一类非线性系统的自组织模糊神经网络控制
2017-01-07 02:32李安平刘国荣
电机与控制学报 2016年12期
李安平, 刘国荣
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.湖南工程学院 理学院,湖南 湘潭 411104;3.湖南工程学院 电气信息学院,湖南 湘潭 411104)
一类非线性系统的自组织模糊神经网络控制
李安平1,2, 刘国荣1,3
(1.湖南大学 电气与信息工程学院,湖南 长沙 410082;2.湖南工程学院 理学院,湖南 湘潭 411104;3.湖南工程学院 电气信息学院,湖南 湘潭 411104)
针对一类MIMO不确定非线性有干扰且控制增益符号未知的系统进行跟踪控制的问题,提出了一种在线自组织模糊神经网络的改进算法,用以克服参数选择困难的问题,并基于该算法给出了一种自适应鲁棒控制方法。首先基于主导输入的概念将MIMO系统分解为多个SISO系统构成的系统,然后结合自组织模糊神经网络在线对系统中的未知函数进行逼近,对网络结构和参数实现在线调节,再利用Nussbaum函数来克服控制增益符号未知,并且引入鲁棒项及复合误差的估计来补偿复合误差。最后基于Lyapunov稳定性理论证明了整个闭环系统半全局一致最终有界。理论和仿真结果表明提出方法的有效性。
不确定MIMO系统;控制增益符号未知;自组织模糊神经网络;鲁棒控制
0 引 言
函数逼近算法在不确定系统的控制器设计中起着至关重要的作用,其中基于神经网络和模糊系统函数逼近算法得到了广泛的讨论。这些算法中大多数是事先预确定神经网络或模糊系统的结构,然后再对各个结构参数进行训练,从而最终确定出逼近系统的结构参数[1-2]。而若网络结构选择过大会加重计算负担,当网络结构选择过小则不能取得好的近似从而影响系统的控制效果。为解决这个问题,不断有学者提出了自组织调节网络和系统结构的算法[3-7],对神经网络和模糊系统的结构及相应的参数在训练的过程中同时进行调整,而不需事先确定系统的结构。这些算法大致可以分为两类[8]:一种是基于块数据算法,所有训练数据一次给定,在整个训练过程中每次训练用到多个数据,而且所有数据在每次训练时是可见的;另一种是在线序列算法,训练数据是实时产生的,训练数据是一个接一个序列进入训练系统,后续数据对当前时刻是不可见的。
现有的文献中进行模糊神经网络控制器设计时大多采用系统结构预先定义,而用在线序列自组织方法确定其结构的较少。文献[9]提出了通过计算误差矩阵结合QR分解及正交分解等计算方法来对模糊神经网络的结构进行在线调节,并应用到一类SISO非线性控制系统上,但需要保存已经输入的所有数据,随着时间的推移计算复杂度和计算负担会急剧增加。文献[10-11]提出对模糊神经网络系统结构的在线调节方法,即自组织模糊神经网络算法(SOFNN),只需要利用当前数据,计算融合强度和规则重要性指标,并与事先定义的阈值比较,从而确定是否在线增加和删除规则节点来确定模糊神经网络的结构,分别实现了一类SISO和一类MIMO非线性系统自组织自适应控制。然而这类算法需要事先选取合适的用于结构调节的参数和阈值,而获得较优的参数和阈值是一个难点,通常需要通过不断的艰苦的尝试才能得到。
多输入多输出非线性不确定系统的控制一直是控制领域的重要研究内容,未知MIMO系统的控制由于各个变量间的交叉耦合,设计控制器复杂[12-18]。已有的文献大多对未知MIMO系统控制时往往需要对大量的函数进行逼近计算及求逆运算,如文献[11]、文献[17]对系统中n2+n个未知函数都进行了逼近,这在计算时容易造成计算量过大,控制器负担过重及引起奇异等问题。文献[19-20]提出主导输入的概念将MIMO系统化为多个单输入单输出系统,大大降低控制器设计复杂度和难度。而针对控制方向未知系统的控制问题,近年来很多学者利用Nussbaum函数及其性质来进行补偿[21]。
本文在上述文献的基础上,提出一种改进的自组织模糊神经网络算法,应用于一类非线性不确定的控制增益符号未知的MIMO有干扰系统,实现自适应鲁棒控制。首先给出一种改进的自组织模糊神经网络算法,再基于主导输入的概念将MIMO系统化为多个单输入单输出系统,降低控制器设计难度;然后结合改进的自组织模糊神经网络在线对未知函数项进行在线逼近,对网络结构和参数同时在线调节,并利用Nussbaum函数来克服控制增益符号未知,并且引入鲁棒控制项及复合误差估计项来补偿复合干扰,最终实现闭环系统半全局最终一致有界。与已有的文献比较,具有以下不同和优点:1) 对一种在线自组织模糊神经网络算法进行改进,引入了最大规则数,主动限制模糊神经网络的结构,使得网络规则数不会不断增加下去,而调节的参数及阈值的选取更简单,同时对由限制网络结构而造成的逼近误差设计和引入相应补偿项,使得函数的逼近精度得到保证;2) 利用主导输入的概念和引入复合干扰项,使得最终需要用模糊神经网络来逼近的未知函数的个数大大减少 (只需要n个) ,且模糊神经网络结构比较简单,有效地降低了整个系统的复杂度和计算量。
1 问题描述及基本假设
1.1 问题描述
考虑下面一类MIMO系统
(1)

