基于频域分析的挠性卫星姿态高稳定度控制
2017-01-07 02:33张超孙延超李传江马广富
电机与控制学报 2016年12期
张超, 孙延超, 李传江, 马广富
(哈尔滨工业大学 控制科学与工程系,黑龙江 哈尔滨 150001)
基于频域分析的挠性卫星姿态高稳定度控制
张超, 孙延超, 李传江, 马广富
(哈尔滨工业大学 控制科学与工程系,黑龙江 哈尔滨 150001)
在考虑外界干扰和挠性振动的影响下,针对卫星姿态的高稳定度控制需求提出了一种控制方案,并给出控制参数的整定方法。采用传统的PD控制结合干扰补偿器的控制方法完成姿态稳定任务。干扰补偿器的设计运用了鲁棒模型匹配的原理,并通过减小干扰输入到角速度输出的幅频响应以提高姿态控制的稳定度。分别给出了挠性影响化作广义干扰和未化作广义干扰时的传递函数模型,然后用频域分析的方法分析了引入干扰补偿器后系统的开环特性以及干扰抑制的性能,并证明了系统的鲁棒稳定性。仿真表明,所采用的姿态控制方法有效抑制了挠性振动,并提高了姿态控制的精确度与稳定度。方法设计简单,容易实现,适于工程应用。
挠性卫星;姿态控制;高稳定度;频域分析;干扰补偿器
0 引 言
为完成复杂的空间任务,一般需要卫星具有较大的尺寸并且安装有各种挠性附件,如太阳帆板、运动天线等。此类卫星在运行过程中,由于外界干扰和挠性附件振动等因素,星体的姿态稳定性将受到影响。
空间激光通信、地球观测等任务通常要求卫星具有较高的姿态控制精确度与稳定度。1995年发射的加拿大雷达卫星,带有一个大型合成孔径雷达天线,对姿态控制的稳定度提出较高的要求[1]。我国在2012年发射的第一颗民用立体测绘卫星“资源三号”[2],用于立体测图和数字影像的制作,为了获得准确的定位和较高的成像分辨率,要求姿态控制的精确度与稳定度满足给定的指标。文献[3-5]同样都以高精确度、高稳定度为姿态控制的目标进行了研究。
挠性卫星姿态控制系统是具有参数及动态不确定性,并且受各种干扰影响的非线性系统,由于对姿态控制指标要求的提高,增加了控制难度。因此,设计合理、有效的姿态控制方法,是值得研究的问题。文献[6-7]结合PD控制方法研究带有挠性帆板的卫星的姿态控制问题,设计了一种干扰补偿器来抑制模态振动和外界干扰,但是方法中都将挠性影响当成了干扰,并且没有分析挠性存在时对补偿器性能产生的影响,也没有给出参数整定方法。文献[8]针对多体卫星姿态控制问题,设计了双闭环自抗扰控制器,通过仿真验证了在鲁棒性和干扰抑制等方面优于传统的PID控制器,然而该控制器在应用中有较多的可调参数,且参数的选取没有规律性方法,只能靠反复的工程试验。哈勃空间望远镜[9-10]和法国的SPOT5卫星[11]采用H∞理论设计了姿态控制器。考虑到挠性卫星存在未建模动态、不确定性及干扰等问题,文献[12]运用H∞混合灵敏度方法设计了鲁棒姿态控制器,仿真结果表明该方法相比于PID控制器有更好的控制性能,然而有较高的阶数。文献[13]介绍了H∞控制方法以及在挠性卫星姿态控制中的应用,然而H∞控制的最大缺点在于权函数的选择主要依靠设计者的经验。文献[14]采用自适应模糊滑模控制,获得了较高的姿态控制精确度。考虑到大型天线在作变速运动时对星体姿态影响较为严重,文献[15]运用Lyapunov理论结合神经网络逼近方法设计了变结构姿态控制器,并引入扰动补偿力矩,仿真表明姿态稳定度达到给定指标。
上述已有文献中提到的结果,姿态控制器设计及稳定性证明较复杂,参数较多且难以整定,不适于实际工程应用。本文在考虑外界干扰及挠性影响下,针对卫星姿态的高稳定度控制需求,提出一种控制器。采用了传统PD控制与干扰补偿器相结合的方法。干扰补偿器依据鲁棒模型匹配原理进行设计,通过频域分析,验证了干扰补偿器的性能,同时给出了PD参数与补偿器参数整定方法。
1 挠性卫星姿态模型
考虑卫星安装有两块太阳能挠性帆板,且帆板相对于卫星本体无转动。卫星姿态动力学方程形式如下[16]
(1)
帆板的模态振动方程为
(2)

(3)
采用欧拉角描述卫星姿态,并考虑x-y-z转序,相应的转动姿态角分别为滚动角φ、俯仰角θ和偏航角ψ。卫星作惯性定向飞行时,ωs可表示为[17]
(4)
由式(4)得到卫星姿态运动学方程为
(5)
采用小角度假设对模型(1)和模型(2)进行化简,忽略耦合项,为便于分析仅考虑单一挠性附件并以俯仰角θ为例进行说明(滚动轴和偏航轴的分析方法类似)。对于ηi略去下标i,用ηj表示ηi的第j阶模态坐标,同理ξj和Ωj表示第j阶模态阻尼比和频率,Fsj为第j阶的模态振动与转动耦合系数,写成频域形式有:
(6)
式中:Iy为俯仰轴对应的转动惯量分量,T为控制力矩和干扰力矩的总和。通过式(6)中第二个式子导出模态坐标ηj与俯仰角θ的关系,代入式(6)中第一个式子,并消去ηj得
(7)
根据式(7)可以画出简化的卫星俯仰通道姿态控制方框图,如图1所示。其中θd表示期望俯仰角,C(s)表示控制器的传递函数,W(s)表示执行机构的动力学模型。

