
车载移动测量系统精度影响因素分析研究
2016-12-26 11:58万宏德
地理空间信息 2016年4期
林 昀,廖 佳,万宏德
(1.宁波市测绘设计研究院,浙江 宁波 315042)
车载移动测量系统精度影响因素分析研究
林 昀1,廖 佳1,万宏德1
(1.宁波市测绘设计研究院,浙江 宁波 315042)

以宁波市测绘设计研究院的车载激光扫描与全景成像城市测量系统为例,在速度、激光入射角和GPS信号失锁等不同外部条件影响下,获取了大量实验数据。综合分析评价了车载移动测量系统的数学精度变化情况,为移动测量系统在各种城市测量环境中的适用性提供参考依据,以期扩大该技术在测绘领域的应用。
车载移动测量系统;数学精度;激光扫描仪;POS系统
随着信息社会的深入发展,信息技术、空间技术已经成为城市发展变革的驱动力,城市空间信息的快速获取和智能化处理是当前测绘领域的研究热点,也是“智慧城市”亟待解决的问题。因此,高效率移动测量方式必然成为城市空间数据获取的重要手段[1]。
与此同时,车载移动测量作为目前新兴的测绘手段,工程实践应用资料相对较为匮乏。由于城市测量环境较为复杂,对其精度的影响情况尚没有准确的数据支撑,一定程度上制约了车载系统的进一步应用。因此,对车载系统的测量精度展开研究,明确其在城市不同测量环境中的精度变化情况,是目前车载系统发展亟需解决的问题[2,3]。
1 车载系统简介及影响因素分析
1.1 车载系统的组成
车载系统一般以汽车为移动平台,主要由激光扫描数据采集系统、POS系统(GPS+IMU)、高分辨率全景成像系统、同步控制单元组成,可以实时完成车辆载体的GPS定位、姿态解算、城市三维空间信息的激光点云数据及全景影像数据的采集。本文的移动测量系统如图1所示[3]。

图1 车载移动测量系统
1)激光扫描数据采集系统:本研究的车载系统搭载了2台激光扫描仪,RIEGL VZ-400固定在测量车的右后侧,能够高效率地获取两侧的激光点云数据,LMS-Q120i则主要用于获取后方地表面点云。
2)POS系统:POS系统主要用于测量扫描投影中心的空间位置和测量装置的空间姿态,其主要部分为GPS与IMU 2个部分,同时辅以车轮编码器(ODO)。
3)全景影像采集系统:本研究的车载系统采用全景相机获取真实场景纹理信息,并通过全景影像与车载点云的高精度配准,实现全景影像的可量测。