为进行控制器设计,进行如下假设:


注1上述假设说明所讨论的系统是一个包含未知函数,控制方向未知,及有界的外部干扰的MIMO系统。
系统(1)由n个子系统构成,其中第i个子系统为
(2)
每个子系统有n个输入,利用主导输入的概念,选取其中一个作为主导输入,不妨设第i个子系统主导输入取为ui(t),其他的输入项与外部干扰一起视为新的复合干扰,记为
则原系统(2)可化为
(3)
控制目标是要求设计一个控制率u(t),使得每个子系统的系统输出yi(t)跟踪到指定的期望输出yid(t),且闭环系统一致最终有界。
1.2 Nussbaum函数[21-22]
为处理控制增益符号未知,引入Nussbaum函数。


本文采用N(τ)=τ2cos(τ)。
1.3 模糊神经网络
模糊神经网络由四层构成,分别为输入层,模糊化层,规则层,输出层。分别为接收输入,计算高斯隶属值,确定模糊规则,计算输出。N规则的模糊神经网络的输出为
yo=WTΦ(x,m,σ)。
(4)

2 改进的自组织模糊神经网络算法

(5)
其中初始Ik为1,k=1,2,…,n(t)。常数τ,ρ,σi,μx,Ith,βth是调节网络结构的预定义参数及阈值。
网络结构的调节即模糊规则的增加和删除方法如下[10-11]:

计算Ik,k=1,2,…,n(t),,若IkIth成立,则删除第k个规则。此时n(t+1)=n(t)-1。
注2自组织模糊神经网络算法需要事先设置参数,这些参数的选择对模糊神经的网络结构的影响很大,μx越小βth越大会增加更多的规则,Ith,τ,ρ越大将删除更多的规则。因此不合适的参数会使网络产生过多的规则,使得结构复杂从而使得系统计算量变大,加重系统运行负担,而删除过多的规则会使得网络结构简单,对函数逼近的精确度造成影响甚至会使算法失效。而如何合适的选择参数到目前为止还没有切实可行的指导方法,通常的做法是通过不断尝试来确定较优值[10-11]。
为降低选择参数的复杂度,使得自组织模糊神经网络容易实现应用,从而进一步降低控制系统的复杂度,我们对其进行改进引入最大规则数目nmax,对规则数的上界进行限制。当对模糊规则数进行一次调节后,此时若对应的n(t+1)>nmax,则令n(t+1)=nmax。而由于限制规则数会造成函数逼近精度发生变化,我们在下一节引入包含逼近误差在内的总干扰的自适应率来进行补偿,从而使得整个控制系统的逼近精度能够达到要求。
3 控制器设计
对第i个子系统,定义系统跟踪误差为ei(t)=yid(t)-yi(t),滤波跟踪误差为
(6)
求滤波跟踪误差导数,得
(7)


(8)

(9)



为进行稳定性分析,下面将最优模糊神经网络的模糊规则节点分为两类,与当前时刻的规则节点数对应的称为激活节点,否则称为非激活节点,相对应的优化参数记为两部分
(10)

由于这些最优参数无法获得,将辨识器(9)取为
(11)

则由式(9)~式(11),函数的辨识误差可写为
(12)

(13)
其中:
hi是高阶项构成的向量。
从而将式(13)代入式(12)可得
(14)


证明:注意到Gauss函数的有界性,则有




(15)
(16)
从而有




(17)


下面设计控制器,注意到理想控制器(8)中含未知函数项1/gii,为避免出现控制器奇异问题,对其采用Nussbaum函数来进行补偿。另外由于逼近误差及复合误差干扰项会对系统的稳定性鲁棒性造成影响,为抑制其影响,有必要对其进行补偿。我们对总干扰的未知上界也进行估计,用其估计的自适应率来进行补偿。
取控制率为
(18)
(19)
(20)
(21)

取模糊神经网络自适应参数调节率为式(22)~式(24)
(22)
(23)
(24)
其中:ηi,w,ηi,m,ηi,σ,ki,w,ki,m,ki,σ,ki,E>0为常数。
注4:文献[9]中采用自组织模糊神经网络算法对每个未知函数都进行了逼近,共要用n2+n个。本文仅需要n个,大大降低了控制器设计复杂度及减少了计算量。
注5:与文献[10-11]不同,我们采用对未知上界也进行估计,用其估计的自适应率来进行补偿,以增强系统的鲁棒性。