图1 挠性卫星俯仰轴简化模型Fig.1 Pitch axis simplified model of flexible satellites
2 干扰补偿器设计
2.1 干扰补偿器原理
本节采用鲁棒模型匹配原理[6]设计干扰补偿器。鲁棒模型匹配以经典控制理论为依据,设计过程中考虑了干扰及不确定性等因素,设计目标在于使干扰到所关心输出的传递函数等于或近似为零。如图2所示,通过观测输出y和控制对象的逆传递函数,就可以近似得到外界干扰,然后将其引入控制系统中进行补偿,理论上便消除了干扰产生的影响。在图2中,M(s)可以表示干扰观测器,用于对干扰进行估计,L(s)项需要满足一定的函数转换关系,保证干扰补偿的正确性,Fr(s)是一个滤波器,用于限定干扰抑制的带宽。
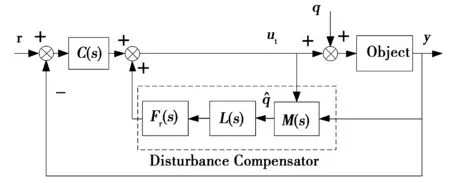
图2 干扰补偿器原理Fig.2 Design principle of the disturbance compensator
2.2 俯仰轴干扰补偿器设计
进一步简化图1中控制系统模型,将挠性模态影响全部归入干扰中,得到图3所示的框图。

图3 挠性影响归入广义干扰的简化模型Fig.3 Simplified model with flexible influence classified into generalized disturbances

(8)
为了消除广义干扰的影响,需要在控制器对应的控制力矩基础上添加的补偿器力矩zt为
(9)
相应的需要添加到执行机构的执行指令zc可以根据W(s)的模型结合式(9)逆推得到
(10)
飞轮执行机构的模型W(s)可以简化为一阶惯性环节[6]
(11)
注1:此时飞轮的逆传递函数W-1(s)=1+τys物理上一般无法直接实现,通常采取近似的形式求取,考虑到本文控制器具有鲁棒性,因此允许存在一定的近似误差。
注2:实际上飞轮时间常数τy存在摄动,但文中此处并不考虑τy的摄动影响,干扰补偿器设计过程中直接采用飞轮的标称模型W(s)。
给定滤波器Fr(s)限定干扰抑制的带宽,可以获得干扰补偿器Z的最终形式如下
(12)
干扰补偿器设计过程中,挠性振动的影响被归入广义干扰处理,所以可以认为系统对模态参数的变化具有一定的鲁棒性。
滤波器Fr(s)对于干扰补偿器的干扰抑制性能起关键作用,因此必须合理设计。Fr(s)可以选取为
(13)
式中:α、β、γ是待设计参数。可以看出Fr(s)是由以α、β、γ为截止频率的三个低通滤波器串联组成的,因此以上三个参数的选取,将决定干扰补偿器的性能。α、β、γ的值越大,Fr(s)越趋近于1;当α、β、γ取值较小时,则不能有效地抑制期望频率范围内的干扰。
3 系统频域分析
以PD控制器为基础,引入式(12)所给出的干扰补偿器。首先给出挠性影响广义干扰化和非广义干扰化情况下的频域分析模型,用以验证补偿器在提高姿态稳定度方面的性能;然后对系统进行鲁棒稳定性分析;最后代入具体数值,讨论控制参数和滤波器Fr(s)参数变化时对系统性能的影响,同时结合鲁棒稳定性条件约束,为参数整定提供依据。
3.1 挠性影响广义干扰化情况
俯仰通道采用PD控制[17],引入干扰补偿器(12)。将挠性影响当作广义干扰时,系统框图如图4所示。其中,C(s)=kpy+kdys为PD控制器传递函数。

