
双馈风力发电机空载并网运行控制建模与仿真研究
2017-01-10 01:37兰飞姚知洋黎静华陶丽
电力建设 2016年9期
兰飞,姚知洋,黎静华,陶丽
(广西电力系统最优化与节能技术重点实验室(广西大学),南宁市 530004)
双馈风力发电机空载并网运行控制建模与仿真研究
兰飞,姚知洋,黎静华,陶丽
(广西电力系统最优化与节能技术重点实验室(广西大学),南宁市 530004)
针对双馈风力发电机(doubly-fed induction generator,DFIG)空载运行和并网运行特点,采用一种“空载—并网”两阶段控制的方案,从而实现“空载”和“并网”2个工作状态的平滑转移。基于Matlab/Simulink平台,分别搭建了双馈风力发电机空载运行和并网运行的模型,给出了基于定子磁场定向矢量控制技术的空载和并网运行控制的详细仿真模型和具体参数,为研究双馈风力发电机并网控制技术提供重要的基础信息和平台。提出了一套较为完整的双馈风力发电机空载并网的仿真实验方案,通过该实验方案,可得到较为全面反映控制策略性能的实验结果,依据此可对并网控制策略的性能进行检验。最后,通过空载运行、并网瞬间的过渡过程以及并网后的最大功率追踪(maximum power point tracking,MPPT)等仿真结果验证了本文所提控制方案以及建立的仿真模型的有效性。
双馈风力发电机(DFIG);空载并网;定子磁链定向;最大功率追踪(MPPT);建模仿真
0 引 言
随着风电技术的迅速发展,双馈风力发电机(double-fed induction generator,DFIG)的发电技术在风力发电系统中已经得到广泛的应用[1-2]。随着机组容量的不断增大,如何在变速下实现风力发电机安全、无冲击地并网是该发电技术应用中的一个重要研究课题[3]。DFIG空载并网方式一般分为空载并网、负载并网[4]以及孤岛并网3种方式[5]。其中,空载并网简单易行,是当前应用最为广泛的并网技术[2-13]。
DFIG空载并网控制主要是基于定子磁链定向[2-10]及电网电压定向[11-13]的矢量控制技术。文献[2-10]中,基于定子磁链定向技术,采用PI控制器对转子侧变流器输出的励磁电流进行控制。文献[11-13]中,基于电网电压定向技术,采用PI控制器对转子侧变流器输出的励磁电流进行控制。总体而言,定子磁链定向技术与电网电压定向技术所定向的旋转坐标轴相差π/2矢量角,两者控制效果相当[14]。除了上述2种控制策略之外,近年来出现了一些改进的控制策略。文献[9]通过引入自适应谐振调节器,与原有的PI控制器一起实现并行控制,从而削弱PI控制的固有特性对控制效果的影响。文献[14]引入了虚功率的概念,并网前后电机模型和控制策略一致,从而避免了分阶段切换控制的模型切换问题。但是,采用直接功率控制算法时,开关频率不固定,该算法对处理器速度及A/D转换器等硬件的要求较高[15],从而限制了其在实际工程中的广泛使用。文献[16]提出了一种计及定子电阻压降影响的新型磁链观测器,使磁链角度测量更为精确。综上,双馈风力发电机的空载并网控制技术已得到了较为广泛的研究,并取得了不少研究成果。然而,当前的研究主要侧重于数学模型的理论推导,未对仿真模型的搭建过程进行详尽的介绍,模型和方法如何实现这一问题在现有文献报道中并不明确,而这恰恰是广大风电技术研究人员所期望的。