4 稳定性分析

证明:对第i个子系统考虑如下Lyapunov函数
(25)
将式(14)代入式(7),求导有
(26)
对Vs,i求导,将式(26)代入得
(27)
由式(25)、式(27)得
(28)

利用式(21)及不等式

(29)
再利用下列不等式
(30)
(31)
(32)
(33)
则(28)式化为
(34)

Vi(t)≤ c0i+exp(-λ0it)*
(35)

(36)
5 数值仿真
为验证设计方法的有效性,考虑如下非线性系统:
(37)
y1d=0.5[sin(t)+sin(0.5t)],
y2d=sin(0.5t)+0.5sin(1.5t)。
(38)
仿真中我们用两个自组织模糊神经网络来逼近两个子系统中的两个未知函数项,相应的调节网络结构的参数值选为βth=0.5,μx=0.02,σ1=σ2=2,ρ=0.3,Ith=0.1,τ=0.01。

仿真过程中对2个网络规则数进行限制最大取值均为4。仿真结果由图1~图10给出。

图1 系统的输出y1和期望输出y1d曲线Fig.1 System output y1 the desired trajectory y1d curve

图2 系统的输出y2和期望输出y2d曲线Fig.2 Output y2 the desired trajectory y2d curve
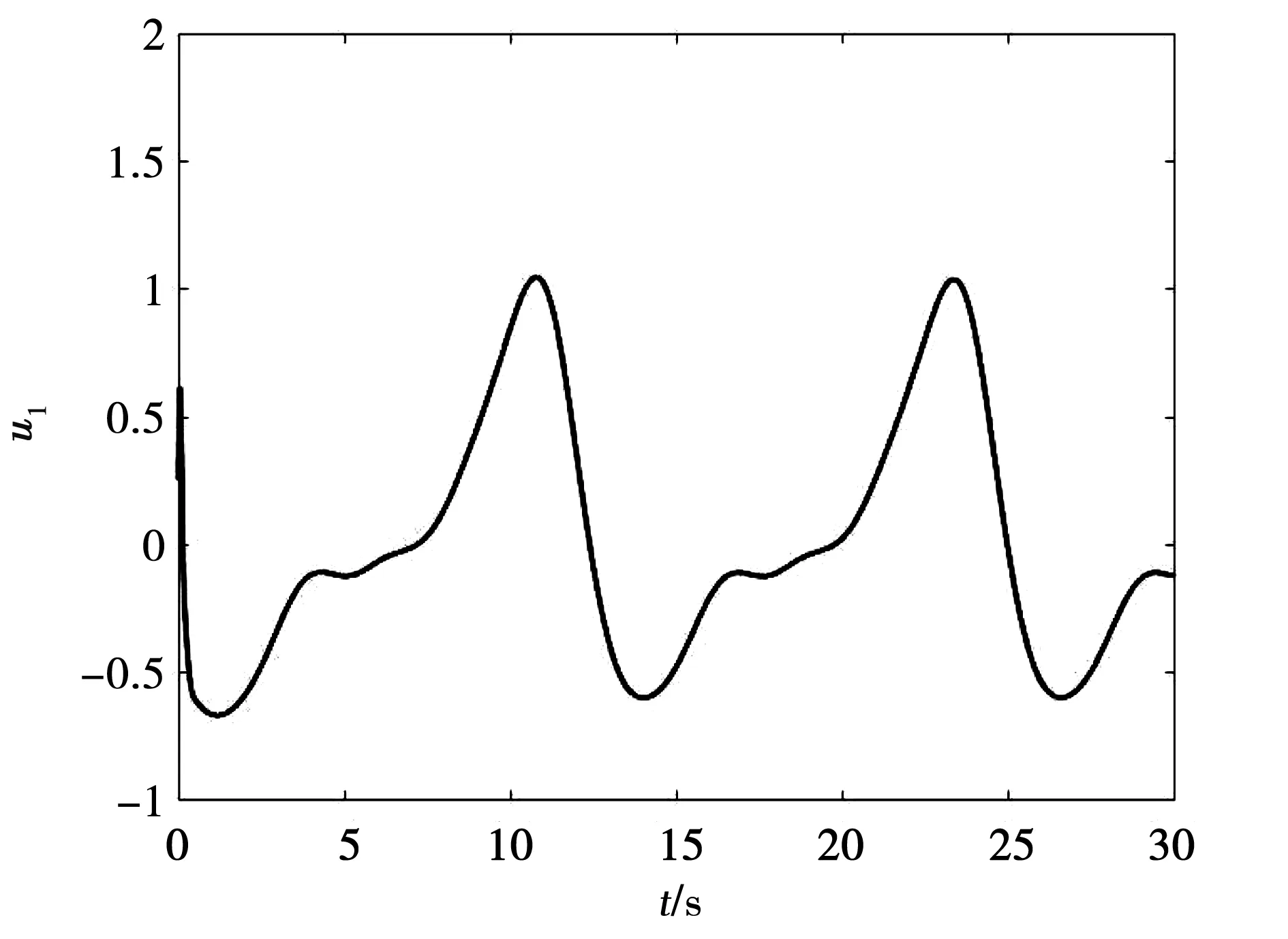
图3 系统的控制输入u1曲线Fig.3 Control input u1 curve
图1与图2给出了两个子系统的实际输出曲线及期望跟踪曲线,表明系统能很快跟踪到期望跟踪目标的一个邻域,图3~图6分别给出系统的两个输入的曲线及两个模糊神经网连接权值的范数‖W1‖,‖W2‖,图7~图8给出复合误差界估计E1,E2和τ1,τ2的曲线图,结果显示控制输入及模糊神经网络参数,复合误差界等相关变量均是有界的。