图4 引入干扰补偿器的俯仰轴系统框图Fig.4 Pitch axis system diagram with compensator
根据图4得此通道的开环和闭环传递函数为:
(14)
(15)
可以看出此时系统的开环和闭环传递函数与未引入干扰补偿器时的完全相同,与参数τy、Iy、kpy、kdy有关,而与滤波参数α、β、γ无关。因此,引入干扰补偿器后不影响系统稳定性及响应特性。
为突出所关注的姿态稳定度问题,考虑干扰输入到角速度输出的传递函数
(16)
在未引入干扰补偿器时,相应输入输出关系的传递函数为
(17)
(18)
由式(18)的形式可知,在Fr(s)=1的理想情况下,Wqy(s)恒为零,即干扰不会对系统角速度输出造成影响。但带宽无穷大的滤波器实际中不可实现,因此在应用干扰补偿器时,合理选取滤波参数α、β、γ的取值对于提高姿态稳定度有着重要的作用。
3.2 挠性影响非广义干扰化情况
如果考虑挠性影响,且不将其当作广义干扰,得到的系统框图如图5所示。
将挠性影响传递函数记为∑,即
(19)
可得无干扰补偿器时系统的开环和闭环传递函数
(20)
(21)
引入干扰补偿器后两传递函数为:
(22)
(23)
可以看出,当挠性影响非广义干扰化时,引入干扰补偿器可以削弱挠性对系统性能造成的影响,如果[1-Fr(s)]足够小,则挠性影响可以被忽略。
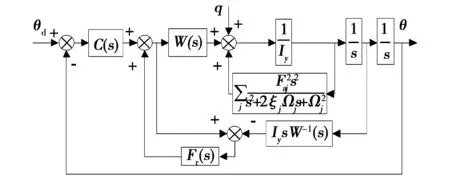
图5 考虑挠性且引入干扰补偿器时的俯仰通道系统框图Fig.5 Pitch axis system diagram with compensator when considering flexibility
未引入和引入干扰补偿器时,干扰到角速度的传递函数为:
(24)
(25)
同样可以得出结论:引入干扰补偿器后能有效抑制干扰对角速度的影响,有利于提高姿态控制稳定度。
注3:常规PID姿态控制器对于干扰的抑制主要靠积分环节产生作用,而积分环节是靠姿态误差的累积产生控制效果,因此具有一定的滞后性,并且若采用飞轮等存在幅值力矩限制的执行机构,将存在积分饱和现象,一旦发生将严重影响姿态控制性能甚至造成星体姿态失控。而基于干扰补偿器的PD姿态控制器是对干扰进行实时补偿,不存在滞后性,并且不存在积分饱和现象。
3.3 系统鲁棒稳定性分析
根据3.1节的挠性广义干扰化模型,将干扰当作反馈不确定性,如图6所示。
其中,不确定性Δ的输入和输出分别为z和w。可知从w到z的传递函数为式(16)的形式,根据小增益定理,鲁棒稳定性的条件是闭环系统内部稳定且满足[18]
(26)
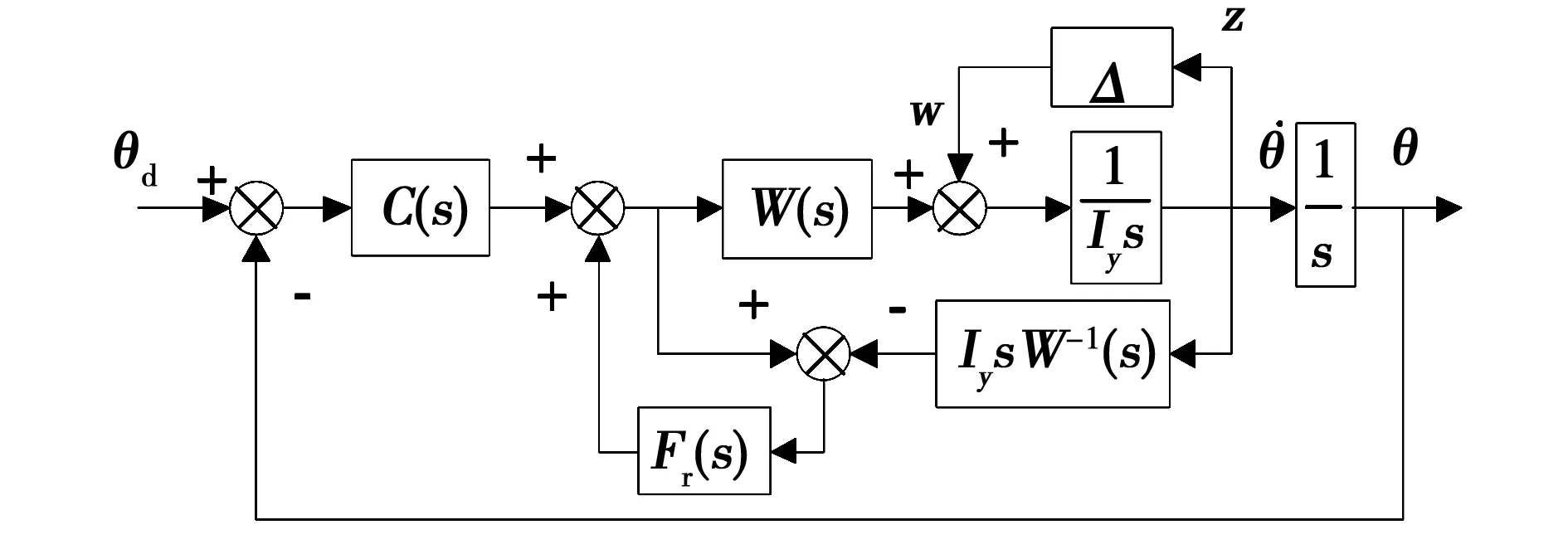
图6 鲁棒稳定性分析模型Fig.6 Robust stability analysis model
3.4 参数变化对系统性能的影响分析
从3.1节和3.2节的分析可知系统的控制效果可以通过调节控制器参数或滤波器参数进行改善,下面在3.2节的挠性影响非广义干扰化模型中代入具体参数进行频域分析,分别考虑了干扰补偿器参数变化和PD参数变化时的情况。
3.4.1 仅改变干扰补偿器参数时对系统影响分析
根据文献[17]的参数整定原则,选取PD参数kpy=15/500·Iy、kdy=130/500·Iy;选取滤波器参数α=β=γ,且分别为0.1 Hz、0.29 Hz、0.55 Hz、1 Hz、10 Hz;截取挠性前5阶模态。具体其他参数如表1所示。两块挠性太阳帆板的模态频率与阻尼比相同。

表1 频域分析中用到的参数
图7~图9给出未引入、引入干扰补偿器以及改变滤波参数时系统开环和干扰到角速度的频率特性。为作比较说明,系统开环特性中加入了不考虑挠性时(可认为挠性影响传递函数∑为零)的曲线。
从图7和图8中可以看出引入干扰补偿器后,系统的开环频率响应的变化发生在中低频处,随着滤波参数的增加,频率特性中由于挠性存在所造成的波动逐渐减小。从图9可以看出,引入干扰补偿器后干扰到角速度的闭环幅频特性在低频段下移,并且滤波参数越大,曲线下移越明显。
因此,干扰补偿器减弱了干扰对角速度的影响,且滤波参数越大,对干扰影响的削弱效果越好。