本文在充分总结和分析近年来双馈风力发电机空载并网控制的文献的基础上,开展基于定子磁链定向控制策略的DFIG空载并网仿真研究。针对空载运行和并网运行工况下DFIG模型及其控制策略的不同,提出“空载—并网”两阶段控制方案,基于Matlab/Simulink分别搭建空载运行子系统和并网运行子系统,并通过状态转移的方式将2个子系统组合起来形成空载并网控制仿真模型。最后通过对并网前后及过渡过程的连续仿真,验证该并网控制方案和所搭建模型的有效性。基于本文的研究成果,研究人员可以快速地搭建基础仿真平台,从而为双馈风力发电的空载并网乃至并网后的控制技术进行更深入研究提供基础研究平台。
1 DFIG运行控制原理、方案及策略
1.1 DFIG空载并网控制原理
DFIG并网控制是通过调节背靠背变流器输出,改变转子绕组的交流励磁电源,从而使发电机的输出电压跟踪电网电压的变化,进而实现无冲击的柔性并网。
1.2 DFIG空载并网控制方案
并网前后,DFIG的数学模型不同,相应地,其控制策略也不相同[2]。因此,本文采用图1所示的“空载—并网”两阶段空载并网控制方案。图1中:u1abc为电网三相电压;us为定子电压;is和ir分别为定子电流和转子电流;ωr为转子角频率。图1将系统分为空载运行子系统和发电运行子系统。在空载运行阶段,空载运行子系统负责空载变速恒频运行和并网操作控制。在并网运行阶段,发电运行子系统负责有功无功功率的解耦控制,公共部分的转子侧变流器是系统的执行部件。通过控制图1中开关S的开关状态即可实现2个子系统的切换,同时向上合为空载运行子系统,同时向下合为发电运行子系统。

图1 “空载-并网”两阶段并网控制方案图Fig.1 Control scheme of two-stage of ‘no load- grid connected’
1.3 DFIG空载与并网控制策略
基于图1的控制方案设计的空载与并网控制策略如图2所示。从功能上可将图2分成2个部分,虚线框内为测量部分,负责测量发电机的各物理量,虚线框外为控制部分,由d轴和q轴2条控制支路组成。2条控制支路中设置S1、S2、S3、S44个开关,其作用是实现空载运行及并网运行2种控制策略的切换。同时向上闭合时,系统在空载运行控制策略的控制下运行;同时向下闭合时,系统在发电运行控制策略的控制下运行。对开关S1、S2、S3、S4进行上下切换操作即可完成控制策略的转换。

图2 空载运行及并网发电运行控制策略Fig.2 Control strategy of no-load and grid-connected operation
图2中:u1a为电网a相电压;usa为定子a相电压;ur为转子电压;uds和uqs分别为d轴和q轴的定子电压;ids和iqs分别为d轴和q轴的定子电流;udr和uqr分别为d轴和q轴的转子电压;idr和iqr分别为d轴和q轴的转子电流;u*dr和u*qr分别为d轴和q轴的励磁控制信号,经过坐标变换得到转子电压在两相旋转坐标轴系αr、βr轴上的参考分量u*αr和u*βr;ψds和ψqs分别为d轴和q轴的定子磁链;ψdr和ψqr分别为d轴和q轴的转子磁链;Ls、Lm、Lr分别为定子电感、励磁电感、转子电感;Rr、Rs分别为转子电阻和定子电阻;ω1、ωr、ωs分别为电网角频率、转子角频率和定子角频率;Ps、Qs分别为定子的有功功率和无功功率;Pr为转子的有功功率;Pref、Qref分别为发电机有功功率和无功功率的给定信号;θs、θu和θr分别为定子磁链矢量角、电网电压矢量角和转子磁链矢量角。
1.3.1 空载运行控制策略

us=ω1ψs
(1)
ψdr=Lmidr
(2)
udr=Rridr+Lrdidr/dt
(3)
uqr=ωsLridr
(4)
1.3.2 发电运行控制策略

(5)
(6)
式中
(7)
(8)
图2中有功功率外环的功率给定信号Pref由(maximum power point tracking,MPPT)模块[17-18]根据最大功率追踪算法计算给出,也可根据需要直接给定。无功功率外环的给定值一般设置为0,也可根据电网运行需要给定。
