
Neal-Smith准则改进分析
2016-12-21 02:24王伟志
飞行力学 2016年6期
王伟志
(中航通飞研究院有限公司 第四研究室, 广东 珠海 519000)
Neal-Smith准则改进分析
王伟志
(中航通飞研究院有限公司 第四研究室, 广东 珠海 519000)
驾驶员在环振荡判定准则较多,其中Neal-Smith准则的应用较为普遍。但Neal-Smith准则并不能准确反映PIO趋势,与驾驶员评估结论也存在一定差异。根据Neal-Smith准则进行飞机纵向驾驶员在环振荡分析的基本方法与程序,结合系统频域响应估算工具,分析得出满足系统性能要求的驾驶员相位补偿和增益区域,并基于该区域面积定义了新的PIO判断准则。与现有Neal-Smith准则相比,新的PIO判断准则可反映一类和二类PIO趋势随闭环系统参数的连续变化情况。
驾驶员在环振荡; Neal-Smith准则; 频域响应估计; 驾驶员工作区
0 引言
驾驶员在环振荡(PIO)指由于驾驶员的操纵而引起飞机持续或不可控的振荡[1]。因为该定义容易让人误解PIO的发生是驾驶员的责任,所以现今PIO一般定义为一种不利的人机耦合现象,即驾驶员操纵飞机时飞机发生持续或不可控的振荡[2]。
PIO是飞机、驾驶员和诱发因素三种因素共同作用的结果。由于驾驶员的自我调节机制具有很强的适应性,对该机制的研究还远未成熟。严重PIO往往导致灾难性后果,因此对严重PIO现象的复现存在较大困难,这也制约了对PIO的研究。基于此,对PIO的研究从未间断。目前,一般将PIO分为三类:一类PIO发生在将人机闭环系统等效为具有延迟环节的线性系统中,系统延迟导致高频相位梯度增大,使得更容易发生PIO;二类PIO主要是由实际控制系统元件的速率/位置限制引起;三类PIO是由除速率/位置限制因素以外的非线性因素引起[3]。