图7 系统开环频率特性Fig.7 System open-loop frequency characteristics
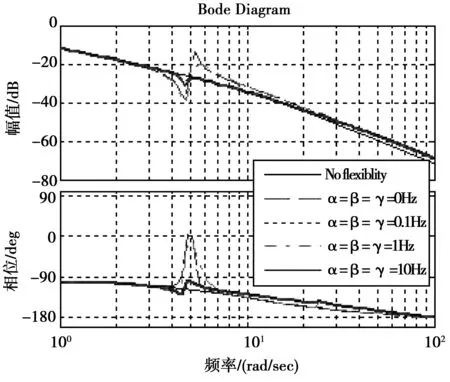
图8 开环特性局部放大图Fig.8 Partial enlargement of open-loop characteristics
考虑式(26)所示的鲁棒稳定性条件,代入相应参数求解‖φ‖的值,在α=0时有

(27)
又因为随着滤波参数α、β、γ的增加,幅值增益呈减小的趋势,所以在滤波参数所能允许选取的范围内满足小增益定理,系统是鲁棒稳定的。
3.4.2 仅改变比例参数kp时对系统的影响分析
在3.4.1节基础上,考虑干扰补偿器中滤波器参数α、β、γ取0.55Hz时,改变kp的值。将kpy分别取为kpy1=15/500·Iy、kpy2=35/500·Iy、kpy3=55/500·Iy、kpy4=75/500·Iy、kpy5=95/500·Iy,kdy=130/500·Iy。

图9 干扰输入到角速度输出的幅频特性Fig.9 Magnitude frequency characteristics from disturbances to angular velocity
图10~图11给出系统的开环以及干扰到角速度的频率特性。高频段频率特性近似相同,因此截去。
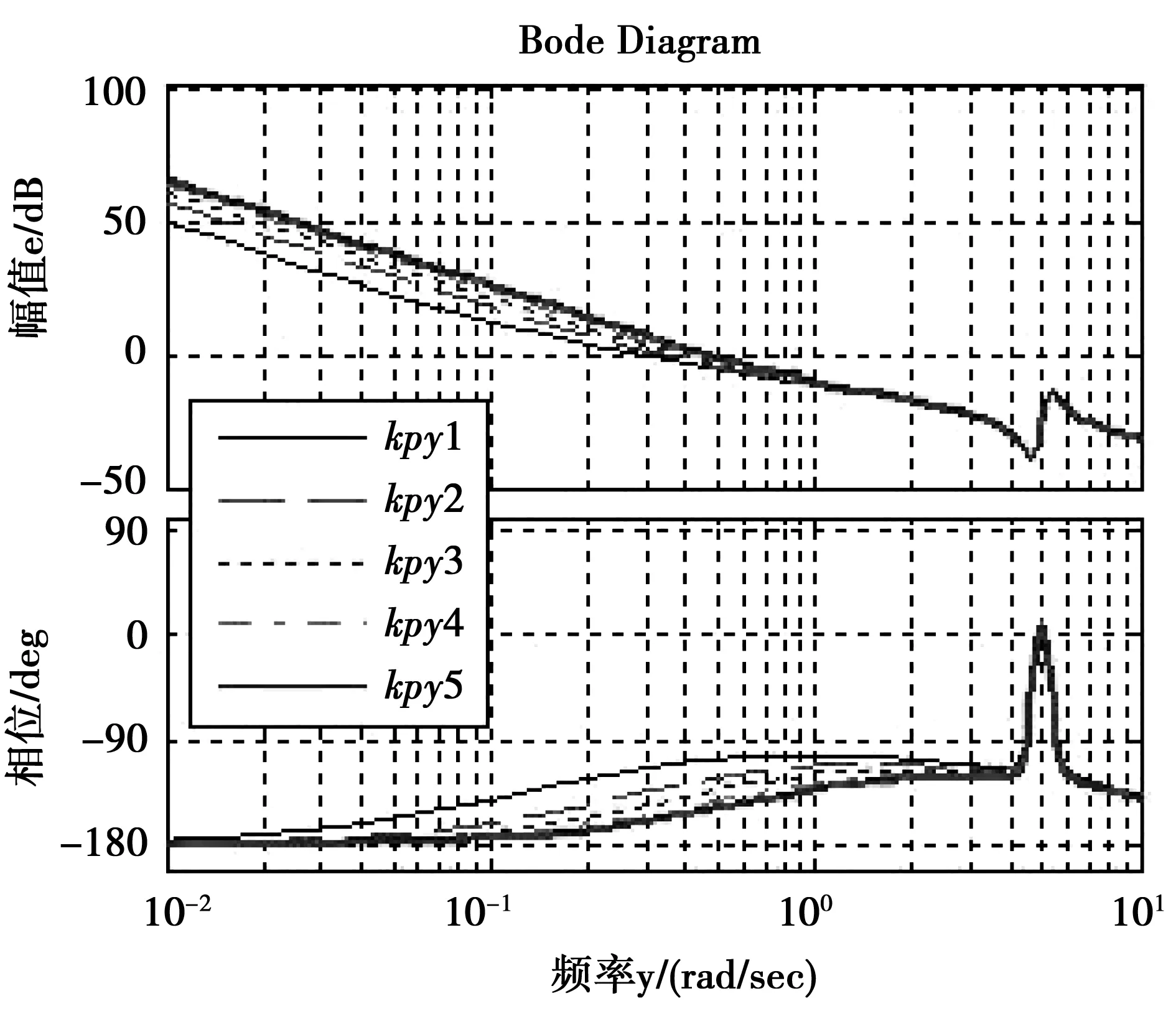
图10 系统开环频率特性Fig.10 Open-loop frequency characteristics
随着kp的增加:从图10的开环特性可以看出,在低频段幅频特性有微小的上移,相频特性曲线下移,因此系统稳定裕度逐渐降低;图11表明,在低频段某频率之前,干扰对角速度的影响逐渐减弱。
通过本节的频域分析,可以得出如下结论:
1)引入干扰补偿器后可以降低挠性附件振动对系统造成的影响;