1.3.3 改进型磁链观测器
常规磁链观测器认为定子磁链矢量角θs=θu+π/2,与改进型磁链观测器相比,从结构上省掉了“角度计算”模块,因而其观测到的磁链矢量角存在一定的误差。为了更精确地追踪电网电压的信息,本文依据文献[16]给出的式(9)—(11)设计了图2所示的改进型磁链观测器。其原理是利用“角度计算”模块对θs进行修正,设计依据为式(9)—(11)。
(9)
(10)
θs=θu+θ′
(11)
2 DFIG空载并网仿真模型搭建
依据上述DFIG空载并网方案及控制策略,基于Matlab/Simulink搭建图3所示的空载并网总体仿真模型[10]。Mes为并网信号,VW为风速。其工作原理如下文所述。

图3 总体仿真图Fig.3 Overall simulation diagram
空载时,Mes信号为高电平,空载子系统工作,us、is、ir、有功功率P、无功功率Q、ur、ωr0等仿真结果通过切换开关S输出至示波器。当满足并网条件后,Mes端输出低电平,发电运行子系统从空载运行子系统的mux端读取状态量作为运行初值,继续执行并网后的控制任务,2个子系统完成切换操作。在波形输出显示方面,通过开关S的切换实现并网前后仿真波形的连续显示。
2.1 空载运行子系统仿真模型
图4所示的空载运行子系统仿真图由机械模块、控制器模块、2s/2r(两相静止坐标/两相旋转坐标)变换模块、空间矢量脉宽调制(space vector pulse width modulation,SVPWM)[19]、电机模块、并网条件检测模块搭建而成。主要模块的搭建过程如下文详述。
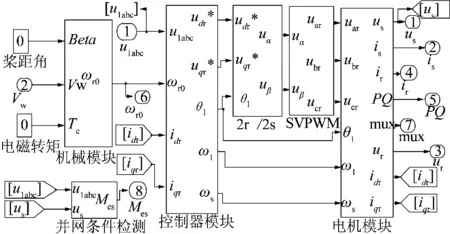
图4 空载运行子系统Fig.4 No-load operation system
2.1.1 空载运行机械模块
如图4所示,空载时,不考虑变桨距控制,机械模块只有一个变量输入(风速VW),依据式(12)所示的风力机空气动力学模型[20]可得到机械转速Ωt,其标幺值与发电机转速ωr0相等。
(12)
式中:Cp为风能利用系数;λ为叶尖速比。
2.1.2 空载运行控制器模块
控制器模块主要包括磁链观测器及d轴电流内环PI控制器2个部分,图5为模块内部建模细节,虚线框部分分别依据式(1)—(4)及式(9)—(11)搭建。
2.1.3 空载运行电机模块
依据文献[2]提供的双馈发电机数学模型,可导
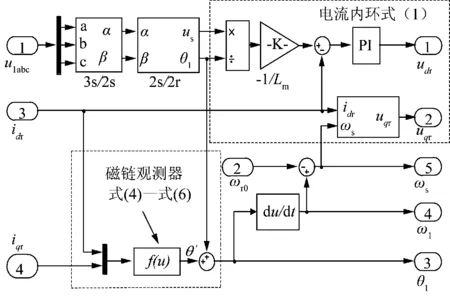
图5 空载运行控制器模块Fig.5 Controller module of no-load operation
出式(13)—(14)所示的转子电流及定制电压公式:
(13)
(14)
电机模块内部细节如图6所示,图6中2个虚线框内,分别依据式(13)和(14)搭建。

图6 空载运行电机模块Fig.6 Generator module of no-load operation system
2.2 发电运行子系统仿真模型
图7所示为发电运行子系统仿真模型。各模块的建模过程分述如下。
2.2.1 发电运行控制器模块
图8所示的控制模块是一个典型的双环控制器由电流内环与功率外环构成。各模块的工作原理在上文控制策略的介绍中已经介绍。其中磁链观测器依据式(9)—(11)设计,电流内环PI控制器依据式(5)—(8)设计。图8中,功率外环给定值由MPPT控制器给出,以捕获最大风功率。

图7 发电运行子系统仿真模型Fig.7 Simulation model of power generation system

