
基于STC15的太阳能自动跟踪系统设计
2017-01-04 08:48高金凤
制造业自动化 2016年12期
阿 杰,高金凤
(浙江理工大学 机械与自动控制学院自动化研究所,杭州 310018)
基于STC15的太阳能自动跟踪系统设计
阿 杰,高金凤
(浙江理工大学 机械与自动控制学院自动化研究所,杭州 310018)
太阳能是一种无污染且取之不尽的清洁能源,但是它有一定的分散性、方向性和不稳定性,设计了一种能定向跟踪太阳方位的太阳能自动跟踪系统。此系统主要由STC单片机主控部分、光线检测部分和双轴机械跟踪部分三部分组成。并对系统进行了误差分析,结果表明了所设计系统的实用性,且具有稳定性好、准确度高的优势,对于提高太阳能的实际利用率有重大意义。
双轴机械跟踪; 定位系统; 太阳能
0 引言
相比于传统能源,太阳能是一种无污染、普遍存在且取之不尽、用之不竭的清洁能源,拥有非常广阔的应用前景。目前实际使用的太阳能电池板阵列大多是不能移动的,因此,太阳能资源不能得到充分利用,而且发电效率低下。在相同的太阳光照条件下,经过测定发现,采用自动跟踪系统的电池板阵列要比固定阵列的发电量高35%左右[1,2]。这表明太阳能跟踪系统可以使太阳能电池板阵列的发电效率大幅度提高。
太阳能跟踪系统在主控单元上可以分为单片机控制和可编程逻辑控制器(PLC)控制。PLC控制程序在出厂时由专业人员编写开发,技术成本比较高,不适合大批量定制生产。而单片机学习使用比较容易,一般由多个子函数模块,可以直接调用,并且单片机能够提供多种通讯接口,可以比较方便地建立通讯组网。罗维平等[4]研究了基于PLC构建的太阳能电池板自动跟踪系统,由PLC控制和监控程序以及PC监控和数据处理程序构成。高磊等[5]搭建了以单片机为核心的太阳能自动跟踪系统,分析了细分驱动和步进电机驱动对太阳能自动跟踪精度的影响。结果说明采用单片机和步进电机的设计方案较优。
