浅谈北斗导航拖拉机自动驾驶系统在142 团的应用
2016-12-29 09:21:38蒋腾生产建设兵团第八师142团农业科新疆石河子832000
新疆农机化 2016年4期
蒋腾(生产建设兵团第八师142团农业科,新疆 石河子 832000)
浅谈北斗导航拖拉机自动驾驶系统在142 团的应用
蒋腾
(生产建设兵团第八师142团农业科,新疆 石河子 832000)
文中介绍了北斗导航自动驾驶系统的主要组件。同时对国内外几种比较典型的导航系统在田间播种作业时的接行端直、接行准确度进行了抽样检测。针对北斗导航自动导航驾驶系统使用中存在的问题提出了几点改进建议。
导航系统;自动驾驶;检测;应用
0 引言
2016年,新疆第八师142团本着“立足农机、发展农业”的原则。不断提高农机科技含量,加快精准农业的推广应用,为约翰迪尔854、约翰迪尔954、福田欧豹904等大中轮式型拖拉机安装了北斗导航自动导航驾驶系统。142团场一共装了103台北斗导航自动驾驶系统,其中上海联适88台,上海华测6台,美国约翰迪尔6台,北京和众思壮3台。使用北斗导航装置棉花铺膜播种作业面积1.07万hm2;青贮玉米播种作业面积:164 hm2。
1 导航的主要组件
该系统主要有卫星接收天线、车载接收机、控制器、液压阀、角度传感器以及车载终端等。
(1)卫星接收天线:卫星接收北斗信号兼容GPS、伽利略等卫星信号,结构坚固,防水、防尘,性能好。具有较强的抗振性,同时具有耐高低温等特点。
(2)车载接收机:车载接收机是北斗高精度定位设备,接收北斗卫星信号,并通过电台或者网络等通讯方式获取基站差分数据,从而输出高精度坐标、航向、速度等定位信息。
(3)控制器:根据北斗高精度接收机与角度传感器的实时信息以及车辆在规划路线上所处的状态进行实时的闭环计算并实时向液压阀发送指令,使车辆始终准确的保持沿预定航线行驶。
(4)液压阀:液压阀是系统的液压控制系统,其主要以液压油为工作介质,进行能量转换、传递和控制。采用合金材质,体积小巧,安装方便,可靠性高,动作灵活,自动转向控制的更为准确和及时。工作时冲击和振动小,噪声小,比方向盘模式控制精度高,反应快等特点。
(5)角度传感器:实时感应车辆转向角度并向控制器发送高精度转向信息。
2 北斗导航自动驾驶系统的特点及优势
(1)可以24小时全天候不间断作业,提高机车作业面积,无论日夜不受天气因素干扰都可以保证高精度作业。
(2)采用我国自主知识产权的北斗高精度定位系统。作业1 000m误差在2.5 cm以内,减少作业中的重复面积,并能自动计算面积
(3)北斗导航与自动驾驶系统可极大减轻驾驶员的劳动强度,解放了驾驶员的双手和眼睛,作业时有更多的精力与时间关注机车和农具的运行情况,更好地保证农机具的正常作业。减少驾驶员的工资支出,降低拖拉机车主的成本。
(4)可有效提高土地中的阳光和水分的利用率。使每棵植株均匀的分布,享有同等空间的阳光和水分,减少弱势植株的比例。
3 实际作业情况
上海联适北斗导航自动驾驶系统在第八师142团设立了7个基站,基站设备要求24小时全天候不间断工作,单个基站的覆盖最大半径可达15 km,可以完全覆盖整个团场的全部农田,满足拖拉机驾驶员在田间作业的需求。同时驾驶员在不同的连队作业时,可以切换到最近的基站来加强信号。
3.1检测棉花播种端直和接行准确
我们针对棉花播种作业时的播行端直、接行准确进行了抽样检测。测量的方法是每个条田已播棉田两头进地20m处各选一个点,条田最中间选一个点,测量三个连接行的宽度,并且让正在播种的拖拉机停车20分钟,记录北斗导航自动驾驶设备重新启动的过程所需时间,观察在起步行驶时是否有弯曲。检测中我们遇到一些突发情况如基站断电,而导致北斗导航自动驾驶系统无法使用。再次启动接收信号连接的时间较长,且在启动行驶的100 m内出现弯曲,所以在检测过程中,我们着重对停车20分钟,关闭导航设备再重新启动进行测量。上海华测导航设备启动需15分钟且起步时需手动扶方向盘且接行处有5 cm的小弯(春播过后,上海华测公司进行了双天线的改造,目前已经达到技术要求。);美国约翰迪尔导航设备启动需2分钟且起步时不需要手扶,接行处没有无小弯;上海联适导航设备启动需2分钟且起步时不需要手扶,接行处没有无小弯;北京合众思壮导航设备启动需2分钟且起步时不需要手扶,接行处没有小弯。
3.2接行偏差距离检测
我们分别在142团的10连、15连、19连、23连、25连、26连以及30连,现场对春播作业拖拉机进行抽样检测(要求接行的标准距离为66 cm)。每个品牌北斗导航自动驾驶系统抽三辆拖拉机,测绘完成后进行了接行距离的统计,结果如表1。通过检测找出北斗导航设备在播种作业时接行不准确的原因。(1)安装北斗导航自动驾驶系统的四驱拖拉机(例如约翰迪尔854、约翰迪尔904等。)明显要比二驱拖拉机(例如约翰迪尔850、福田900等。)在作业时接行更加准确。(2)不同的品牌其自身的系统配置以及传感器所能达到的精准度不同所以导致接行的上下偏差也各不相同。深松作业后的条田,拖拉机播种作业误差较大。