图8 发电运行控制器模块Fig.8 Controller module of grid-connected operation
2.2.2 发电运行电机模块
图9为DFIG稳态运行时的等值电路,由此可以导出式(15)—(18)所示的标幺值模型[21-22]。
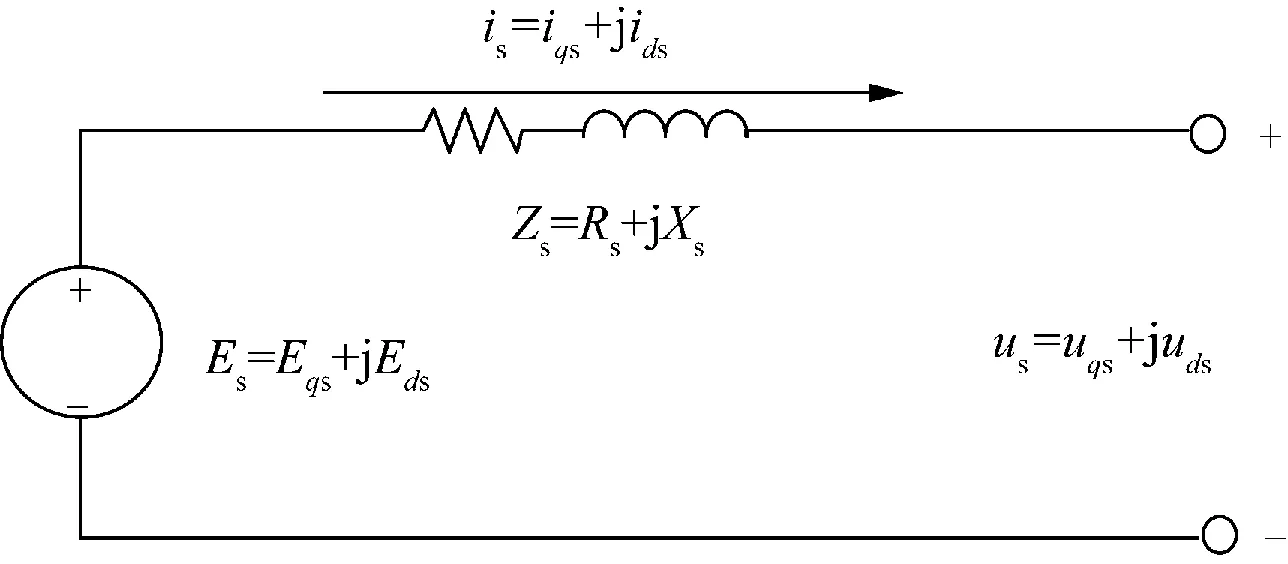
图9 DFIG并网发电运行模型Fig.9 DFIG model for grid-connected operation
(15)
(16)
(17)
(18)

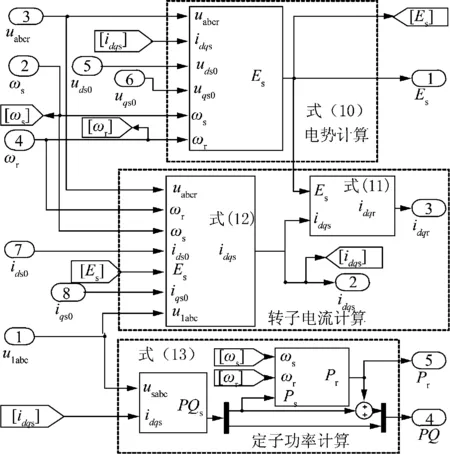
图10 并网运行电机模块Fig.10 Generator module of grid-connected operation
2.2.3 发电运行机械模块
DFIG并网后,机械模块的输入变量除了风速外增加了发电机的电磁转矩。依据式(12)所示的风力机空气动力学模型和式(19)所示的机组运动方程[2]可搭建图11所示的机械模块。
(19)
式中:J为转动惯量;Te为电磁转矩;TL为机械转矩;pn为磁极对数,pn=2。
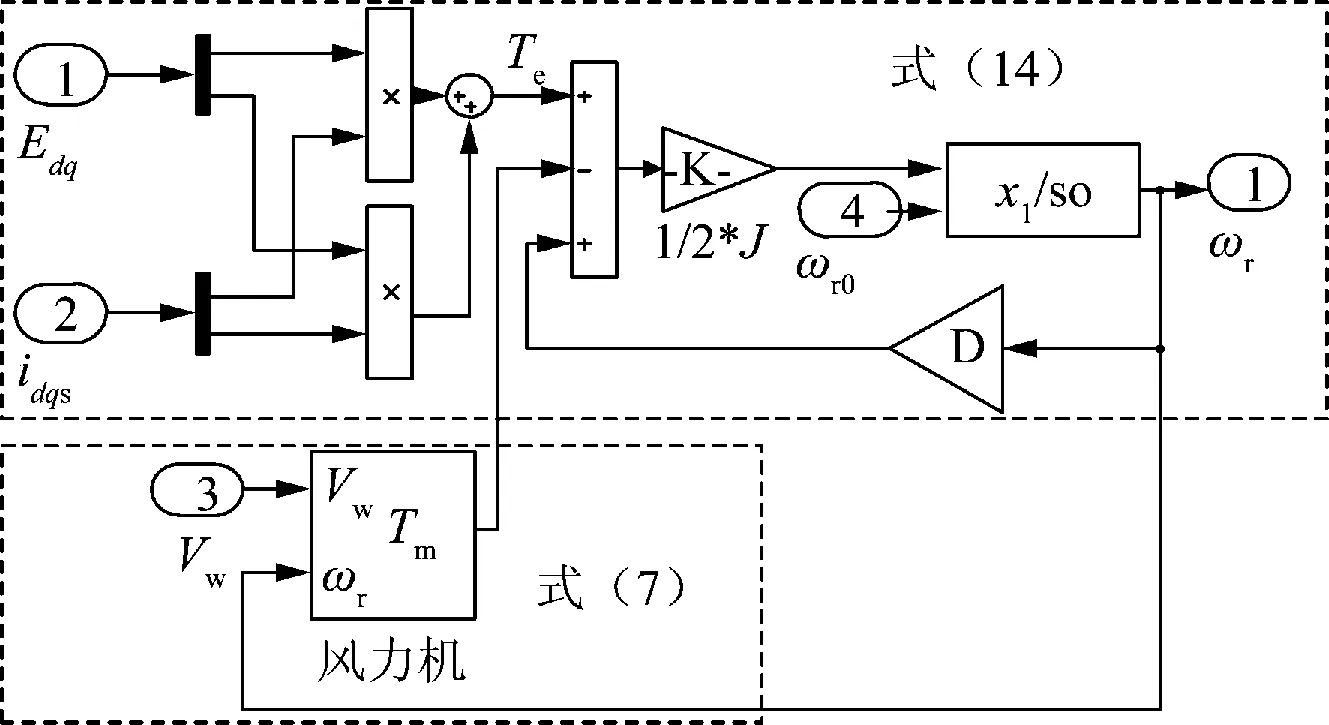
图11 机械模块Fig.11 Mechanical module
3 空载并网仿真实验研究
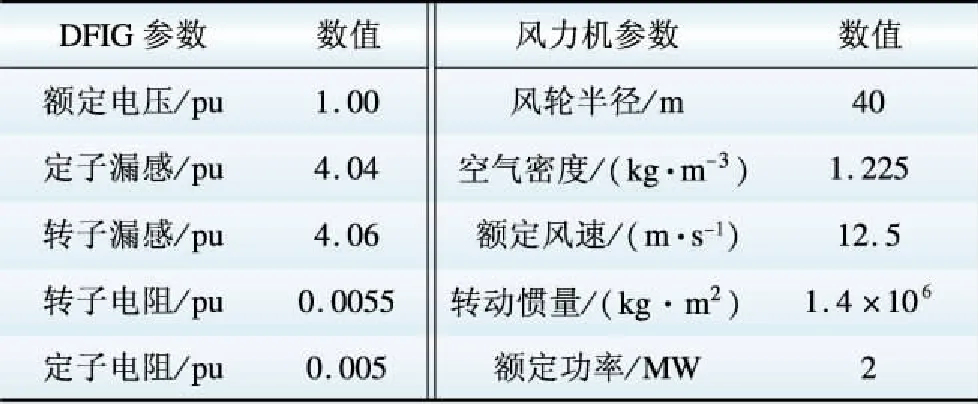
为了验证所建立的仿真模型以及控制策略的准确性,本文进行了并网前的变速恒压恒频运行,空载并网及并网后MPPT控制2个仿真实验。机组参数如表1所示,其中,风力发电机参数采用有名值,其余参数采用标幺值。
表1 仿真机组参数
Table 1 Simulation parameters of generators
3.1 空载运行仿真实验
基于图4所示的空载运行子系统仿真模型,屏蔽掉并网条件检测模块和机械模块,控制模块的转速输入改为人为给定的转子转速,然后在额定转速范围内进行变速恒频空载运行仿真实验。机组在亚同步、同步、超同步区间的仿真波形如图12所示。
由图12可得:在亚同步区间,转子电流频率随着转速的增大逐渐减小;在同步区间,转子电流为直流;在超同步区间,转子电流频率逐渐上升,且相序与亚同步区间相反。由定子电压波形可以看到,在变速情况下,定子电压幅值仍保持不变。为更准确地观测发电机定子电压追踪电网电压的精度与速度,录制了图13所示0~0.1 s时段的仿真波形。图13中:u1a为电网单相电压;usa为定子单相电压;uerr为电压偏差,用以表征定子电压追踪电网电压的状况。从图13可以看到,发电机的定子电压波形在第3个周期后基本与电网电压重合,此时电压偏差基本为0,说明在所采用的基于定子磁链定向的空载并网控制策略的控制下,发电机电压的幅值、频率、相位能以较快的速度追踪电网电压,满足并网的条件。
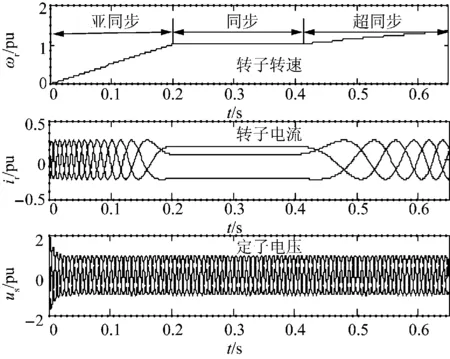
图12 不同转速下的定子电压、转子电流波形Fig.12 Waveform of rotor current and stator voltage under different rotation speeds
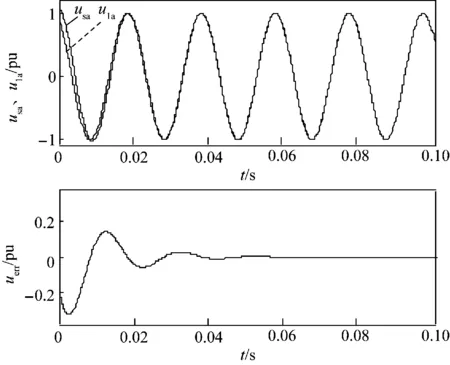
图13 定子电压usa追踪电网电压u1a波形Fig.13 Waveform of stator voltage usa tracking grid voltage u1a
3.2 空载并网及MPPT控制仿真实验