图11 干扰输入到角速度输出的幅频特性Fig.11 Magnitude frequency characteristics from disturbances to angular velocity
2)引入干扰补偿器后可以有效削弱干扰对角速度输出产生的影响,有助于提高姿态控制稳定度,而且随着滤波器参数的增大,对干扰削弱效果增强;
3)增加PD控制器参数kp的值,可以一定程度的减弱干扰的影响作用,但不同于改变干扰补偿器的滤波参数,改变kp的值会减小系统相角裕度,影响系统稳定性。
4 仿真分析
对三轴分别设计PD控制器加干扰补偿器应用到某完整挠性卫星姿态模型中。仿真考虑帆板的前5阶模态,具体姿态模型参数在表2中给出。
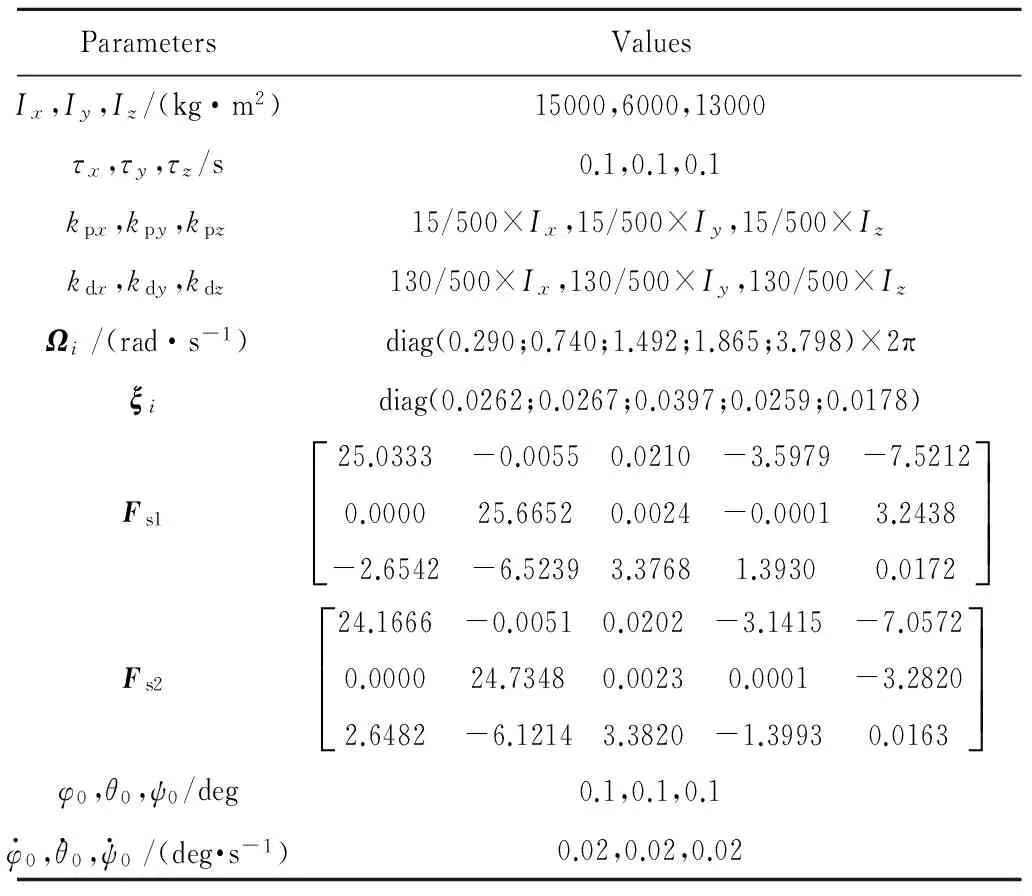
表2 仿真参数Table 2 Simulation parameters
此外,实际任务中往往要求姿态控制精确度与稳定度在一定的时间范围内达到较高的指标要求,仿真中选取的时间范围为300s。
以下分别给出未引入、引入干扰补偿器且滤波参数取0.29Hz时以及为作对比分析,采用PID控制时的仿真结果,如图12~图19。
1)未引入干扰补偿器时的情况
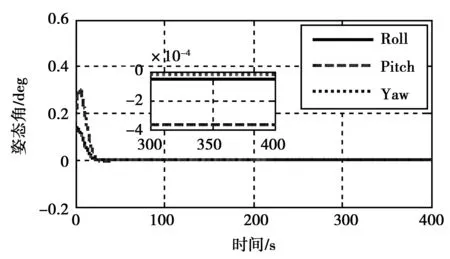
图12 姿态角Fig.12 Attitude angles

图13 姿态角速度Fig.13 Attitude angular velocities

图14 星体Y轴正方向帆板的模态坐标Fig.14 Modal coordinates of solar array in the positive direction of axis Y
2)引入干扰补偿器情况(α=β=γ=0.29Hz)