4)集成同步控制系统:集成控制系统利用计算机时钟和GPS时钟获取时间基准,控制全景成像系统和激光扫描系统的数据采集,保证异源数据的时间基准统一,从而使激光雷达系统和全景成像系统下的相对测量结果转换到绝对测量坐标系中。
1.2 影响因素分析
车载系统的精度主要由内部的系统性误差和外界测量环境2个部分决定[2]。系统本身的误差来源主要有POS定姿定位误差、激光测距误差和系统集成误差等。通过使用高精度的GPS和IMU、激光扫描仪和系统同步器等设备,进行更高精度的系统标定,可以减少系统内部因素误差对数学精度的影响。因此,这方面的因素从系统设计和投入使用时就是可控的和可预计的。
外界测量环境对数学精度的影响更为复杂,尤其是城市测量时,通常涉及多种因素的共同作用,使得无法通过理论模型对数学精度进行估算,因而只能通过实验的方式,利用测量的数据对系统进行总体综合评价[3,4]。
本文主要从目前车载系统的生产实践入手,针对不同传感器的外部影响条件,分别进行单一影响因素实验,计算检核点平面位置和高程中误差,并对实验数据进行分析评价,以便指导车载系统的推广应用。实验主要由3个方面组成:①在不同速度下的数学精度变化。②在不同激光入射角下的数学精度变化。③ 在GPS失锁累积时间下的数学精度变化。
2 车载系统精度分析实验及评价
2.1 实验区
本研究以宁波市国家贸易展览中心及其周边区域为实验场地。该区域较为空旷,GPS信号接收条件良好。作为测量对象的建筑物,高度合理,结构具有一定的复杂性,既能保证激光点云中检核点的获取,又能保证检核点的空间分布特点[2-4]。
实验开始前,以利用静态GPS测量和高精度全站仪布设附合导线网的方式获取控制点的平面坐标,利用水准仪布设四等水准网的方式获取控制点的高程值,再利用全站仪获取各个不同平面和高度上角点的空间坐标,保证坐标检核点的平面位置和高程中误差在1 cm以下[3]。
2.2 实验和数据结果
1)速度影响因素。本次实验中,车载系统的激光扫描仪以前进方向的正右方测量平行墙体,以10 km/h的速度进行测量,每次测量速度递增10 km/h,最高为50 km/h,共沿相同路径测量5次。
计算不同速度下车载系统对检核点坐标的测量值与真实值的较差,从而计算中误差,结果如表1。
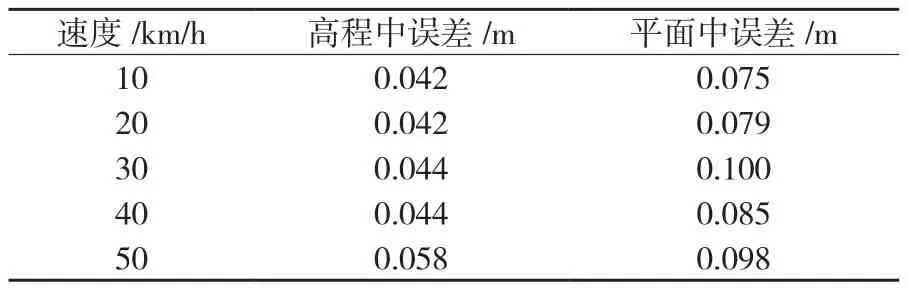
表1 不同速度条件下的中误差
2)激光入射角影响因素。本次实验中,车载系统以30 km/h的速度匀速前进测量平行墙体,激光入射角分别为0°、15°、30°、45°,共沿相同路径测量4次。