图4 系统的控制输入u2曲线Fig.4 Control input u2 curve
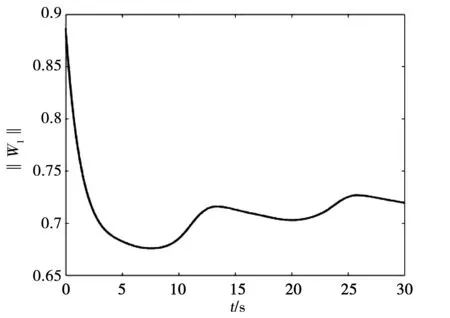
图5 第一个模糊神经网连接权值的范数Fig.5 Norm of connecting weight value of the first SOFNN

图6 第二个模糊神经网络连接权值第范数Fig.6 Norm of weight value of the second SOFNN
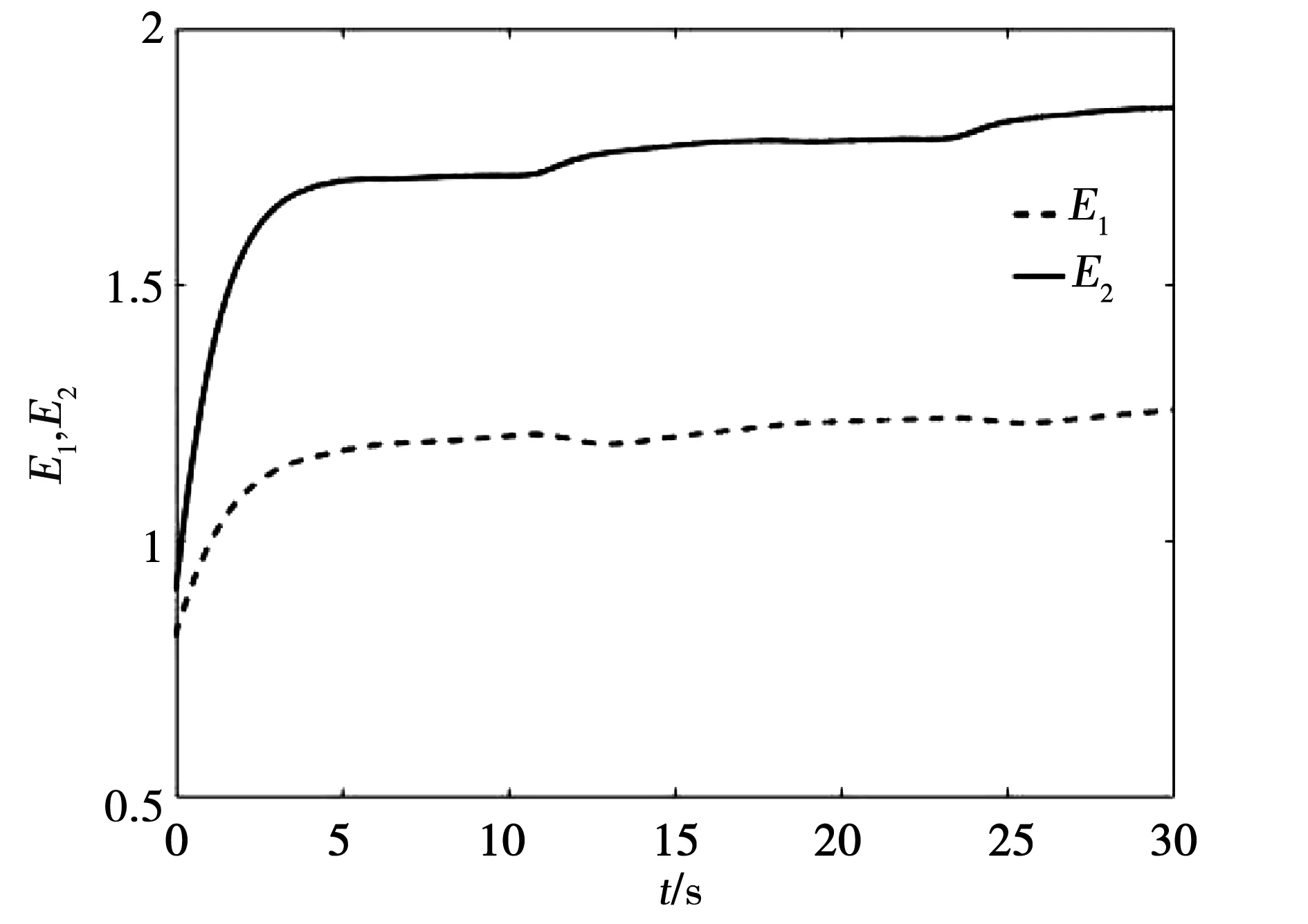