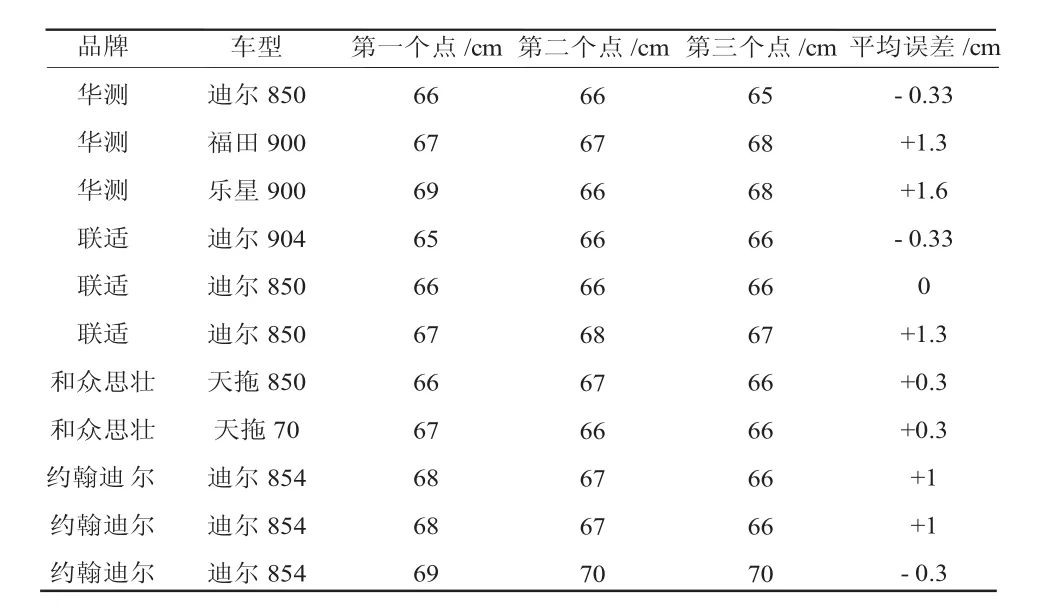
表1 北斗导航在棉花播种作业中接行偏差距离的测量
4 安装北斗导航自动驾驶系统的一点经验
(1)对安装导航的拖拉机在不带农具的情况下进行1 000 m测验,在1 000 m内设三个点进行往返几次行走,观察三个点上的误差。调整误差到最小间距,达到北斗导航自动驾驶系统的规定范围内。这样做的好处是:拖拉机调整到位,连接农机具后误差较大时,我们只需调整农机具,不用再考虑拖拉机的偏正问题。在调整拖拉机的同时对驾驶操作人员进行北斗导航自动驾驶系统的实际操作培训,为今后驾驶操作人员作业打下了良好的基础。
(2)将拖拉机悬挂上播种机后,在1 000 m内设三个点,操作方法同上。通过以上反复调试,驾驶操作人员在下地前,基本可以掌握北斗导航自动驾系统。
5 几点改进建议
(1)加强北斗导航自动驾驶的售后服务,每年不少于两次以上实际操作培训,让每个用户能够熟练的掌握好,使用好北斗导航自动驾驶系统。
(2)视频字目太小,驾驶操作人员看不清A-B线符号,建议放大视频字目。
(3)信号有不稳定的现象,特别是地势较低和地边树木较多时信号较差,有时信号丢失,播行连续碎弯较多,前轮摆动频繁,建议加高基站。
(4)北斗导航操作系统有待改进,缺少汉语拼音书写功能,面积数不能存储累计。在当前工作地块可以看到面积,重启或者转地在建AB线后,原地块面积消失,给驾驶员带来不便。
(5)机车停车熄火断开所有设备在20分钟后重新启动时,不能正常导航的、播行出现弯曲的,建议厂家更换设备。
(6)安装了北斗导航设备拖拉机提高了驾驶员的舒适性,但降低了驾驶员的警惕性,有打盹的现象。建议安装距地头30m处报警装置,起到提醒驾驶员的作用。
(7)每设AB线时,拖拉机要空跑一趟,增加了油耗。土地经过两次碾压车辙印较深,造成土地压实,影响作物生长,建议研发一种手持式光感定点设备。
Brief dicussion of application of“Big Dipper”tractor automatic driving navigation system at 142th regiment
JIANG Teng
(Agricultural department of 142 regiment,8th division,Xinjiang production and construction corps,Shihezi832000,Xinjiang,China)
This text introduces the main parts of“Big Dipper”navigation automatic driving system.We carry out sampling in spection for accuracy among several typical navigation system at home and aboard,and rise several improvment suggestions aim at the problems that exist in use of“Big Dipper”tractor automatic driving navigation system.
Navigation system;Automatic driving;Inspection;Application
1007-7782(2016)04-0020-03
10.13620/j.cnki.issn1007-7782.2016.04.008
S219.1
B
2016-07-19
猜你喜欢
军事文摘(2023年20期)2023-10-31 08:42:08
农机质量与监督(2022年9期)2022-11-19 06:18:39
农机科技推广(2022年9期)2022-10-11 08:35:06
小哥白尼(神奇星球)(2022年3期)2022-06-06 07:40:04
农机质量与监督(2022年11期)2022-03-14 21:38:02
小学生学习指导(小军迷联盟)(2021年11期)2022-01-18 05:14:00
当代陕西(2019年18期)2019-10-17 01:48:50
小学生导刊(2017年15期)2017-05-17 05:44:08
小布老虎(2016年12期)2016-12-01 05:47:00
太空探索(2016年3期)2016-07-12 09:58:47