计算不同入射角条件下车载系统对检核点坐标的测量值与真实值的较差,从而计算中误差,结果如表2。
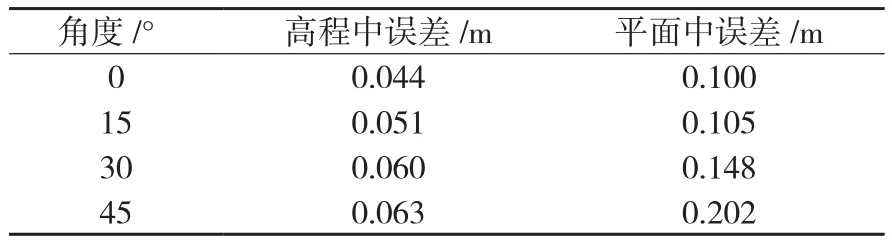
表2 不同入射角条件下的中误差
3)GPS失锁累积时间影响因素。本次实验中,车载系统的激光扫描仪以前进方向的正右方测量平行墙体,以30 km/h的速度匀速前进。从遮蔽GPS信号接收线开始计时,并记录在不同的信号失锁时刻车载系统获取的检核点,待测量结束后恢复GPS信号接收,并在信号接收条件良好的区域静止2 min,再次重复测量路径。计算各时间点车载系统对检核点坐标的测量值与真实值的较差,结果如表3。
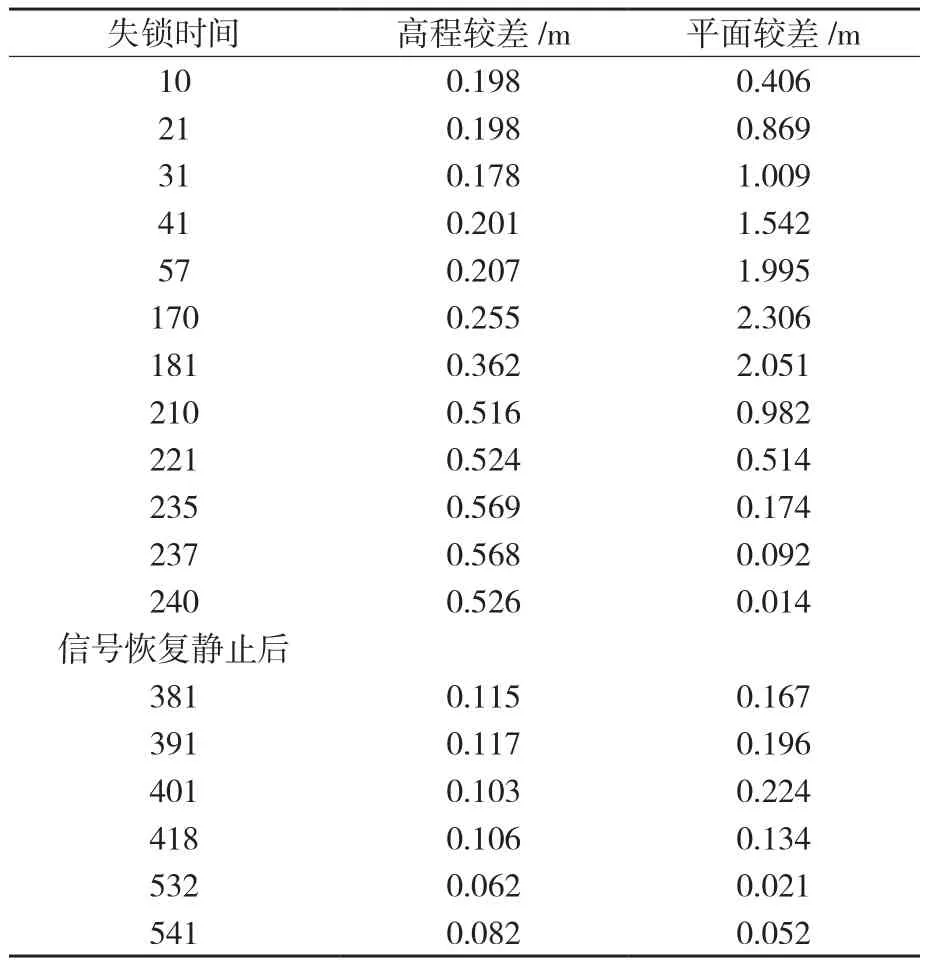
表3 GPS失锁累积时间及恢复后的较差
3 实验数据分析评价
1)速度影响因素。实验结果表明,车载系统测量精度对速度的变化不敏感,高程和平面位置精度基本不发生变化(见图2、3),说明在车辆一般行进速度范围内,对精度影响程度较小。作业时应可提高车辆行驶速度,以提高作业效率。
2)激光入射角影响因素。实验结果表明,测量精度随激光入射角的增大而逐渐降低。因此作业时,应根据待测目标位置设定不同的扫描角度,激光应尽量垂直入射测量对象,以获取精度较高的点云数据。
3)GPS失锁累积时间影响因素。实验结果表明,车载系统测量精度受GPS信号的影响较大,其精度与失锁时间和软件解算方式有较大关系,失锁后高程较差变化较缓慢,平面位置精度下降很快。采用双向积分紧耦合解算时,信号良好时段的GPS数据对失锁时的定位精度有一定的改善,特别是失锁后期的数据改善较为明显。如采用松耦合解算,则会导致整体精度的严重下降。而高程对双向积分解算修正的效果不明显,平面位置对修正的效果则相对较好。
结果同时表明,虽然IMU可以在GPS失锁条件下进行辅助定位,但由于其误差随时间累积变大较明显,不宜长时间独立进行数据采集。在城市测量环境中,GPS信号失锁或较差的情况下,应尽快恢复观测条件,缩短GPS失锁的时间。在GPS信号恢复后应将车载系统静止在GPS信号良好的区域一段时间后,再次开始 数据的采集,以便进行补偿。
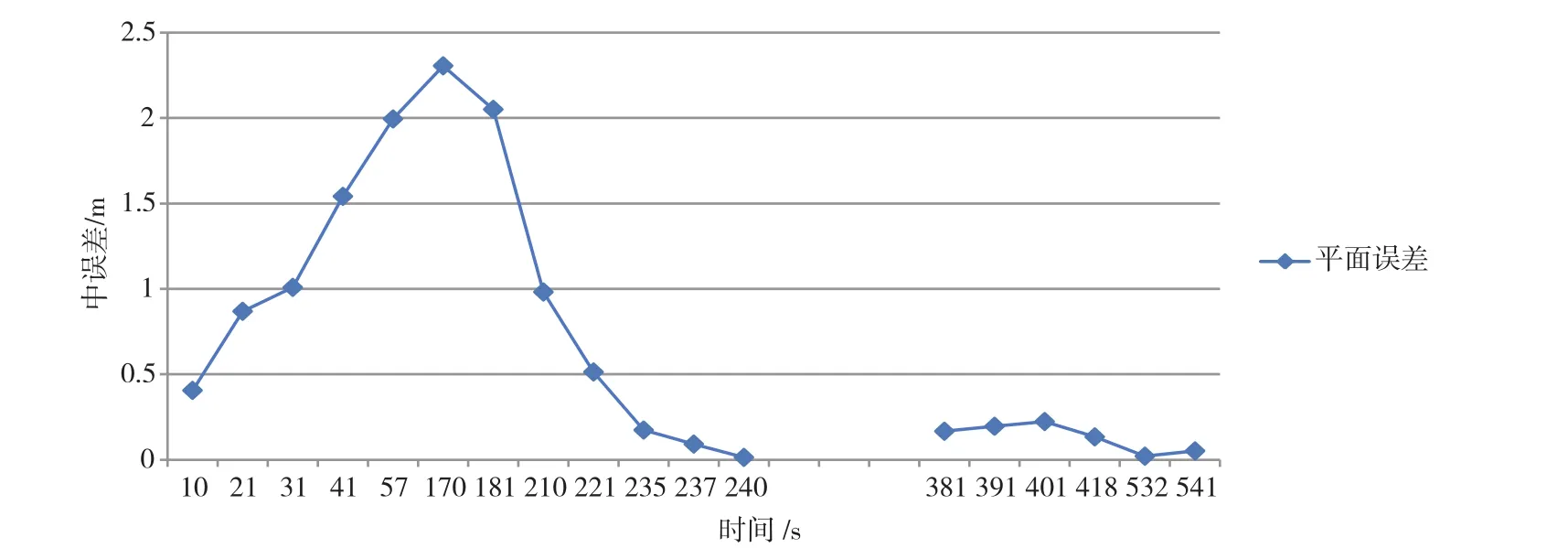
图2 平面位置较差随失锁时间累积和信号恢复后的变化曲线
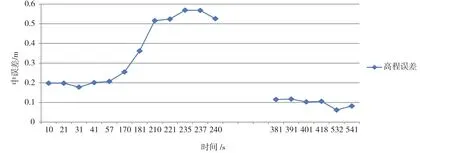