针对一类PIO,目前已存在约10种判定准则和方法,各有优劣。针对二类PIO也存在约5种判定准则和方法。目前还没有针对三类PIO的判定准则,但是根据经验,消除一类和二类PIO后一般不会发生三类PIO。
虽然人们对PIO进行了大量的研究,得到了许多预测PIO的准则和方法,但是,各种判定准则的预测结果与实际情况都有一定出入。本文根据Neal-Smith准则分析PIO趋势的基本方法[4],对某型飞机进行纵向PIO仿真分析,提出驾驶员工作区的概念,并基于驾驶员工作区提出对Neal-Smith 准则的改进建议。
本研究结果还显示,两组患者术中均未见盆腔器官损伤发生。两组患者术后并发症发生率比较差异无统计学意义(P>0.05)。提示保留盆腔自主神经的子宫广泛性切除联合阴道延长术虽增加了手术难度,但并未增加术后并发症,临床安全性较高。
1 模型的建立
飞机纵向PIO分析模型包括三部分,即驾驶员模型、操纵系统模型和飞机本体纵向动力学模型。
随着生活水平的提高,居民追求房屋的质量与服务的要求也越来越高,物业的好坏直接关系到居民的生活质量。因此商品住宅的物业费也对其产生了一定作用。从图1来看,沿着西北方向到东南方向小区房价受物业费影响的程度越来越高。
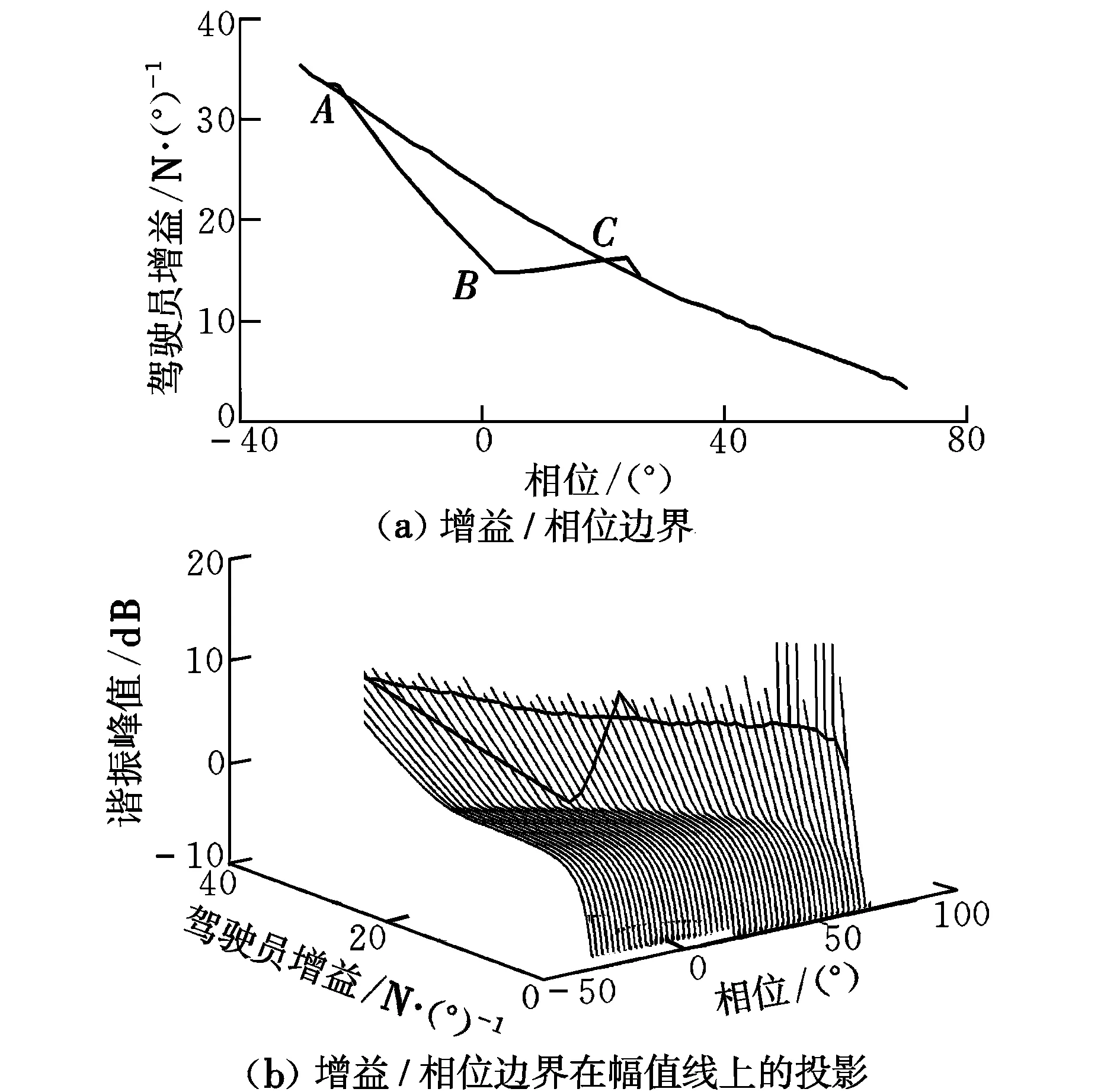
采用同样的方法得到驾驶员模型中的时间延迟分别为0.2 s和0.4 s时,驾驶员工作区如图10和图11所示。
驾驶员模型包括增益kp、时间延迟τ和相位补偿角θp,其传递函数为:
与传统的课堂教学相比,网络教学平台可以构建智能的交互式课堂系统,完善教学服务体系,增强学生粘度和满意度;课堂互动教学,反馈学习效果和课后操作系统和评估系统的实施,以及课外学生的自学。教师可以推荐阅读和提出预习目标,并且以学定教,模拟备课,以期达到更好的课堂授课效果;课外,学生可以根据老师的兴趣引导、智能推荐,寻找优秀资源,有需要还可以进行网上仿真实验,完成跨越式互动交流。