采用第2.1节所建立的空载并网仿真模型,在变风速下进行空载并网及发电运行仿真实验。为了缩短仿真时间,仿真时机组的初始转速设置为0.6 pu。按照考核目标不同把仿真过程分成4个阶段,各阶段的仿真设置如表2所示。
表2 仿真设置
Table 2 Simulation stages and the corresponding emulation settings
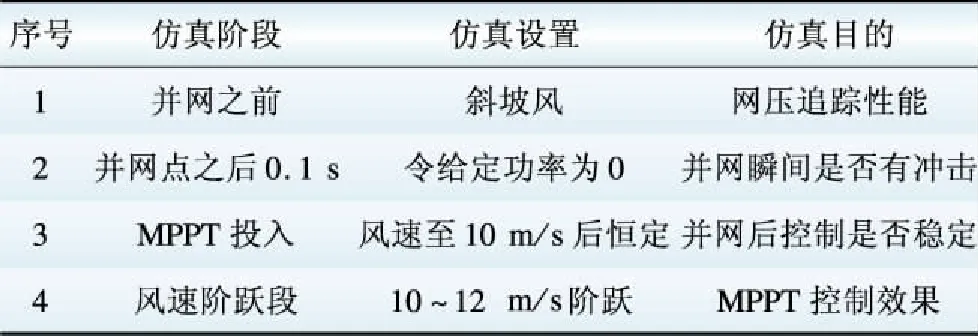
图14给出了给定风速及给定风速下发电机的转速响应及并网信号波形。并网信号Mes在0.62 s左右发生变位,表明机组在该时刻成功并网,即表2中仿真时段2的起始时刻为0.62 s,而延迟0.1 s之后的0.72 s为第3阶段的起始时刻。在风速上升段,发电机仍能实现对电网电压的追踪和并网控制,仿真阶段2,因机组输出功率为0,转速仍随风速的增大保持上升趋势,而进入第3和第4仿真阶段后,在MPPT控制作用下,在10 m/s及12 m/s的恒风速区域,均能实现对机组转速的稳定控制。
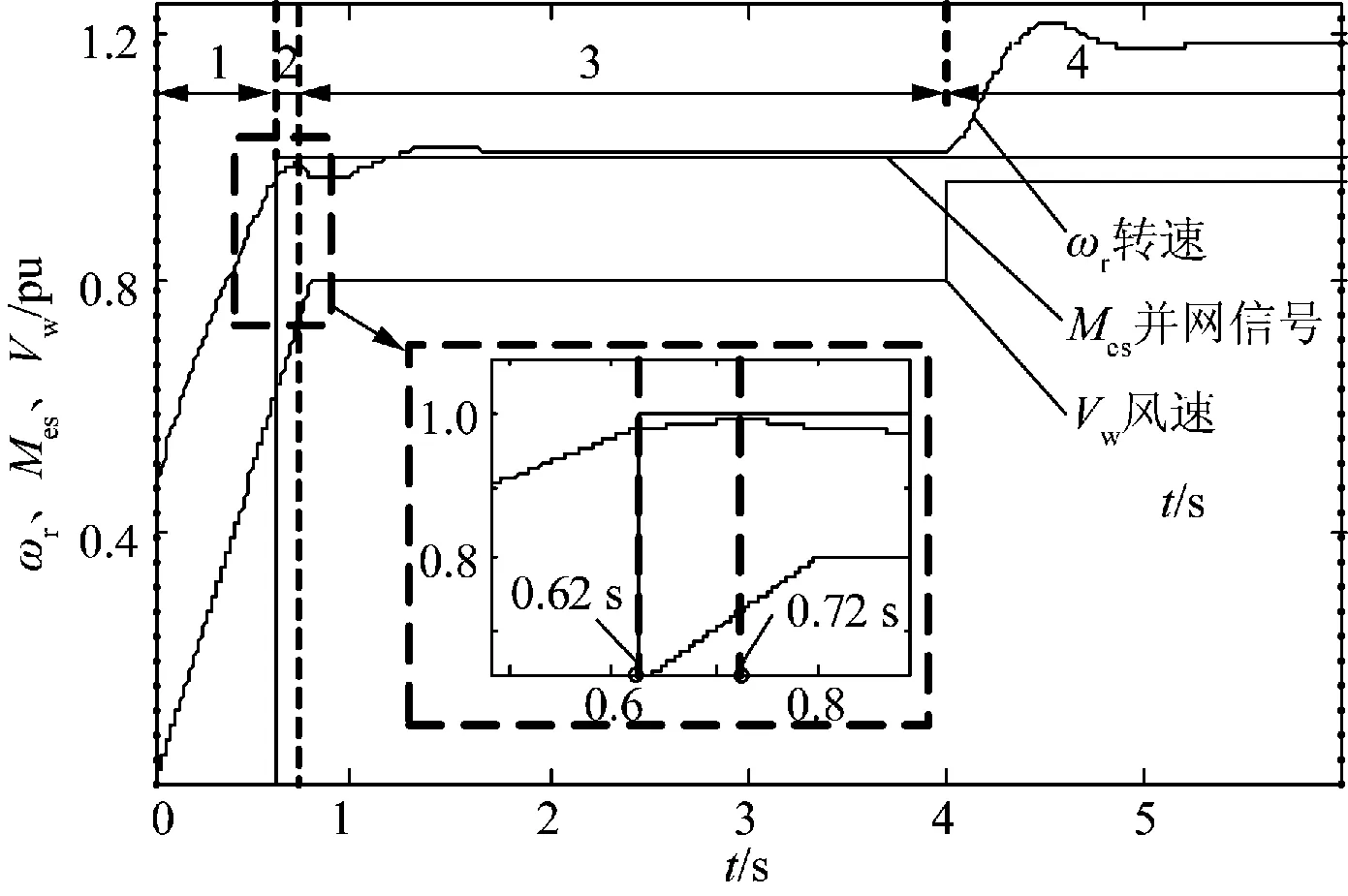
图14 给定风速下发电机转速响应及并网信号波形Fig.14 Response of rotation speed and cutting-in signal of generator under given wind speed
图15展示了发电机从空载到并网发电整个仿真全程转子电流、定子电流、有功功率和无功功率的波形。图15中划分的4个阶段与表2中4个阶段一致。为了进一步观察并网瞬间的仿真情况,对图15进行局部放大,放大结果如图16—18所示。
从图16所示的并网瞬间定子电流波形图可以看到,并网点前后定子电流仅发生了微小的扰动,较好地实现了机组的柔性并网。
从图17所示的并网瞬间转子电流波形可以看到,在并网点前后,转子电流波形平滑连续,说明空载运行子系统和发电运行子系统在并网瞬间成功地实现了2个子系统间的无缝衔接。在仿真阶段3的起点,投入MPPT控制后,转子电流增大,发电机工作在最大功率追踪控制方式,转子电流增大并逐渐趋于稳定。
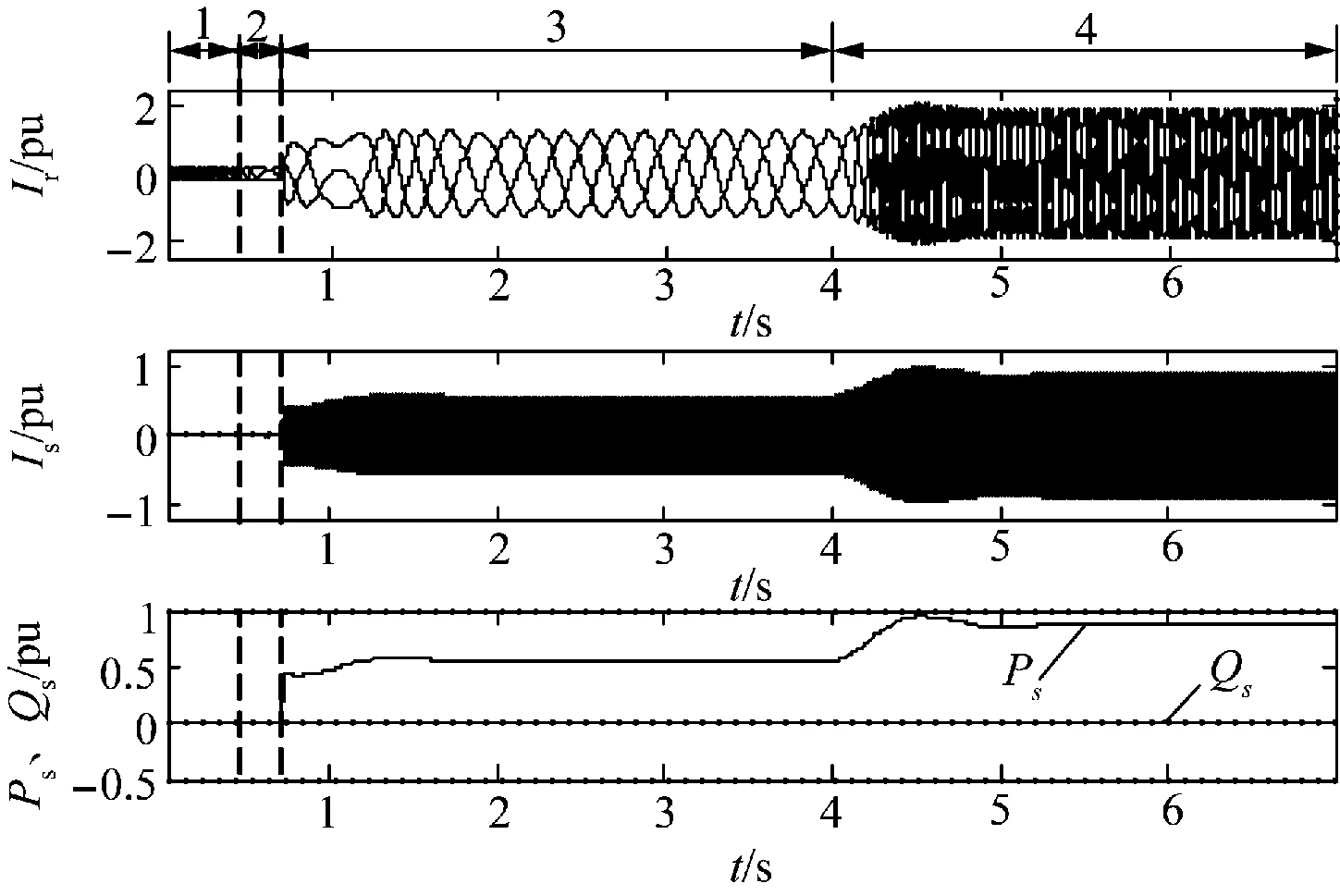
图15 仿真全程各变量波形Fig.15 Complete waveform of each parameter in simulation
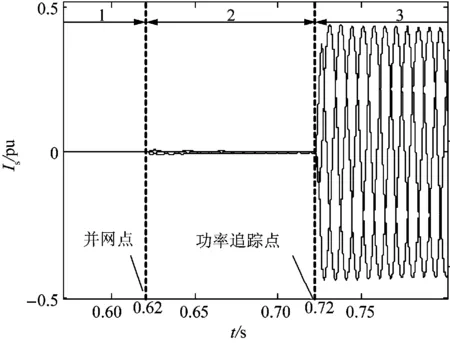
图16 并网过程定子电流波形Fig.16 Waveform of stator current at cutting-in moment

图17 并网瞬间转子电流波形Fig.17 Waveform of rotor current at cutting-in moment

图18 并网瞬间功率变化图Fig.18 Simulation waveform of power at cutting-in moment
图18为并网瞬间有功功率和无功功率的波形图,在并网点处,有功功率和无功功率仅有微小的扰动。在仿真阶段3,发电机输出的有功功率在MPPT控制下迅速上升,并趋于稳定,而输出的无功功率为0,与给定值保持一致。可见,在基于定子磁场定向矢量控制策略的控制下,发电机的有功功率和无功功率实现了解耦控制。仿真全程功率的解耦控制效果如图15的功率曲线所示,即使在4 s时的大扰动风速下,控制系统仍能稳定地实现对发电机有功功率和无功功率的解耦控制。
4 结 论
利用空载运行、空载并网及MPPT控制仿真实验,对基于Matlab/Simulink搭建的双馈风力发电机空载并网仿真模型进行测试,仿真结果如下。