图3 高程较差随失锁时间积累和信号恢复后的变化曲线
4 结 语
通过对工程实践经验的总结和精度实验数据的分析,对系统的数学精度情况进行定量分析,为如何提高车载系统测量精度提供了数据参考,也为车载系统在城市测量领域的深化应用提供了生产指导。为提高系统精度,下一步应将改进的重点放在POS系统的升级改造上。
[1] 聂倩,陈为民,陈长军.车载三维激光扫描系统的外参数标定研究[J].测绘通报,2013(11):74-77
[2] 张毅.地面三维激光扫描点云数据处理方法研究[D].武汉:武汉大学,2008
[3] 陈为民.基于全景成像与激光扫描的城市快速三维测量与重建技术研究[D].武汉:武汉大学,2012
[4] 陈为民,聂倩,林昀.基于罗德里格矩阵的车载激光点云与全景影像配准研究[J].测绘通报2013(11):21-24
[5] 张卡,盛业华,叶春,等.车载三维数据采集系统的绝对标定及精度分析[J].武汉大学学报:信息科学版,2008,33(1):55-59 [6] 李德仁.移动测量技术及其应用[J].地理空间信息,2006,4(4):1-5
[7] 王万峰.MMS综合测量精度分析与应用研究[D].北京:北京建筑工程学院,2009
[8] 黄先锋,李卉,江万寿,等.机载激光扫描数据误差分析与精度改善研究进展[J].遥感信息,2007(3):91-95
[9] 刘宁.车载LiDAR航迹解算精度提高方法研究[D].焦作:河南理工大学,2011
P246
B
1672-4623(2016)04-0024-03
10.3969/j.issn.1672-4623.2016.04.008
林昀,硕士,工程师,主要从事摄影测量与遥感、机载激光雷达、车载移动测量系统和地理国情普查等工作。
2014-07-10。
猜你喜欢
汽车实用技术(2022年10期)2022-06-09
全球定位系统(2021年3期)2021-08-07
家庭影院技术(2020年11期)2020-12-28
装饰装修天地(2020年7期)2020-06-01
铁道通信信号(2020年8期)2020-02-06
汽车维修与保养(2019年3期)2019-06-19
英美文学研究论丛(2018年1期)2018-08-16
中国公共安全(2017年11期)2017-02-06
家庭影院技术(2017年12期)2017-02-06
特别文摘(2016年21期)2016-12-05