图7 两个子系统总误差界E1,E2曲线Fig.7 Error bounds of subsystems E1,E2 curve
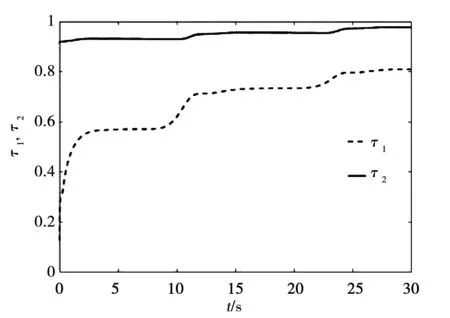
图8 参数τ1,τ2曲线Fig.8 Parameters τ1,τ2 curve
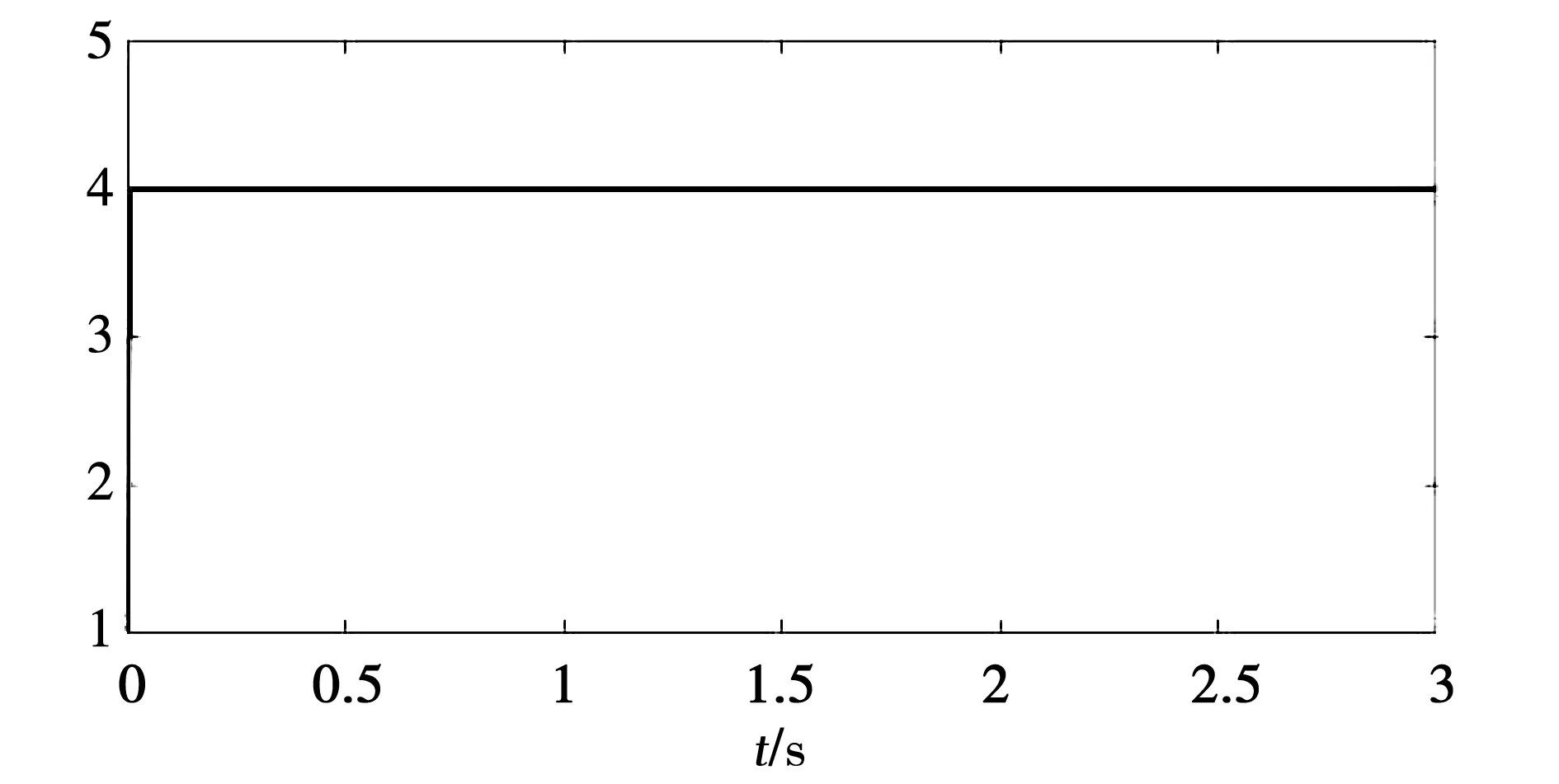
图9 第一个自组织模糊神经网络规则数Fig.9 Rule number of the first of SOFNN
图9~图10给出仿真过程中两个自组织模糊神经网络规则数随时间的变化情况。