1 太阳能自动跟踪系统的组成
1.1 光电检测电路部分
图1是光线检测电路装置中二极管的放置方式示意图,其包含9个二极管。正中央1个,周围8个围成一圈,检测板上覆盖有一个不透明的圆柱体。图2为光电检测电路的信号处理单元电路,两个光电二级管分别接到一个传感器的输入端,当光电二极管没有受到光照时,运放输出的低电平会通过电路传到传感器的输入端。而当阳光辐射到光电二极管时,光敏电阻的阻值减小,lkΩ可变电阻的压降随之增大[6],最终产生与太阳光辐射强度有直接关系的电压信号。把传感器输出端与单片机进行连接,单片机进行比较运算[7],最后输出正确的信号驱动双轴机械定位跟踪定位部分的步进电机。
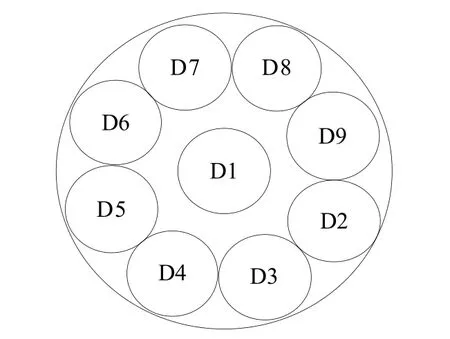
图1 光电检测电路俯视图
1.2 双轴机械跟踪定位部分
双轴机械跟踪定位部分主要是由两转动轴、绝对值伺服电机、电池板支架和底座构成。太阳能自动跟踪系统可同时在高度角和方位角两个方向上进行跟踪。在机械装置的帮助下,电池板可以在垂直方向上0~90°和水平方向上360°之间自由旋转。2个转动轴的转动部位都安装有滚珠轴承。在转动轴的齿轮上分别安装2块小磁铁和干簧管,并调整其位置使小齿轮上的磁铁干簧管时能够闭合,由单片机判断此信号从而确定转动的角度和位置[8~10]。单片机发出方位角和高度角电机的正反转控制信号,分别加在两个方位的电机上,从而构成实时跟踪系统。
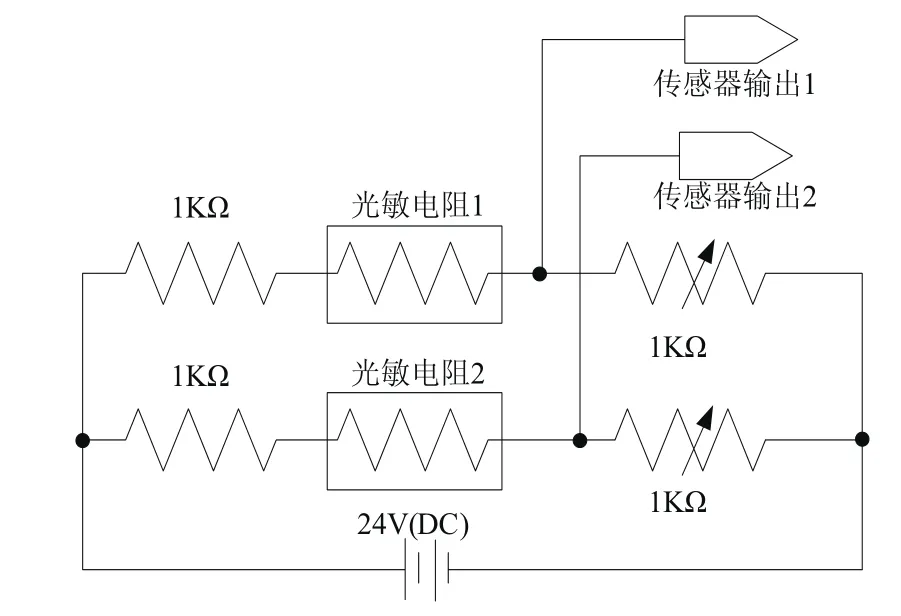
图2 信号处理单元电路
1.3 时钟电路部分