许多企业将生产用的厂房布置于农村地区,这些厂房的所排放的二氧化硫、二氧化碳、烟尘、粉尘往往超出国家标准许多。而在农村常见的秸秆燃烧也会产生大量烟尘以及污染气体,且此类空气污染往往具有季节性的特征。综合上述两点来看,是目前农村大气污染的主要因素。
(1)
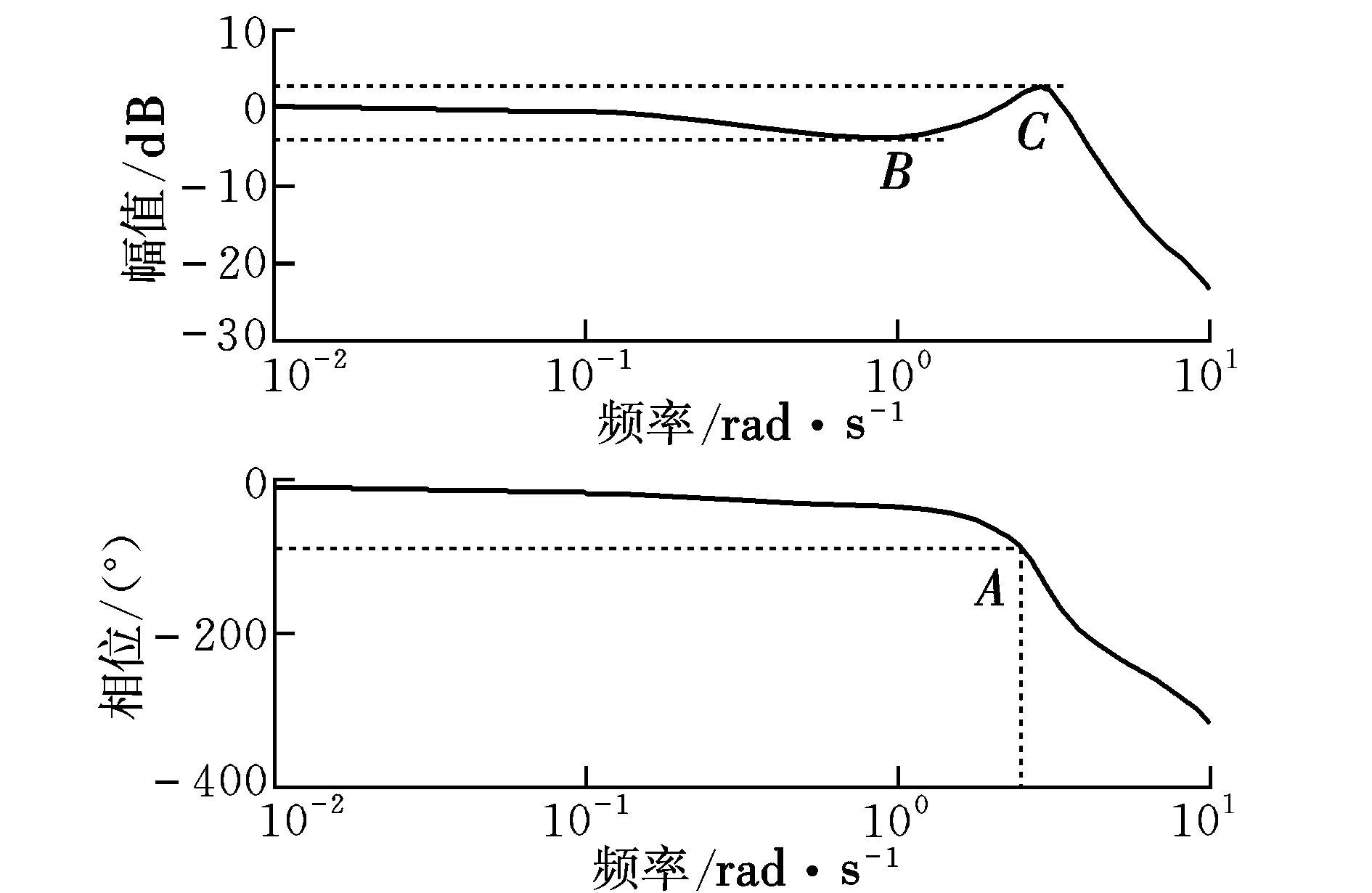
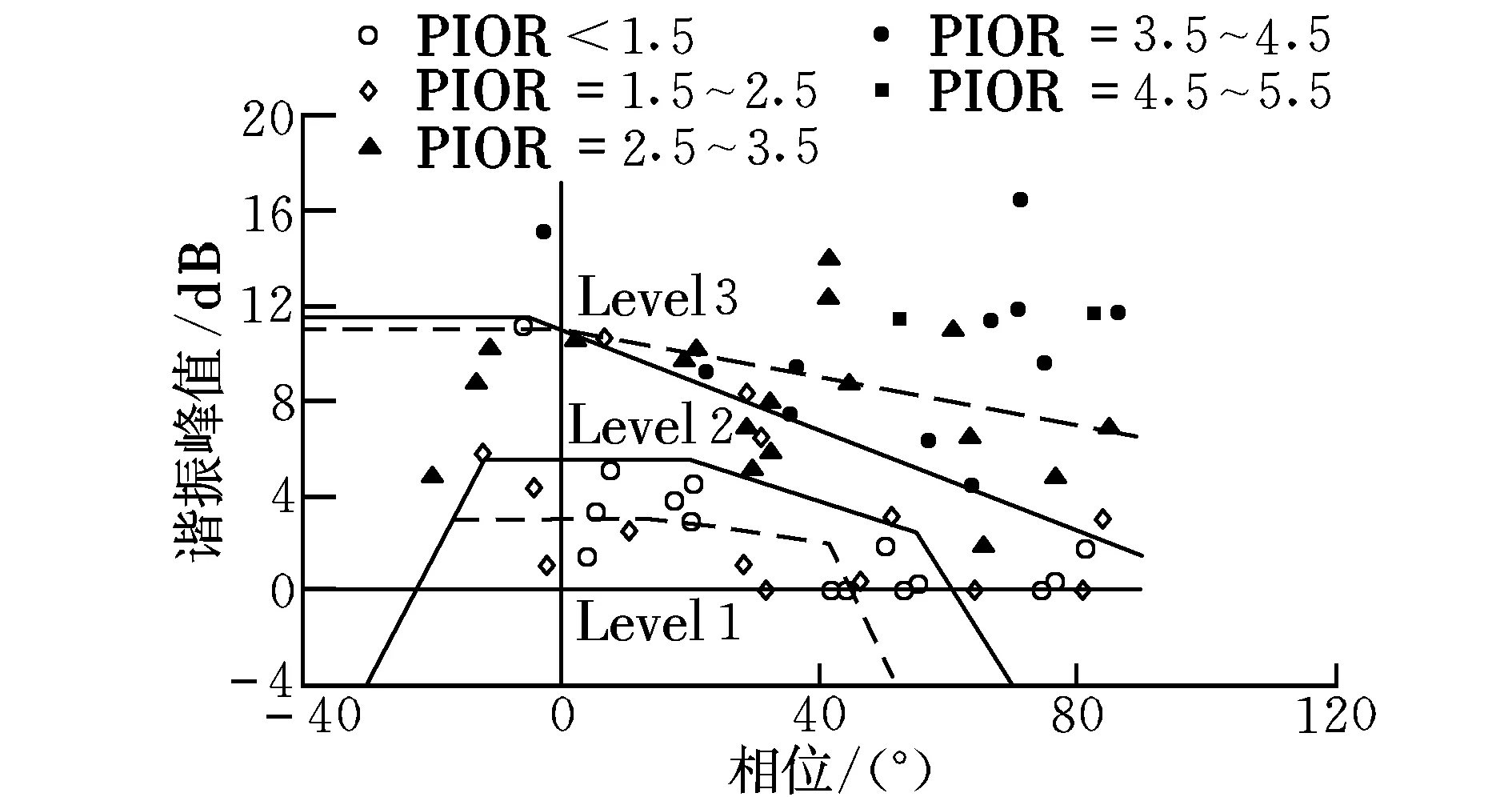
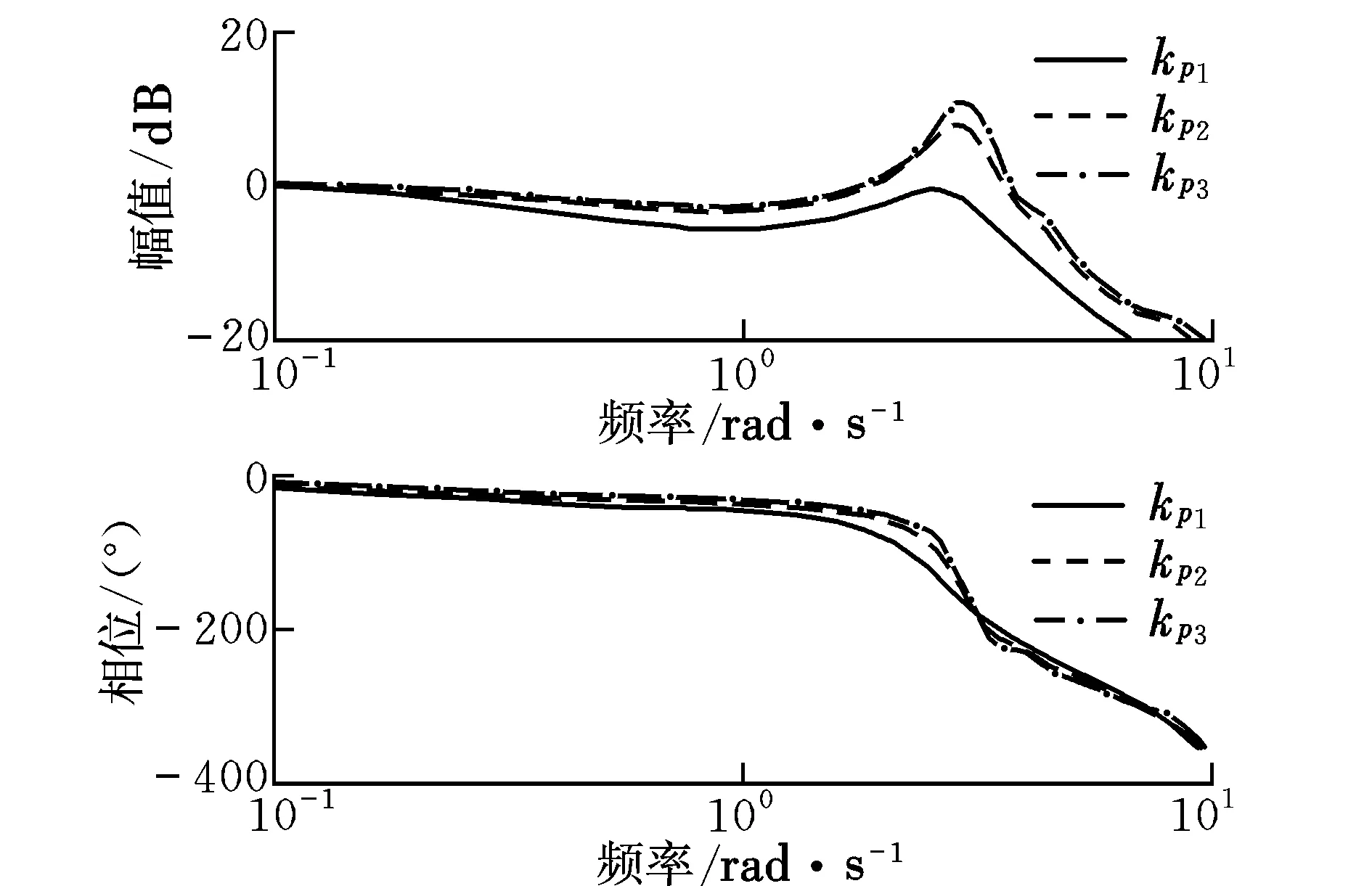
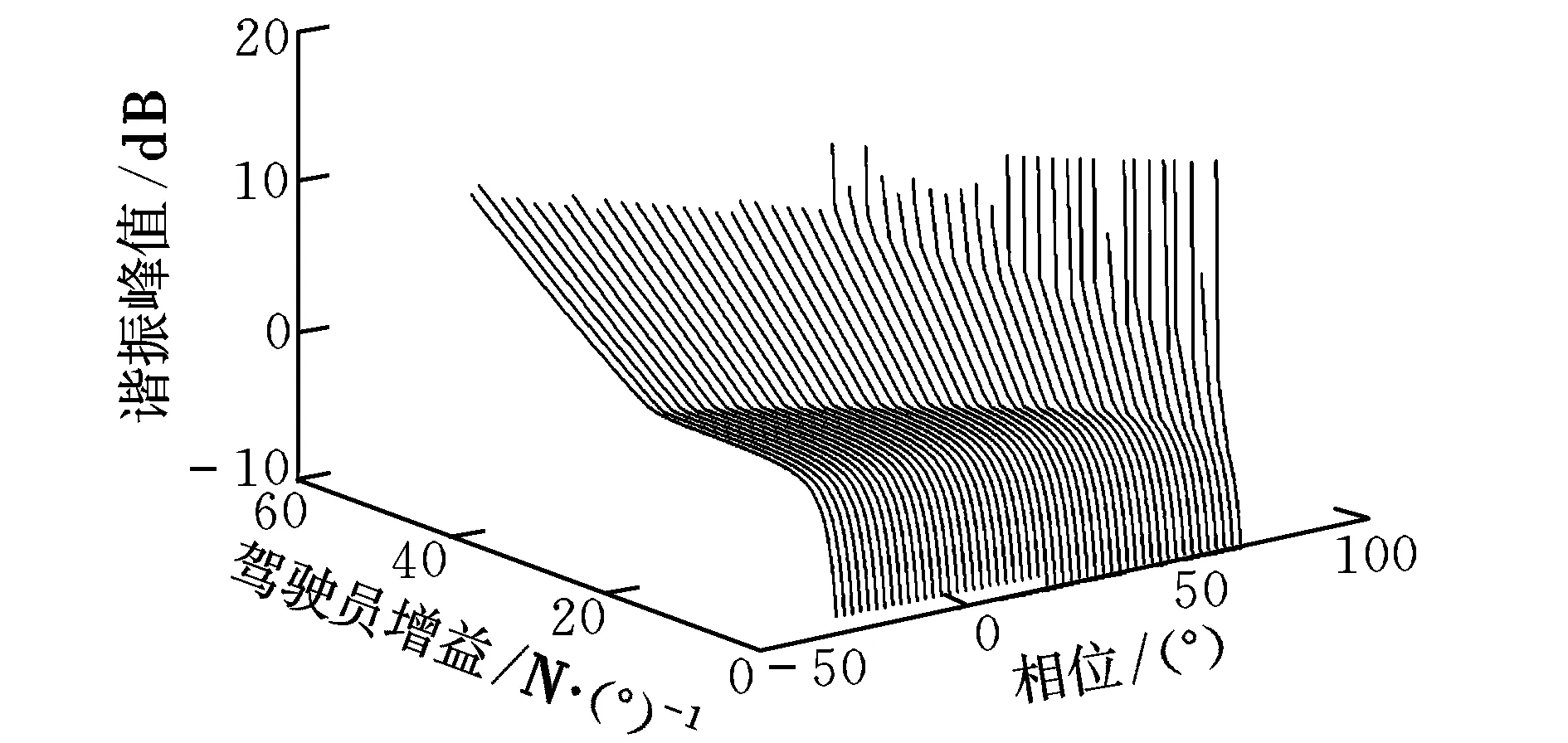
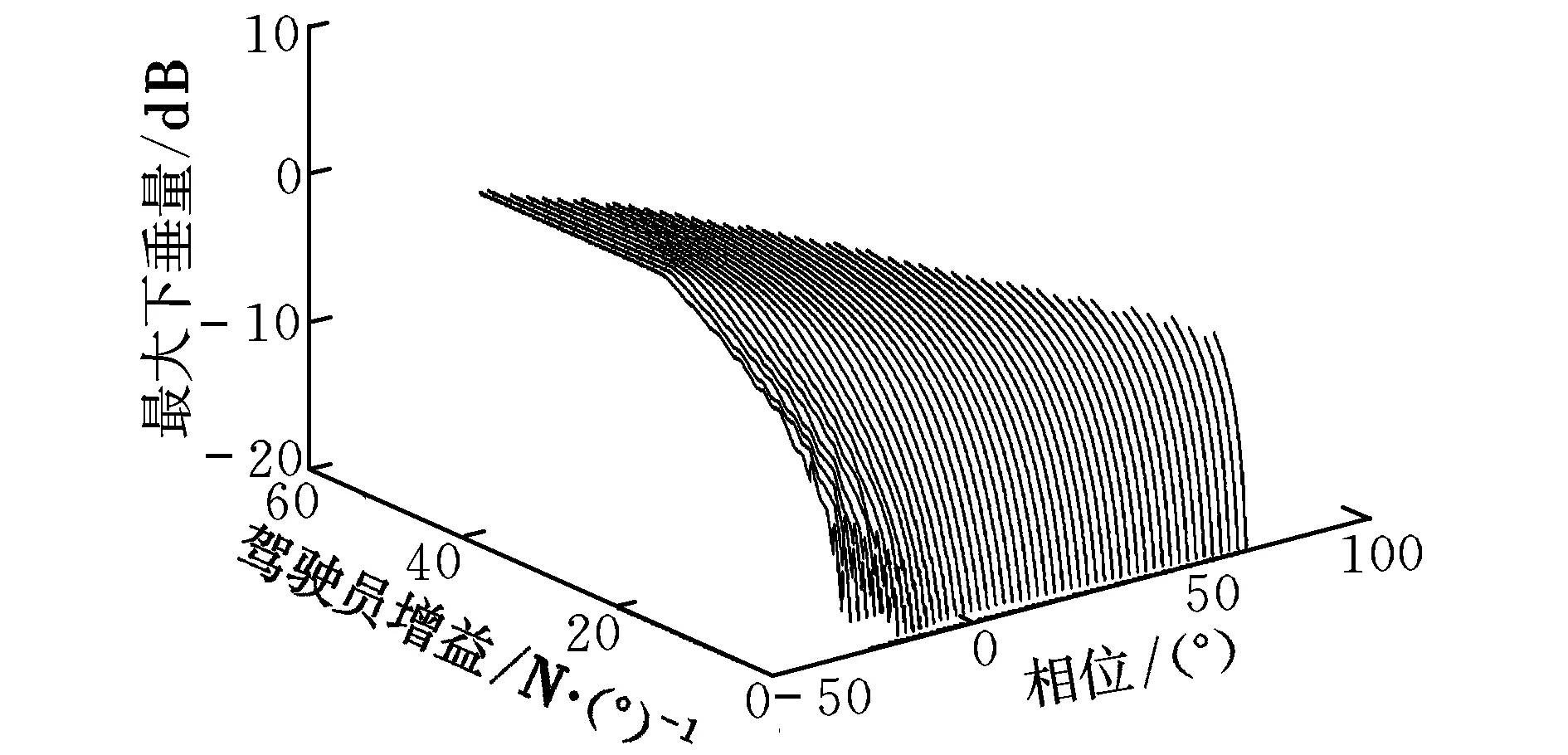
