型机与应用,2012,31(17):46-50.
[5] 宋怀波,何东健,辛湘俊.基于机器视觉的非结构化道路检测与障碍物识别方法[J].农业工程学报,2011,27(6):225-229.
[6] 刘华军.面向智能车辆的道路环境理解技术研究[D].南京:南京理工大学,2006.
[7] 潘威,李旭丹.公路技术状况检测与评价技术[M].北京:人民交通出版社,2014.
[8] 刘章棋,张亚岐,席晓哲,等. 基于PDE和小波分析的破损路面检测技术[J].微型机与应用,2012,31(8):35-37.
[9] 郝志帅.复杂环境的道路检测技术研究[D].南京:南京理工大学,2009.
[10] 夏良正.数字图像处理[M].南京:东南大学出版社,1999.
[11] He Kaiming, Sun Jian, Tang Xiaoou. Single image haze removal using dark channel prior[C].IEEE Transactions on Pattern Analysis and Machine Intelligence, 2009,33(12):1956-1963.
Evaluation of typical rural environment complexity of the unmanned ground vehicles
Li Jing1, Tang Zhenmin2, Tan Yefa1, Shi Zhaoxia2, Liu Jiayin2
(1.College of Field Engineering, PLA University of Science & Technology, Nanjing 210007, China;2. Department of Computer Science and Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
Environment complexity is an important aspect of the autonomy evaluation of the unmanned ground vehicles (UGVs), which has three factors, i.e. task complexity, environmental complexity and the degree of human-computer interaction. On the basis of the operational environment analysis of the new battle outline of the U.S. army, the typical rural environment of the unmanned ground vehicles was defined. The environment complexity was divided into six aspects, i.e. the inside lane road, obstacles, pavement, road surface damage, light and shadow and fuzzy imaging evaluation. Evaluation index system of the typical rural environment complexity was established. By dividing the road boundary through the algorithm, a quantitative evaluation method was implemented. Moreover, the reference values of the environments complexity in several typical situations were given.
unmanned ground vehicle; working environment; evaluation of environmental complexity; road boundary integral
国家自然科学基金(61305134;61371040)
TP242.6
A
1674-7720(2016)05-0061-04
李静,唐振民,谭业发,等. 无人地面车辆乡村典型工作环境复杂度评价[J].微型机与应用,2016,35(5):61-64.
2015-11-03)
李静(1978-),通信作者,女,博士研究生,工程师,主要研究方向:无人地面车辆自主性评价、无人地面车辆工作环境复杂度分析、多智能体协同、机械车辆技术综合保障。E-mail:lijingwry@126.com。
唐振民(1961-),男,博士生导师,教授,主要研究方向:智能机器人环境理解、多传感器数据融合、模式识别与人工智能。
谭业发(1963-),男,博士生导师,教授,主要研究方向:机械车辆技术综合保障。
猜你喜欢
小学生作文(低年级适用)(2022年10期)2022-10-31
中学生数理化·七年级数学人教版(2022年11期)2022-02-14
现代临床医学(2021年1期)2021-01-26
小哥白尼(军事科学)(2019年2期)2019-04-17
中国惯性技术学报(2019年6期)2019-03-04
小哥白尼·趣味科学画报(2019年12期)2019-02-28
中央民族大学学报(自然科学版)(2017年2期)2017-06-11
岷峨诗稿(2017年4期)2017-04-20
新高考(英语进阶)(2017年12期)2017-02-26
火控雷达技术(2016年3期)2016-02-06