为进行比较,我们针对系统(37)采用文献[10]中的自组织模糊神经网络算法进行仿真,图11~图12给出的两个网络规则数变化情况,容易看出数值急剧变到很大,控制器计算负担过大。而本文算法得到的规则数(图9~图10)显示能快速的趋于稳定,网络结构简单计算量小,整个系统能快速跟踪到期望轨迹。所有初始值均可随机取得,其他其参数及阈值的选取不需要不断尝试来确定,减少了控制系统实现的复杂度,整个控制系统易于实现。
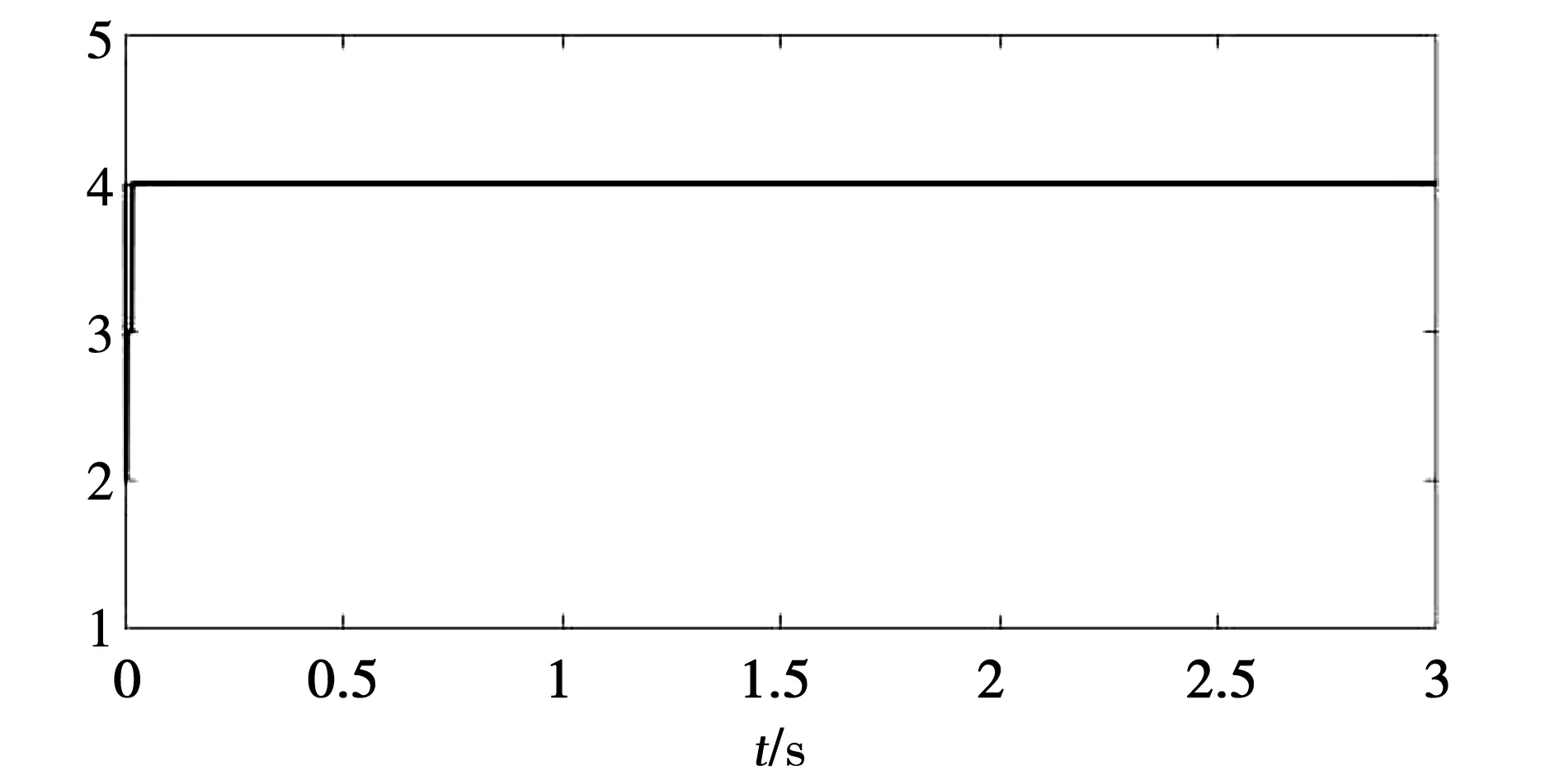
图10 第二个自组织模糊神经网络规则数Fig.10 Rule number of the second of SOFNN