图15 姿态角Fig.15 Attitude angles
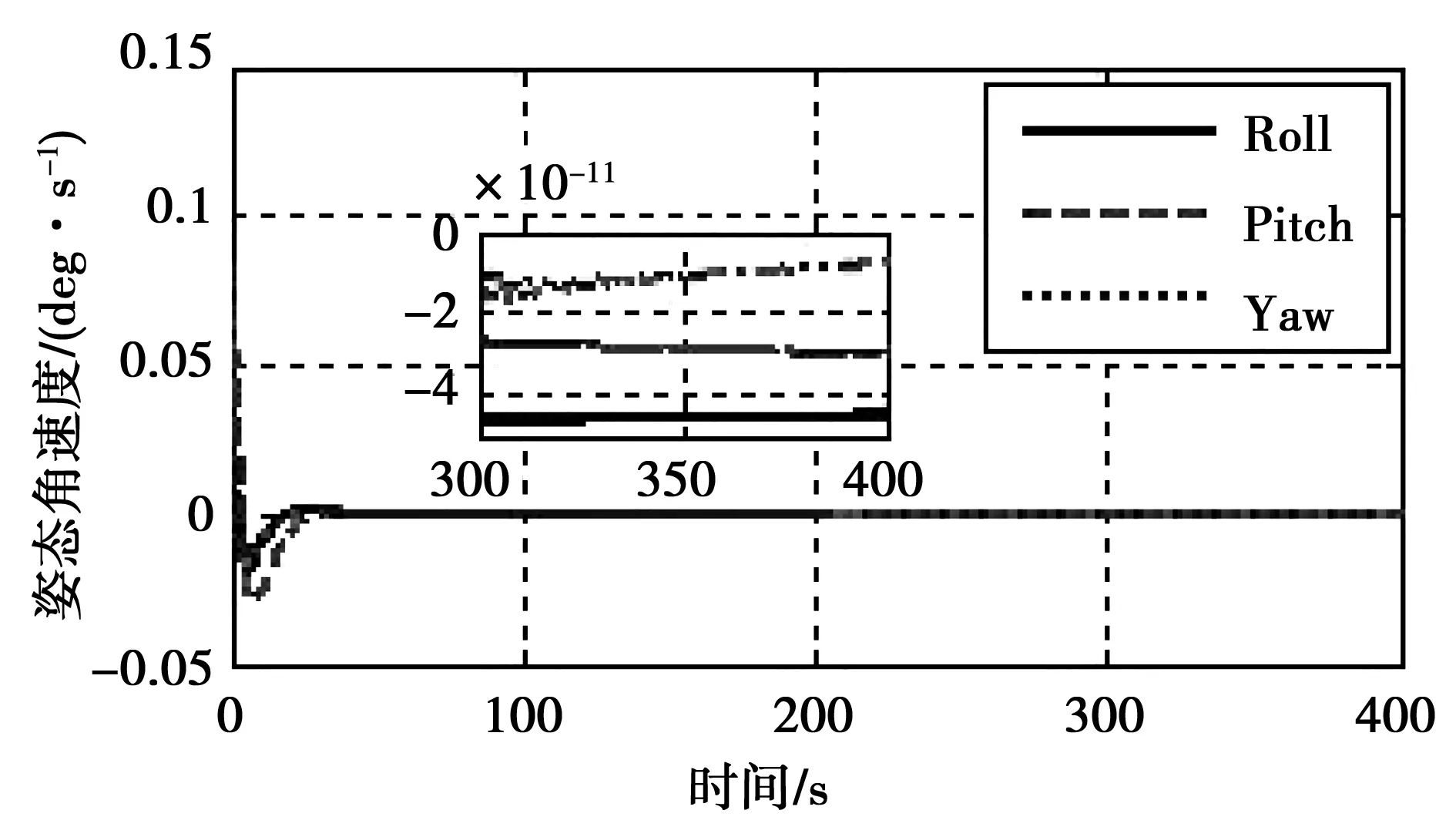
图16 姿态角速度Fig.16 Attitude angular velocities
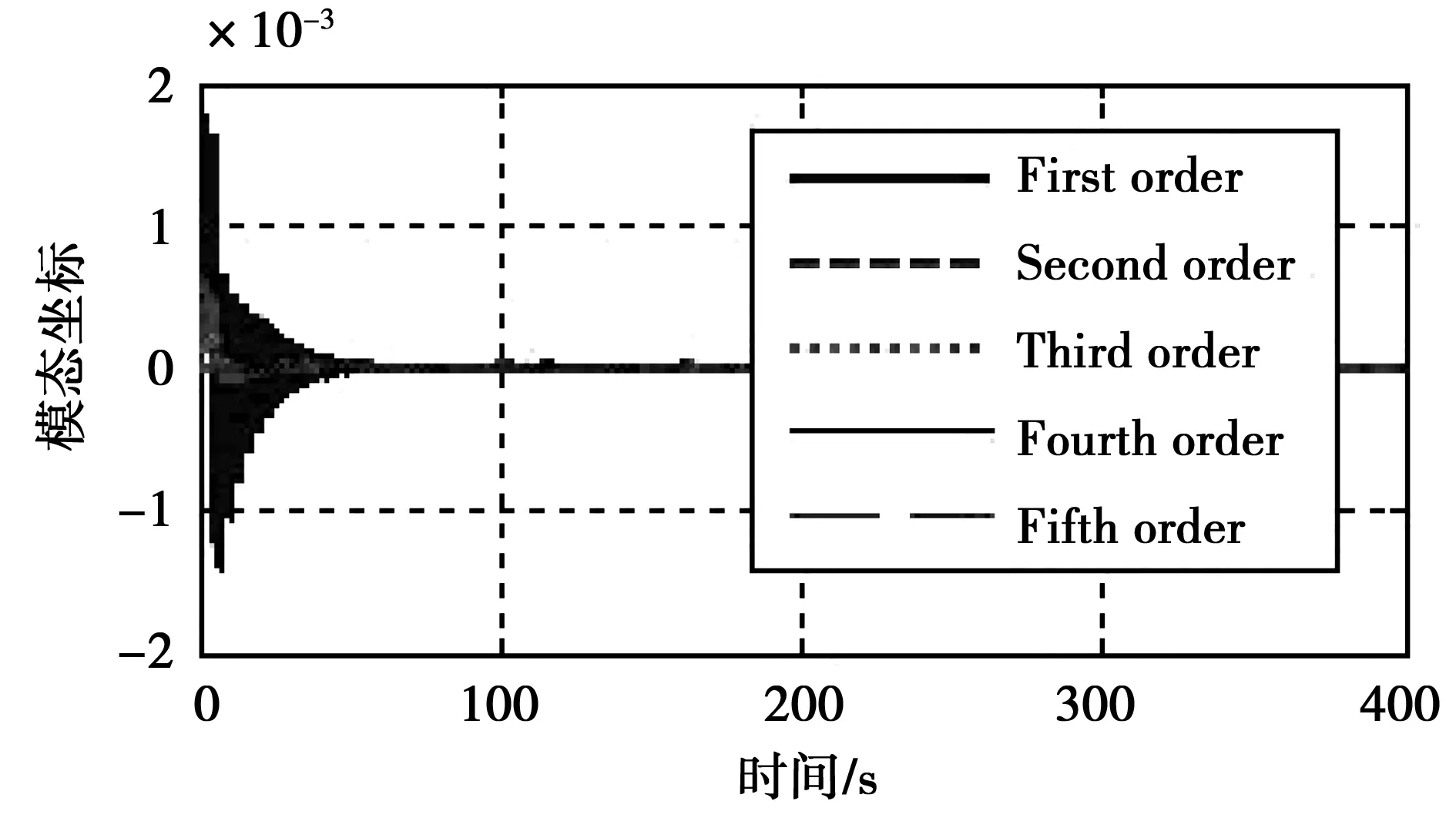
图17 星体Y轴正方向帆板的模态坐标Fig.17 Modal coordinates of solar array in the positive direction of axis Y
3)PID控制方法(kix=8、kiy=5、kiz=8)
从图12~图19的仿真结果可以看出,在300秒时间范围内三种控制方法情况下卫星姿态最终都趋于稳定,并且有效的抑制了模态振动。如图12和图13所示,未引入干扰补偿器时,三轴姿态控制精确度达到4×10-4(deg),稳定度为2×10-8(deg/s);如图15和图16所示,引入干扰补偿器后,姿态控制精度与稳定度分别优于2×10-8(deg)和4×10-11(deg/s),相比于未引入干扰补偿器时,控制效果有较大的提高。通过比较图15~图16与图18~图19可以看出,采用干扰补偿器的PD控制方法在姿态控制精确度和稳定度指标方面明显优于PID控制方法。