(1)空载变速工况时,在空载运行控制策略的控制下,发电机定子电压能以较快的速度和精度追踪电网电压的幅值、频率和相位,从而满足并网条件。
(2)空载并网瞬间冲击扰动小,并网后在发电运行控制策略的控制下,能较好地实现有功功率和无功功率的解耦控制。
(3)较大的风速扰动下,最大功率追踪控制仍能保证机组快速稳定地捕获风功率。
综上,本文所搭建的空载并网仿真模型较好地实现了双馈风力发电机组的各项控制功能,研究人员可以基于该平台进行更加深入的风电技术研究。
[1]LI J H, FANG J K, WEN I, et.al.Optimal trade-off between regulation and wind curtailment in the economic dispatch problem[J].CSEE Journal of Power and Energy Systems, 2015, 1(4): 37-45.
[2]刘其辉, 贺益康, 卞松江.变速恒频风力发电机空载并网控制[J].中国电机工程学报, 2004, 24 (3): 6-11.
LIU Qihui, HE Yikang, BIAN Songjiang.Study on the no-load current-in control of the variable-speed constant-frequency(VSCF) wind-power generator[J].Proceedings of the CSEE, 2004, 24(3): 6-11.
[3]王勇, 张纯江, 柴秀慧, 等.变速恒频风力发电机空载并网控制策略[J].电网技术, 2011, 35(9): 139-143.
WANG Yong, ZHANG Chunjiang, CHAI Xiuhui, et al.Control strategy for grid-connection of no-loaded variable speed constant frequency wind power generator[J].Power System Technology, 2011, 35(9): 139-143.
[4]曾志勇, 王清灵, 冯婧.变速恒频双馈风力发电负载并网控制[J].电力系统保护与控制, 2009, 37(15): 33-37.
ZENG Zhiyong, WANG Qingling, FENG Jing.Study on the load cutting-in control of the variable-speed constant-freqency(VSCF) wind-power generator[J].Power System Protection and Control, 2009, 37(15): 33-37.
[5]李建林, 赵栋利, 李亚西, 等.几种适合变速恒频风力发电机并网方式对比分析[J].电力建设, 2006, 27(5): 8-10, 17.
LI Jianlin, ZHAO Dongli, LI Yaxi, et al.Comparison and analysis on network synchronization modes of several kinds of variable speed constant frequency wind power generator[J].Electric Power Construction, 2006, 27(5): 8-10, 17.