时钟电路采用DALLAS串行实时时钟芯片DS1302,如图3所示。它通过串行通讯的方式与单片机进行连接。将DS1302的I/O、SCLK、RST三根引脚分别与单片机AT89C52的三根输入口相连接即可。DS1302主要引脚有:X1,X2,连接32.768kHz晶振。其中GND连接电源地。I/O口是数据输入、输出引脚。SCLK是串行时钟输入引脚。VCC1、VCC2是主电源与后备电源引脚。
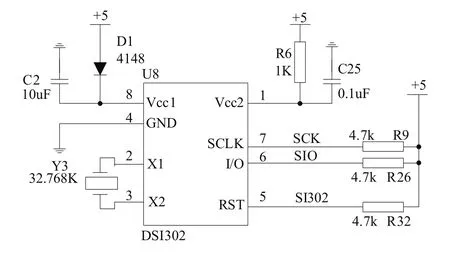
图3 DS1302时钟电路图
1.4 单片机控制部分
单片机采用STC15单片机,图4为IAP15F2K61S2封装脚位图。其处理速度快,响应及时,一条指令耗时1个时钟周期,有高速、高可靠的特性,并且内部具有高精度R/C时钟和8路10位高速A/D转换,不需要外部另加昂贵的晶振,节约了成本,在系统和应用里都能自由编程。
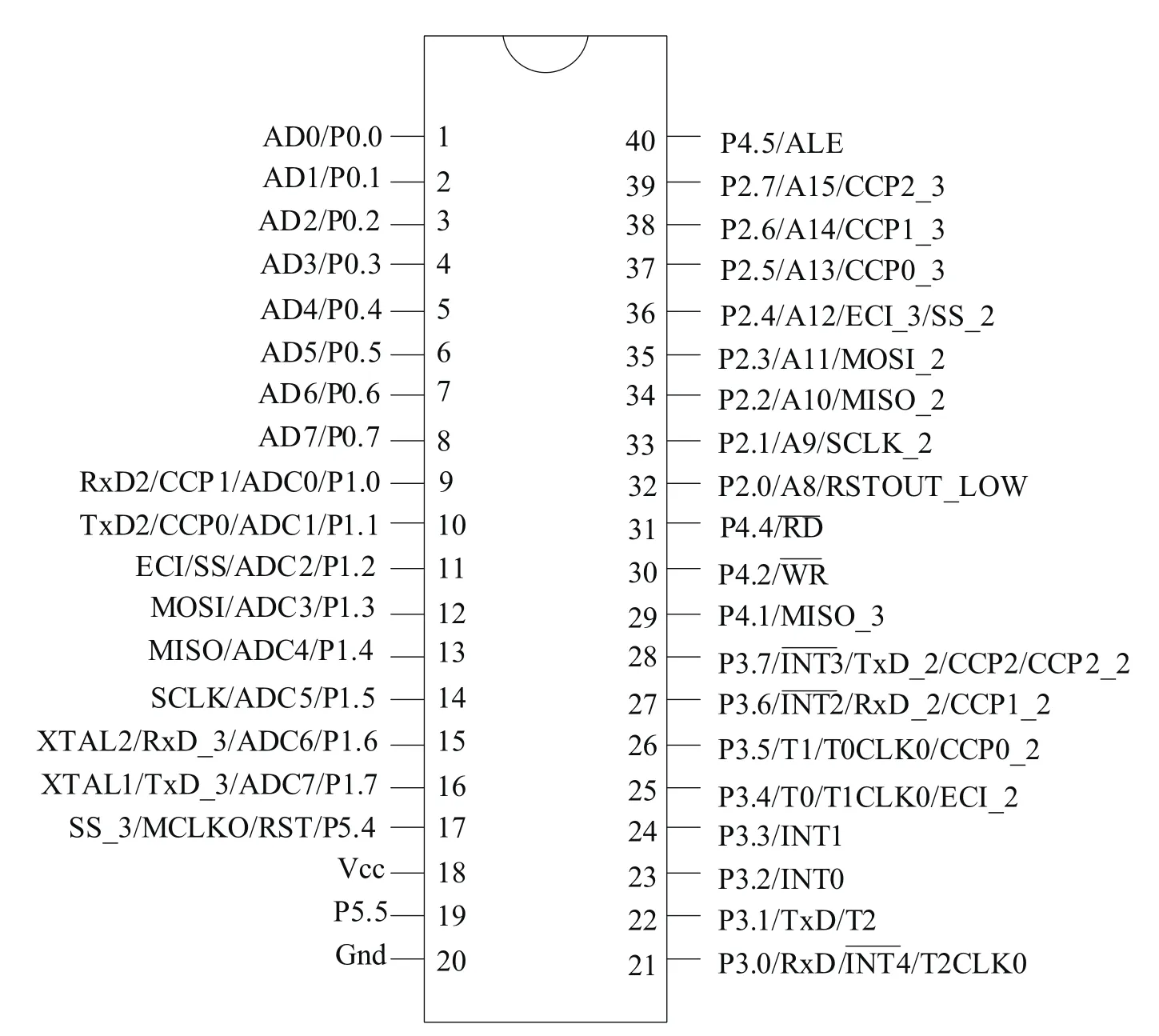
图4 IAP15F2K61S2封装脚位图
2 太阳能自动跟踪系统的设计
2.1 硬件设计
为了提高太阳能电池板的利用率,通常要求从高度角和方位角两个方向上跟踪太阳,以确保太阳光能实时垂直地照射在电池板[10]。
太阳能高度角α计算方式如下:

太阳能方位角γ计算方式如下:

式(1)、式(2)中,φ代表当地纬度,δ代表太阳赤纬角,ω代表太阳时角。

式(3)中,n是积日,一月一日为1,一月二日为2,依此类推。且:

式(4)中,t(小时)是一天当中的时刻。
根据式(1)~式(4)[11,12]计算出太阳高度角和方位角,再通过对两个角度进行双轴跟踪,即可实现太阳自动跟踪。