图11 文献[10]的方法第一个自组织模糊神经网络规则数 Fig.11 Rule numbers of the first of SOFNN in [10]

图12 文献[10]的方法第二个自组织模糊神经网络规则数Fig.12 Rule numbers of the second of SOFNN in [10]
6 结 论
本文考虑了一类非线性控制方向未知的MIMO系统,应用改进的在线自组织模糊神经网络算法来逼近不确定函数,对网络结构和参数在线调节,网络结构调节的参数选择简单,用Nussbaum函数来补偿控制增益符号未知,用鲁棒控制项和复合误差上界的估计来补偿近似误差和干扰项,理论推导证明该算法是可行的,控制系统稳定,闭环系统各个变量有界。仿真结果表明提出的控制器能保证跟踪性能和鲁棒性。
[1] 王良勇.一类严反馈非线性系统的神经网络串级控制及应用[J].电机与控制学报,2013,(12):106-112. WANG Liangyong.Neural networks cascade control of a class of nonlinear systems with its applications [J].Electric Machines and Control,2013,(12):106-112.
[2] 王建敏,董小萌,吴云洁.高超声速飞行器RBF 神经网络滑模变结构控制[J].电机与控制学报,2016,20 (05):103-110. WANG Jianmin,DONG Xiaomeng,WU Yunjie.Hypersonic flight vehicle of sliding mode variable structure control based on RBF neural network [J].Electric Machines and Control,2016,20(05):103-110.
[3] WANG Yin,RONG Gang.A self-organizing neural-network-based fuzzy system[C]//International Conferenceon Artificial Neural Networks.IET,1997:106-110.
[4] TUNG W L,QUEK C.GenSoFNN:a generic self- organizing fuzzy neural network [J].IEEE Transactions on Neural Networks,2002,13(5): 1075-1086.
[5] JUANG C F,CHIU S H,CHANG S W.A self-organizing ts-type fuzzy network with support vector learning and its application to classification problems[J].IEEE Transactions on Fuzzy Systems,2007,15(5):998-1008.
[6] SU Jie,REN Jia,PAN Haipeng.An improved self-structuring neuro-fuzzy algorithm[C]// 2008 IEEE International Conference on Information and Automation.Zhangjiajie,Hunan,China.2008,1123-1126.
[7] LIU Fan,MENG J E.Design for self-organizing fuzzy neural network with extended kalman filter[C]//8thIEEE International Conference on Control and Automation,Xiamen,China.2010,423-427.
[8] HUANG Guangbin,SARATCHANDRAN P,SUNDARARAJAN N.An efficient sequential learning algo-rithm for growing and pruning RBF (GAP-RBF) n-etworks [J].IEEE Transactions on systems,man and cybernetics part B:cybernetics,2004,34(6):2284-2292.
[9] GAO Yang,MENG J E.Online adaptive fuzzy neural identification and control of a class of MIMO nonlinear systems[J].IEEE Transactions on Fuzzy Systems,2003,11(4):462-476.
[10] HSU C F.Self-organizing adaptive fuzzy neural control for a class of nonlinear systems[J].IEEE Transactions on Neural Networks,2007,18(4): 1232-1241.
[11] CHEN C S. Robust self-organizing neural-fuzzy control with uncertainty observer for MIMO nonlinear system[J].IEEE Transactions on Fuzzy Systems,2011,19(4): 694-706.
[12] CHANG Y C.Robust tracking control for nonlinear MIMO systems via fuzzy approaches [J].Automatic,2000,36(10):1535-1545.
[13] GE S S,WANG Cong.Adaptive neural control ofuncertain MIMO nonlinear systems [J].IEEE Transactions on Neural Networks,2004,15(3):674-692.
[14] GE S S,LI G Y,ZHANG J,LEE T H.Direct adaptive control for a class of MIMO nonlinear systemsusing neural networks[J].IEEE Transactions on Automatic Control,2004,49(11):2001-2006.
[15] LEE H.Robust adaptive fuzzy control by backstepping for a class of MIMO nonlinear systems[J].IEEE Transactions on Fuzzy Systems,2011,19(2):265-275.
[16] BOULKROUNE A,M'SAAD M,FARZA M.Adaptive fuzzy tracking control for a class of MIMO no-naffine uncertain systems [J].Neurocomputing,2012,93(2):48-55.
[17] RONG Haijun,WEI Jintao,BAI Jianming,et al.Adaptive neural control for a class of MIMO nonlinear systems with extrem-e learning machine[J].Neurocomputing,2015,149(PA):405-414.