图18 姿态角Fig.18 Attitude angles
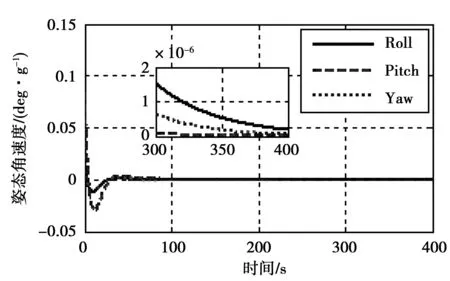
图19 姿态角速度Fig.19 Attitude angular velocities
表3给出了干扰补偿器滤波器参数在取为某些典型值时的挠性卫星三轴姿态控制精确度与稳定度情况。
从表3中可以看出随着干扰补偿器滤波参数的增加,系统精确度与稳定度整体呈提高趋势。考虑到滤波参数的增大会使对干扰的抑制效果增强,进而相应的增大控制力矩消耗,所以实际应用中综合各种因素,将滤波参数值取为挠性振动一阶频率附近为宜。

表3 不同滤波参数下的姿态控制精度和稳定度Table 3 Attitude control precision and stability of different filter parameters
5 结 论
本文主要研究了挠性卫星的高稳定度姿态控制问题。根据鲁棒模型匹配原理设计了干扰补偿器,并与PD控制器结合应用于挠性卫星姿态控制系统中。采用频域分析方法分析了引入干扰补偿器后系统的性能,重点研究了干扰到角速度输出的频率特性,验证了干扰补偿器对挠性振动影响的削弱作用以及对干扰的抑制作用,即干扰补偿器可以有效提高系统的姿态稳定度。将所设计的方法运用到完整三轴挠性卫星模型中进行仿真,结果表明该方法提高了姿态控制精确度与稳定度。方法设计简单,容易实现,适于工程应用。
文中在飞轮为执行机构的情况下,论证了方法的可行性。当使用推力器作为执行机构时,由于难以获得其传递函数,应用本文控制方法时将遇到困难,后续将进行进一步的研究。
[1] 胡庆雷.挠性航天器姿态机动的主动振动控制[D].哈尔滨: 哈尔滨工业大学,2006.
[2] 李德仁.我国第一颗民用三线阵立体测图卫星——资源三号测绘卫星[J].测绘学报,2012,41(3): 317-322. LI Deren.China’s first civilian three-line-array stereo mapping satellite: ZY-3[J].Acta Geodaetica et Cartographica Sinica,2012,41(3): 317-322.
[3] SAWADA H,HASHIMOTO T,NINOMIYA K.High-stability attitude control of satellites by magnetic bearing wheels[J].Transactions of the Japan Society for Aeronautical and Space Sciences,2001,44(145): 133-141.
[4] 李广兴,周军,周凤岐.挠性航天器高精度智能控制方案研究[J].宇航学报,2006,27(6): 1196-1200. LI Guangxing,ZHOU Jun,ZHOU Fengqi.Intelligent control research for high precision attitude of flexible spacecraft[J].Journal of Astronautics,2006,27(6): 1196-1200.
[5] 斯祝华,刘一武.帆板驱动影响下的卫星姿态高精度高稳定度控制[J].宇航学报,2010,31(12): 2697-2703. SI Zhuhua,LIU Yiwu.High accuracy and high stability attitude control of a satellite with a rotating solar array[J].Journal of Astronautics,2010,31(12): 2697-2703.
[6] YAMASHITA T,OGURA N,KURII T,et al.Improved satellite attitude control using a disturbance compensator[J].Acta Astronautica,2004,55(1): 15-25.
[7] LIU Hua,GUO Lei,ZHANG Yumin.An anti-disturbance PD control scheme for attitude control and stabilization of flexible spacecrafts[J].Nonlinear Dynamics,2012,67(3): 2081-2088.
[8] 朱承元,杨涤,杨旭.大挠性多体卫星的自抗扰姿态控制系统设计[J].航天控制,2004,22(6): 25-31. ZHU Chengyuan,YANG Di,YANG Xu.Design of the active disturbance rejection attitude control system for large flexible multi-body satellite[J].Aerospace Control,2004,22(6): 25-31.
[9] WIE B,LIU Qiang,BAUER F.Classical and robust H∞control redesign for the Hubble Space Telescope[J].Journal of Guidance,control,and Dynamics,1993,16(6): 1069-1077.
[10] IRWIN R D,GLENN R D,FRAZIER W G,et al.Analytically and numerically derived H-infinity controller designs for Hubble Space Telescope[J].Journal of Guidance,Control,and Dynamics,1995,18(2): 214-221.
[11] VALENTINC C,DUC G,BALLOIS S L.Low-order robust attitude control of an earth observation satellite[J].Control Engineering Practice,1999,7(4): 493-506.
[12] 宋斌,马广富,李传江,等.基于H∞鲁棒控制的挠性卫星姿态控制[J].系统仿真学报,2005,17(4):968-970,985. SONG Bin,MA Guangfu,LI Chuanjiang,et al.Attitude control of flexible satellite using H∞-based robust control law[J].Journal of System Simulation,2005,17(4): 968-970,985.
[13] NDEZ CUBILLOS X C,DE SOUZA L C G.Using of H-infinity control method in attitude control system of rigid-flexible satellite[J].Mathematical Problems in Engineering,2010,2009: 1-9.