[6]TAPIA G, SANTAMARIA G, TELLERIA M, et al.Methodology for smooth connection of doubly fed induction generators to the grid[J].IEEE Transactions on Energy Conversion, 2009, 24(4):959-971.
[7]方太勋, 吴小丹, 杨浩, 等.基于电压闭环的双馈风力发电软切入控制[J].电力自动化设备, 2011,31(2): 90-93.
FANG Taixun, WU Xiaodan, YANG Hao, et al.Soft cutting-in control based on voltage close-loop for doubly-fed wind power[J].Electric Power Automation Equipment, 2011,31(2): 90-93.
[8]贺益康, 郑康, 潘再平, 等.交流励磁变速恒频风电系统运行研究[J].电力系统自动化, 2004,28(13): 55-59, 68.
HE Yikang, ZHENG Kang, PAN Zaiping, et al.Investigation on an AC excited variable-speed constant-frequency wind-power generation system[J].Automation of Electric Power Systems, 2004, 28(13): 55-59, 68.
[9]张文娟, 高勇.引入比例:谐振控制器的双馈风电机空载并网控制[J].电力系统自动化, 2011, 35(18): 25-30, 35.
ZHANG Wenjuan, GAO Yong.Idle load cutting-in control of doubly-fed induction generators with proportional resonant controllers[J].Automation of Electric Power System, 2011, 35(18): 25-30, 35.
[10]赵宇, 郭清滔, 王奔, 等.基于变结构控制的交流励磁变速恒频风力发电机励磁控制研究[J].电力系统保护与控制, 2010, 38(15): 12-17, 23.
ZHAO Yu, Guo Qingtao, Wang Ben, et al.Research of AC excited VSCF wind power generator excitation control system based on variable structure control[J].Power System Protection and Control, 2010, 38(15): 12-17, 23.
[11]吴国祥, 马祎炜, 陈国呈, 等.双馈变速恒频风力发电空载并网控制策略[J], 电工技术学报, 2007, 22(7): 169-175.
WU Guoxiang, MA Yiwei, CHEN Guocheng, et al.Research on idle load grid-connection control strategy for variable-speed constant-frequency wind power generation[J].Transactions of China Electrotechnical Society, 2007, 22(7): 169-175.