开机首先进行时间校正。若第一次调整时遇到的是阴天,可用手电筒模拟太阳进行定位。有了初始数据后,程序就可自动调整。高度角和方位角合用二个字节,并且将时间的分和时组成一个字节,把这三个字节存储到STC15指定的RAM中。如果阴天,则直接调用上次在同一时间的位置。由微机采集固定光强、跟踪光强和电瓶温度等数据,并对蓄电池放电和充电进行分级控制。
硬件连接如图5所示。
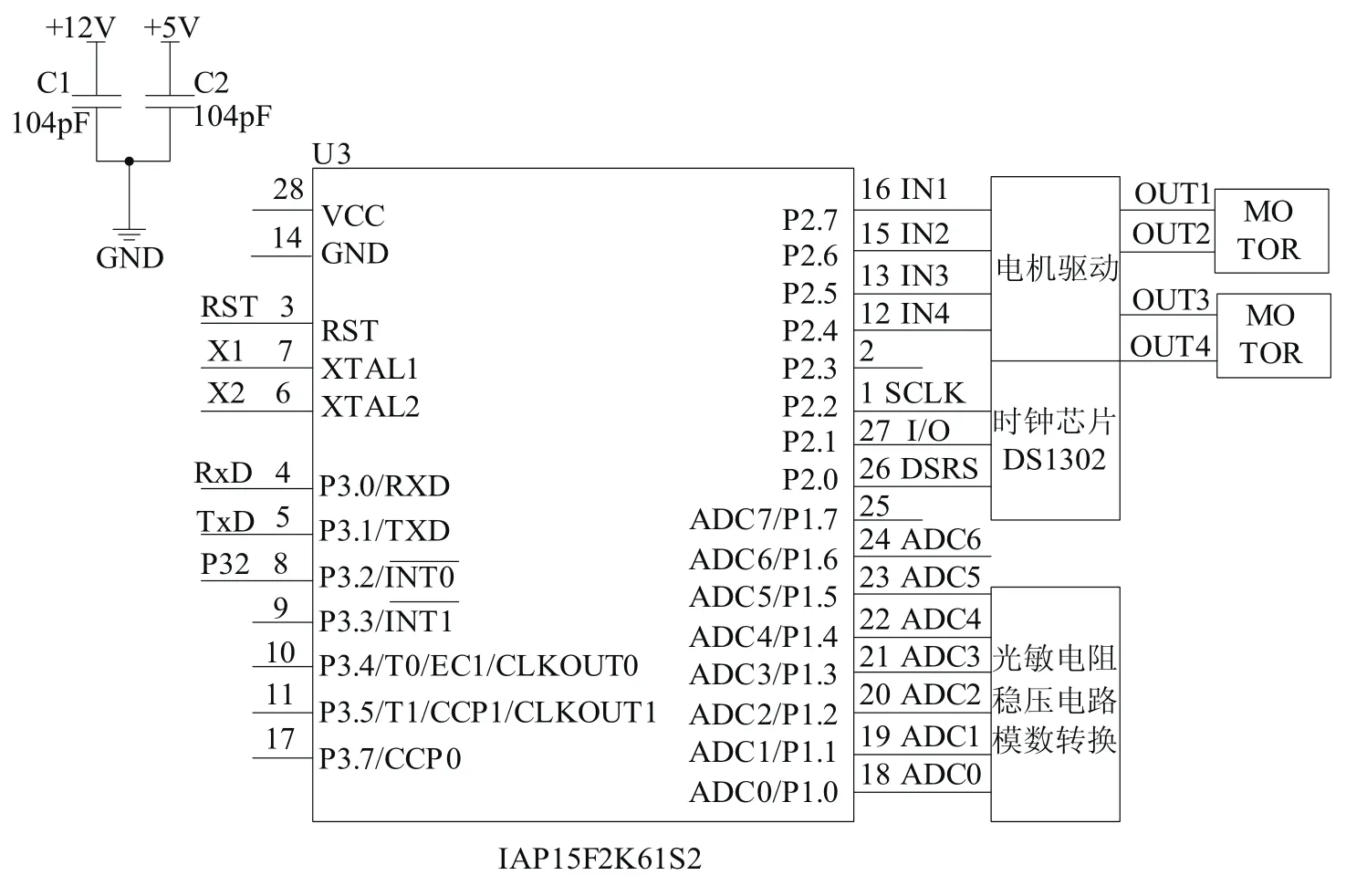
图5 硬件连接图
2.2 软件设计
如图6所示。系统首次安装使用时会读取时钟芯片的初始化设置。步进电机在单片机的控制下反向转动,直至碰触限位开关后停止转动,此位置的太阳能电池板的高度角和方位角均是确定的。
然后软件将时钟提供的日出日落时间和单片机储存的日出日落时间进行比较,如果是日出后日落前,传感器电路由光照强度判断是否为晴天,如果是晴天,进行时钟跟踪,也就是把单片机里存储的太阳角度数据与实际的高度角和方位角进行对比,计算出数据差值,然后将其转化成脉冲数据,从而控制步进电机转过相应的角度,再通过传感器电路检测阳光是否垂直照射电池板,若没有,则把信号重新发送给单片机,在其二次处理下再次驱动步进电机转动,直至太阳光垂直照射电池板;若为阴天,则只需进行时钟跟踪即可。
3 太阳能自动跟踪系统误差分析
传动部分是太阳能自动跟踪系统的误差主要来源。传动部分是整个系统的执行单元,主要作用是将接收到的来自控制部分的输出信号转换成机械运动,从而使得太阳能电池板垂直跟踪太阳。本文采用步进电机带动蜗轮蜗杆传动,蜗轮与蜗杆之间的传动存在有很多不可避免的误差,例如蜗轮、蜗杆本身的制造误差,由于磨损产生的误差和中心距误差等,由于磨损而产生的误差主要由传动机构的载荷大小以及润滑情况决定。对系统传动精度有较大影响的误差是齿轮中心距误差,但是中心距误差在系统装配过程中不可避免,所以,只能尽量减小其对精度的影响。