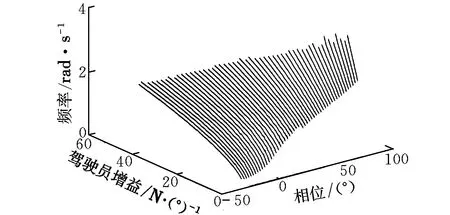
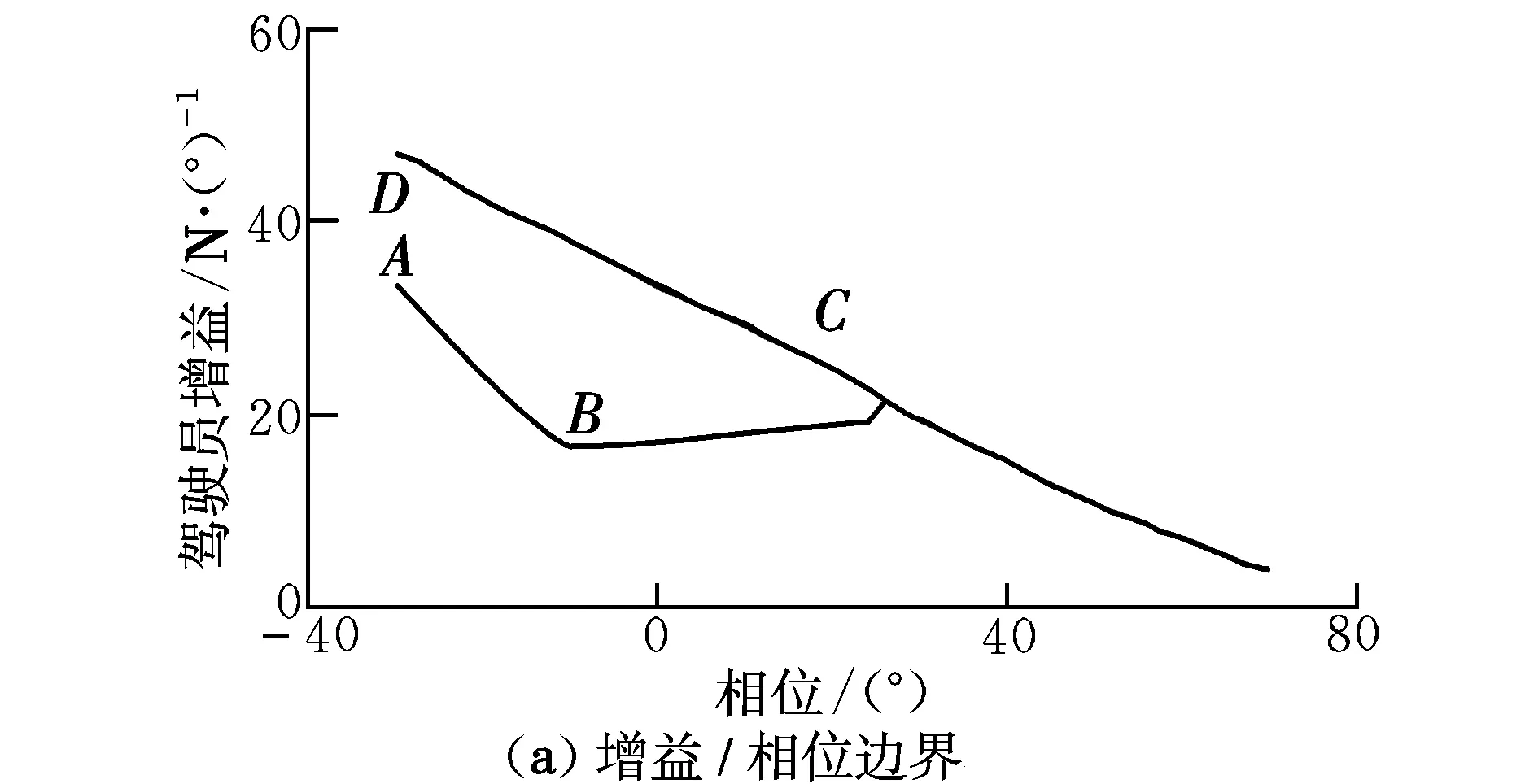
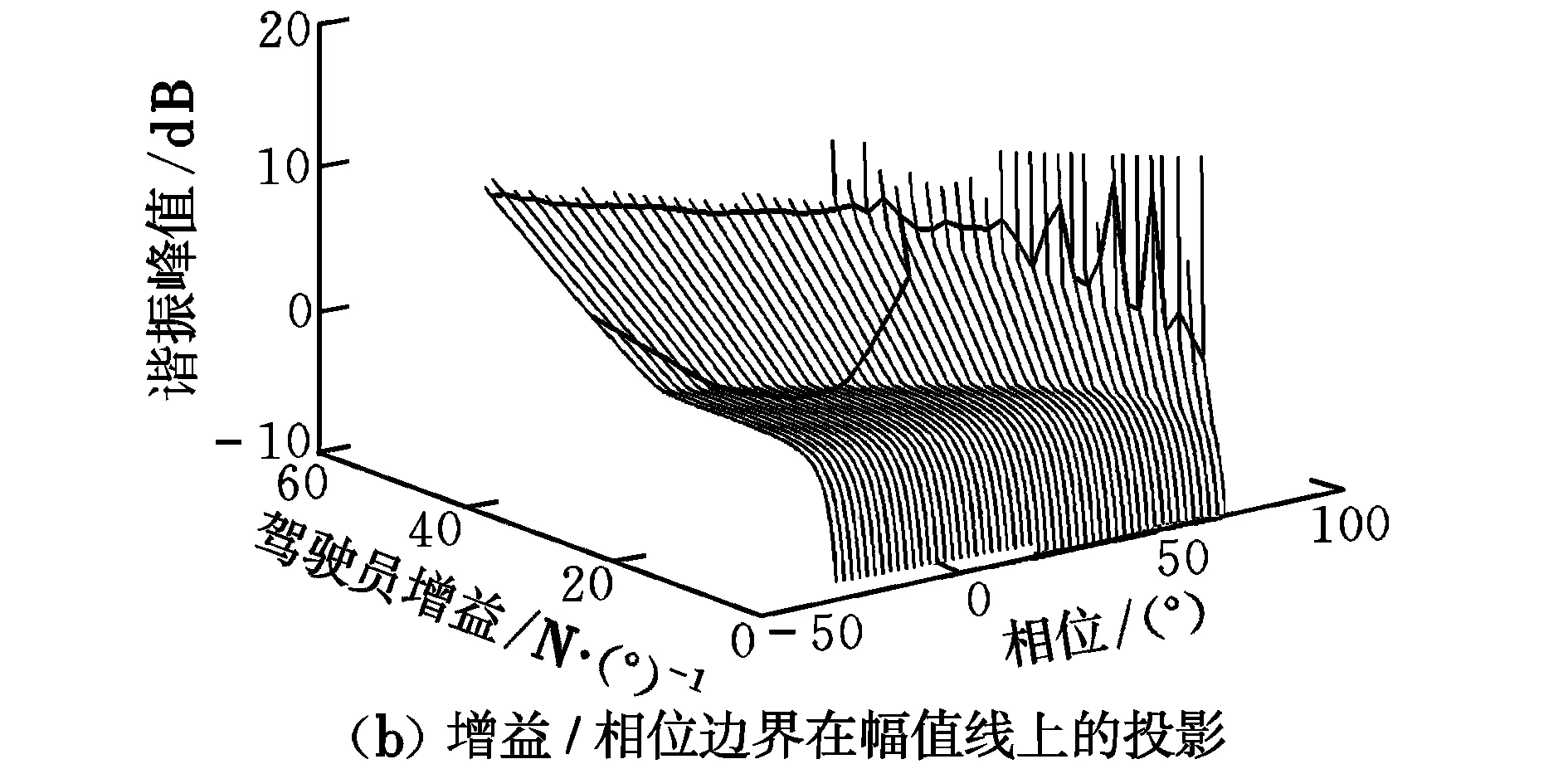
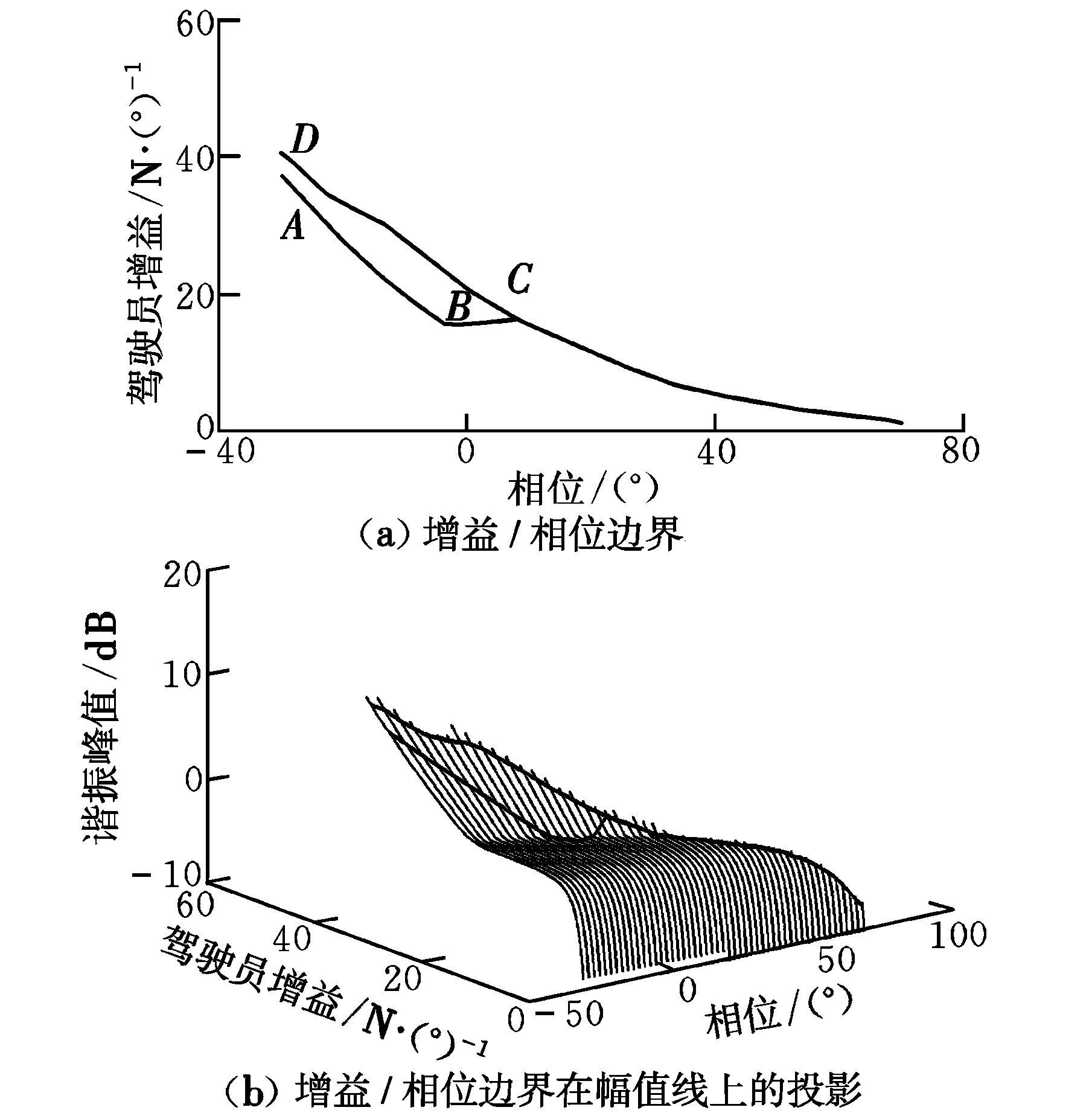
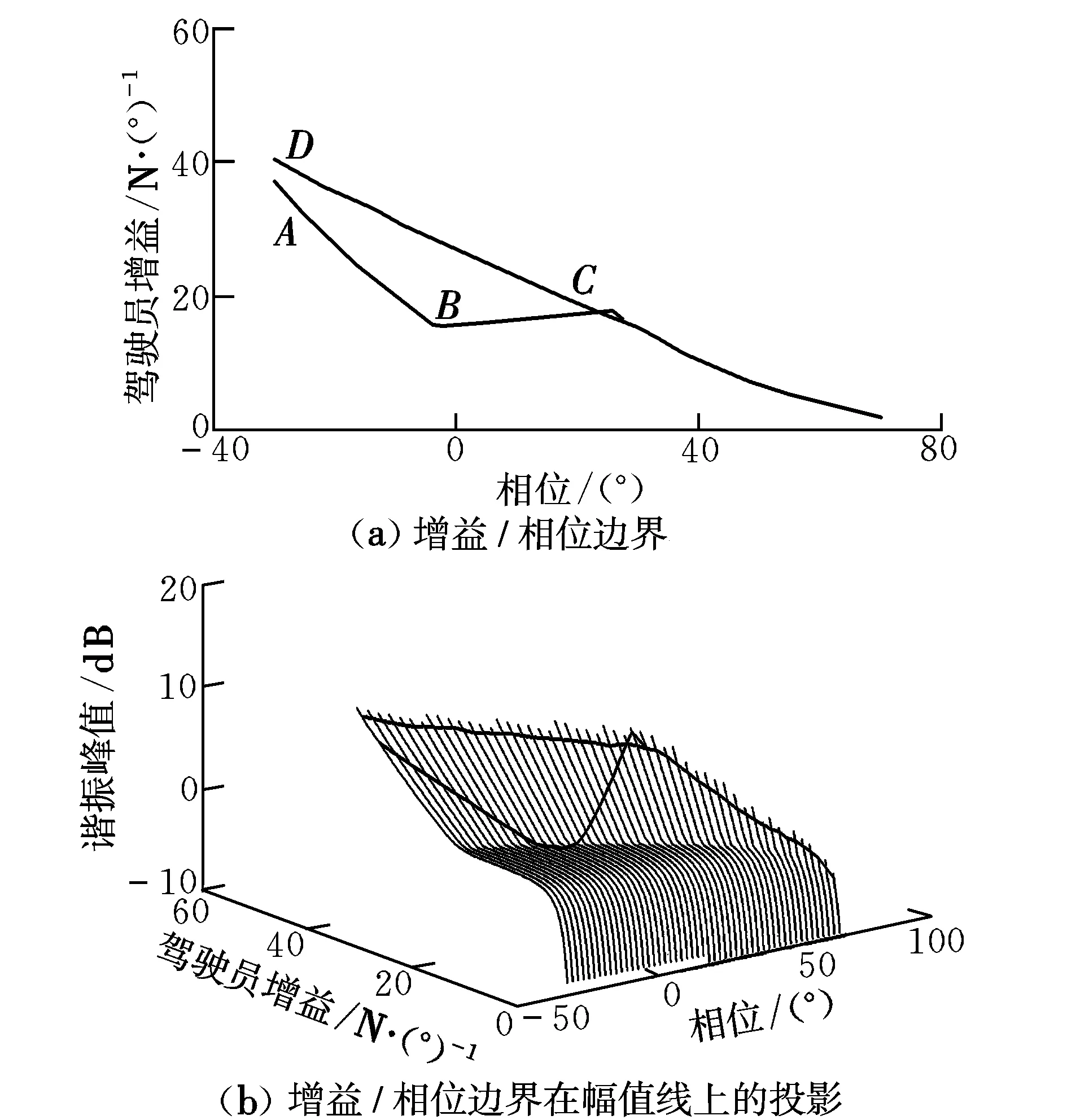
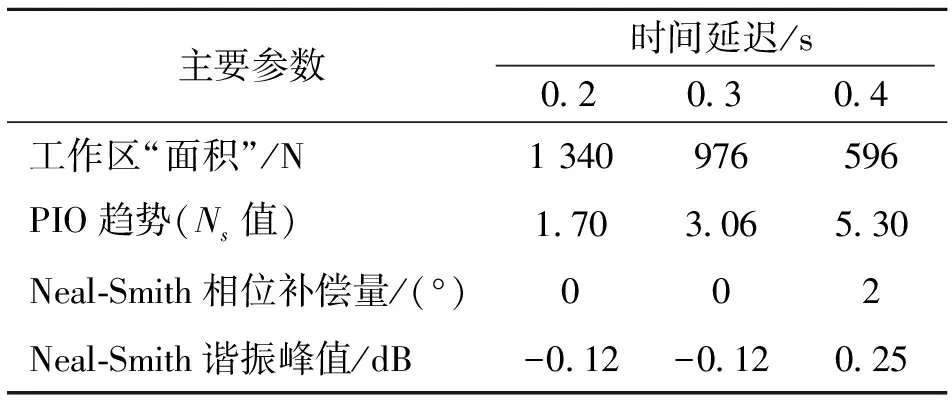
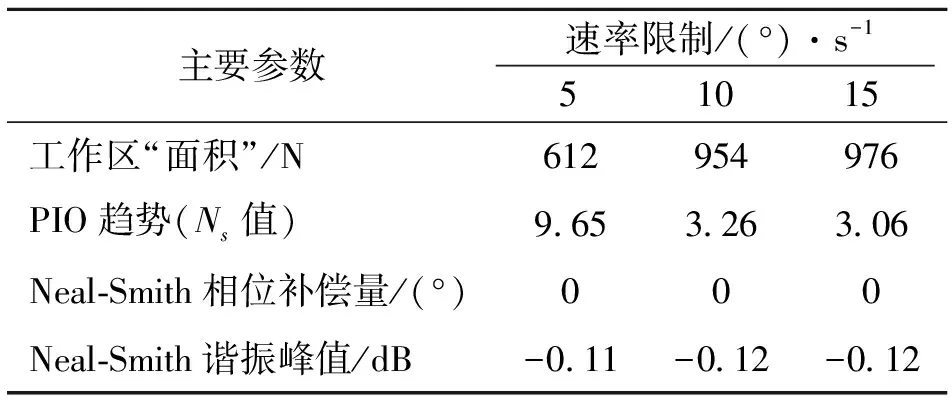
当tp1>tp2时,相位超前;tp1 Neal-Smith准则根据驾驶员对飞行品质的感性要求提炼而成,其基本概念包括带宽、最大下垂量和谐振峰值,均定义在人机闭环系统的伯德图上,如图3所示。