[12]朱先玲, 吴雷.双馈风力发电系统空载并网控制与实验研究[J].电力电子技术, 2011, 45(8): 86-88.
ZHU Xianling, WU Lei.Grid connection control of the doubly-fed wind power system[J].Power Electronics,2011, 45(8): 86-88.
[13]杨淑英, 张兴, 张崇巍, 等.变速恒频双馈风力发电机投切控制策略[J].中国电机工程学报, 2007, 27(17), 103-108.
YANG Shuying, ZHANG Xing, ZHANG Chongwei, et al.Cut-in/out control strategies for doubly fed induction generator driven by variable-speed wind turbine[J].Proceedings of the CSEE, 2007, 27(17): 103-108.
[14]马宏伟, 许烈, 李永东.基于直接虚功率控制的双馈风电系统并网方法[J].中国电机工程学报, 2013, 33(3), 99-105.
MA Hongwei, XU Lie, LI Yongdong.Direct virtual power control of doubly fed induction generators for grid connection[J].Proceedings of the CSEE, 2013, 33(3): 99-105.
[15]孙丹, 方扬, 孙士涛, 等.双馈异步风力发电机无差拍直接功率控制及延时补偿[J].电工技术学报, 2013, 28(11): 70-77.
SUN Dan, FANG Yang, SUN Shitao, et al.Dead-beat direct power control of doubly fed induction generators with delay compensation[J].Transactions of China Electrotechnical Society, 2013, 28(11): 70-77.
[16]张全森.基于u-ω型定子磁链观测的风力双馈发电机P、Q解耦[J].电力学报, 2009, 24(6): 459-462, 466.
ZHANG Quansen.Decoupled control forPandQof DFIG base on stator flux observer[J].Journal of Electric Power, 2009, 24(6): 459-462, 466.
[17]张安安, 郭红鼎, 于兵, 等.一种风电机组在低风速区间的功率控制方法[J].电力系统保护与控制, 2015, 43(23): 84-89.
ZHANG Anan, GUO Hongding, YU Bing, et al.A power control method of wind turbines in low wind speed area [J].Power System Protection and Control, 2015, 43(23): 84-89.
[18]任永峰, 安中全, 李静立, 等.双馈风力发电机组柔性并网运行与控制[M].北京: 机械工业出版社, 2011, 125-130.
[19]范心明.基于SIMULINK的SVPWM仿真[J].电气传动自动化, 2009, 31(3): 19-21, 34.
FAN Xinming.Simulation of SVPWM based on SIMULINK[J].Electric Drive Automation, 2009, 31(3): 19-21, 34.
[20]贺益康.胡家兵.并网双馈异步风力发电机运行控制[M].北京: 中国电力出版社, 2012: 29-31.
[21]MEI F, PAL B C.Modal analysis of a grid connected doubly-fed induction generator[C]//The 3rd IET International Conference on Power Electronics, Machines and Drives, 2006.2006: 611-615.
[22]MISHRA Y, MISHRA S, TRIPATHY M, et al.Improving stability of a DFIG-based wind power system with tuned damping controller[J].IEEE Transactions on Energy Conversion, 2009, 24(3): 650-660.
(编辑 景贺峰)
Modeling and Simulation of No-Load Cutting-In Operation Control for Doubly-Fed Induction Generator
LAN Fei, YAO Zhiyang, LI Jinghua, TAO Li
(Guangxi Key Laboratory of Power System Optimization and Energy Technology(Guangxi University),Nanning 530004,China)
This paper proposes a two-stage control scheme of ‘no load - grid connected’ to realize the smooth state transferring from ‘no load’ to ‘grid connected’, according to the characteristics of ‘no load’ and ‘grid connected’ of doubly-fed induction generator (DFIG).Based on the Matlab/Simulink platform, we establish the simulation models of a no-load operation and a grid-connected operation of DFIG respectively, and give the simulation module and parameters based on the stator field-oriented vector control technology, which provides important basic information and platform for the research on the grid connected control technology of DFIG.Then, we propose a set of the simulation experiment scheme for ‘no load - grid connected’ DFIG, which can obtain comprehensive results for testing the control strategies.Finally, we verify the effectiveness of the proposed control strategies and simulation model, through the simulation results of the no-load operation, the transient process at the cutting-in moment, and the maximum power energy tracking (MPPT) after grid-connected operation.
doubly-fed induction generator (DFIG); no-load cutting-in; stator field-oriented control; maximum power energy tracking (MPPT); modeling and simulation
国家自然科学基金项目(51277034)
Project supported by National Natural Science Foundation of China (51277034)
TM 614
A
1000-7229(2016)09-0123-09
10.3969/j.issn.1000-7229.2016.09.017
2016-05-19
兰飞(1974),男,硕士,高级工程师,硕士生导师,主要研究方向为风力发电机组安全运行与控制;
姚知洋(1990),男,硕士研究生,本文通信作者,主要研究方向为变速恒频双馈异步风力发电技术;
黎静华(1982),女,教授,博士生导师,主要研究方向为电力系统优化运行与控制,大规模风电并网运行等;
陶丽(1990),女,硕士研究生,主要研究方向为变速恒频双馈异步风力发电技术。
猜你喜欢
大电机技术(2022年3期)2022-08-06
湖南电力(2022年3期)2022-07-07
电机与控制应用(2022年4期)2022-06-27
大电机技术(2022年1期)2022-03-16
防爆电机(2022年1期)2022-02-16
防爆电机(2021年6期)2022-01-17
山东工业技术(2016年15期)2016-12-01
山东工业技术(2016年15期)2016-12-01
电测与仪表(2016年10期)2016-04-12
电测与仪表(2016年7期)2016-04-12