控制系统误差包含两个部分:软件系统误差和硬件系统误差。该部分精度一般都很高,不存在大的优化空间。此外,还包括安装连接带来的误差、工作平台本身的误差和密封润滑造成的误差等。
4 结束语
本文设计了一种能定向跟踪太阳方位的太阳能自动跟踪系统。此系统主要由STC单片机主控部分、光线检测部分和双轴机械跟踪部分三部分组成。所设计的系统具有结果简单、成本低廉、稳定性好的优势。此外,还对太阳能自动跟踪系统进行了误差分析。结果表明,所设计的系统能最大面积地吸收太阳光能,从而大幅度提高太阳能电池板阵列的发电效率,提高太阳能的实际利用率。
【】【】
The design of the solar automatic tracking system based on STC15
A Jie, GAO Jin-feng
TH112.1
A
1009-0134(2016)12-0101-03
2016-08-02
浙江省科技厅项目(2014C31082);国家自然科学基金(61374083)
阿杰(1991 -),男,也门,硕士研究生,主要从事太阳能自动跟踪系统方面的研究。
猜你喜欢
结构工程师(2022年2期)2022-07-15
铝加工(2021年5期)2021-12-02
军事文摘(2021年18期)2021-12-02
数学小灵通·3-4年级(2021年9期)2021-10-12
小学生学习指导(低年级)(2020年10期)2020-11-09
空间科学学报(2020年4期)2020-04-22
现代计算机(2018年19期)2018-08-01
电子制作(2018年12期)2018-08-01
知识就是力量(2017年12期)2018-01-15
中学生数理化·七年级数学人教版(2017年1期)2017-03-25