[14] GUAN Ping,LIU Xiangjie,LIU Jizhen.Adaptive fuzzy sliding mode control for flexible satellite[J].Engineering Applications of Artificial Intelligence,2005,18(4): 451-459.
[15] 李广兴,周军,周凤岐.多体卫星高稳定度智能控制方案研究[J].空间科学学报,2007,27(2): 151-156. LI Guangxing,ZHOU Jun,ZHOU Fengqi.Intelligent control research of multibody satellite for high stabil-ity[J].Chinese Journal of Space Science,2007,27(2): 151-156.
[16] DI GENNARO S.Passive attitude control of flexible spacecraft from quaternion measurements[J].Journal of optimization theory and applications,2003,116(1): 41-60.
[17] 李传江,郭延宁,张永合,等.基于时频域分析的轮控航天器姿态控制规律参数整定[J].宇航学报,2011,32(11): 2319-2325. LI Chuanjiang,GUO Yanning,ZHANG Yonghe,et al.Parameter tuning for the attitude control algorithm of wheel controlled spacecraft based on time and frequency domain analysis[J].Chinese Journal of Astronautics,2011,32(11): 2319-2325.
[18] ZHOU Kemin,DOYLE J C,GLOVER K.Robust and optimal control[M].New Jersey: Prentice hall,1996.
(编辑:贾志超)
High stability attitude control for flexible satellite based on frequency-domain analysis
ZHANG Chao, SUN Yan-chao, LI Chuan-jiang, MA Guang-fu
(Department of Control Science and Engineering,Harbin Institute of Technology,Harbin 150001,China)
Considering external disturbances and flexible vibration,a scheme for satellites high stability attitude control and its parameter tuning method are presented.Traditional PD controller was applied to realize attitude stabilization combining with the disturbance compensator.The disturbance compensator was designed using robust model matching principle.By reducing the magnitude-frequency response from disturbances to angular velocities,the attitude stability was improved.Transfer function models were provided according to the flexible effects being regarded as generalized disturbances or not,respectively.Then the frequency characteristics of the system were analyzed through frequency domain method to demonstrate the effectiveness of the disturbance compensator.And it is proved that the system can reach robust stability.Simulation results show that the attitude control strategy effectively improve the precision and stability and suppresses the flexible vibration.The proposed method is easy to achieve and suitable for engineering application.
flexible satellite; attitude control; high stability; frequency-domain analysis; disturbance compensator
2015-03-01
国家自然科学基金(61304005,61174200,61403103);国家973计划项目(2012CB720000);高等学校博士学科点专项科研基金(20102302110031)
张 超(1988—),男,博士研究生,研究方向为航天器姿态控制; 孙延超(1987—),男,博士研究生,研究方向为航天器姿态控制、航天器编队控制; 李传江(1978—),男,教授,博士生导师,研究方向为航天器姿态控制、最优控制; 马广富(1963—),男,教授,博士生导师,研究方向为航天器姿态控制、航天器编队控制、最优控制。
马广富
10.15938/j.emc.2016.12.012
V 448.22
:A
:1007-449X(2016)12-0092-09
猜你喜欢
导弹与航天运载技术(2022年2期)2022-05-09
湖南电力(2021年4期)2021-11-05
自动化学报(2018年2期)2018-04-12
制造技术与机床(2017年3期)2017-06-23
制造技术与机床(2017年3期)2017-06-23
电子制作(2017年2期)2017-05-17
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年4期)2016-04-04
北京航空航天大学学报(2016年3期)2016-02-27
空间控制技术与应用(2015年1期)2015-06-05