[18] GAO Ying,TONG Shaocheng,LI Yongming.Observer based adaptive fuzzy output constrained control for MIMO nonlinear systems with unknown control directions[J].Fuzzy Sets and Systems,2015,290(C): 79-99.
[19] 刘国荣,万百五.一类非线性MIMO系统的直接自适应模糊鲁棒控制[J].控制理论与应用,2002,19(5):693-698. LIU Guorong,WAN Baiwu.Direct adaptive fuzzy robust control for a class of nonlinear MIMO systems[J].Control Theory & Applications,2002,19(5):693-698.
[20] 刘国荣,万百五.一类非线性MIMO系统的间接自适应模糊鲁棒控制[J].控制与决策,2002,17(增):676-680. LIU Guorong,WAN Baiwu.Indirect adaptive fuzzy robust control for a class of nonlinear MIMO systems[J].Control and Decision,2002,17(S):676-680.
[21] NUSSBAUM R D.Some remarks on the conjecture in parameter adaptive control[J].Systems Control Letter,1983,3(5):243-246.
[22] GE S.S,WANG Jing.Robust adaptive neural control for a class of perturbed strict feedback nonlinear systems[J]IEEE Trans.Neural Networks,2002,13(6):1409-1419.
[23] 陈谋,姜长生,吴庆宪.基于RBF神经网络的一类不确定非线性系统自适应H∞控制[J].控制理论与应用,2003,16(1):36-41. CHEN Mou,JIANG Changsheng,WU Qingxian.Adaptive H∞ control of a class of uncertain nonlinearsystems based on RBF neural networks[J].Control Theory & Applications,2003,16(1):36-41.
[24] GE S S,HONG Fan,LEE T H.Adaptive neural control of nonlinear time-delay systems with unknown virtual control coefficients[J]. IEEE Transactions on systems,man and cybernetics part B:cybernetics.2004,34(1):499-516.
(编辑:贾志超)
Control of a class of nonlinear systems based on self-organizing fuzzy neural
LI An-ping1,2, LIU Guo-rong1,3
(1.College of Electrical and Information Engineering,Hunan University,Changsha 410082,China; 2.College of Science,Hunan Institute of Engineering,Xiangtan 411104,China;3.College of Electrical and Information,Hunan Institute of Engineering,Xiangtan 411104,China)
This paper discusses the problem of tracking control a class of uncertain MIMO nonlinear system with disturbances and unknown control gain sign.An improved algorithm for online self-organizing fuzzy neural network is proposed to overcome the difficulty of choosing parameters and based on it,a robust and adaptive controller is proposed.Firstly,the MIMO system was decompounded into several SISO systems,and then the improved self-organizing adaptive fuzzy neural network was utilized to approximate the unknown function with the structure and parameters being tuned online.Then a Nussbaum function was adopted to overcome the difficulty of the unknown control gain sign,and a robust control term and an error estimation term were utilized to compensate for the errors.The closed-loop control system was proved to be semi-globally,uniformly,and ultimately bounded by Lyapunov stability theorem.Theoretical analysis and numerical simulations show the effectiveness of the developed approach.
uncertain MIMO system; unknown control gain sign; self-organizing fuzzy neural network; robust control
2014-09-30
国家自然科学基金(51177040);风力发电机组与控制湖南省重点实验室开放研究基金(XX0001);湖南省教育厅资助项目(14C0288)
李安平(1974—),男,博士研究生,讲师,研究方向为MIMO非线性系统智能控制; 刘国荣(1957—),男,教授,博士生导师,研究方向为非线性系统控制和智能控制。
李安平
10.15938/j.emc.2016.12.011
TP 273
:A
:1007-449X(2016)12-0082-10
猜你喜欢
煤气与热力(2021年12期)2022-01-19
电子制作(2019年19期)2019-11-23
电子制作(2019年24期)2019-02-23
系统工程与电子技术(2016年7期)2016-08-21
系统工程与电子技术(2016年7期)2016-08-21
重型机械(2016年1期)2016-03-01
北京信息科技大学学报(自然科学版)(2016年6期)2016-02-27
智能系统学报(2015年4期)2015-12-27
海军航空大学学报(2015年4期)2015-02-27
筑路机械与施工机械化(2014年4期)2014-03-01