图中:A点对应频率定义为带宽,即相位滞后90°时的频率;B点对应幅值为最大下垂量,即系统带宽内的最小幅值;C点对应幅值为谐振峰值。 综合考虑内部及远、近外层因素,运用科学方法,从标准、规模及功能入手,监控方案设计、建设进程、投资成本、项目资金的筹集与支出、财务结算等,充分分析各项工作特点,确定各项工作时间节点,让各项工作在统一的节奏下运行。 本文所研究的目标飞机采用液压助力式飞行操纵系统,可分为前后两段。前段为驾驶员输入端(驾驶盘/脚蹬)到助力器输入端,该段由驾驶盘/脚蹬、拉杆、摇臂及人感装置组成,为一开环系统;后段为助力器输入端到舵面,包括助力器、拉杆、摇臂及舵面,为一闭环系统。当驾驶员操纵幅度较小时,人感装置线性特性较好,前段操纵系统可表述为: (2) 综合飞机气动参数、重量/重心数据及其他设计参数,建立飞机飞行动力学模型。对模型进行线化分析可以得到飞机各平衡点的线性状态方程,即可得到各输入输出之间的传递函数。目标飞机某平衡点俯仰角与升降舵偏角之间的关系为: 目前已经标注完的语料共有100篇,其中地震、火灾、交通事故、恐怖袭击和食物中毒各20篇.这是第一期的标注,旨在确定标注流程和规范,对其中的指代进行了统计分析,在以后的工作中,会进一步基于CEC的剩余部分进行标注,并继续扩大. δe/δs=ke[15/(s+15)] (3) 式中:δe为升降舵偏角;ke为后段操纵系统增益。 本文所用的EP原理图见图1,EP电解液采用HF(40%):H2SO4(98%)=1:9(V/V)的混合酸,超导铌腔作为EP正极失去电子,高纯铝棒作为负极使氢离子转化为氢气,EP反应见方程式(1): 式中:δs为助力器输入端位移;fs为输入杆力;ks为前段操纵系统增益。 (4) 式中:δθ为飞机俯仰角扰动量。在进行纵向PIO分析时,可不考虑长周期运动的影响,通过系统识别可得到传递函数δθ/δe的低阶等效系统为: (5) 传递函数δθ/δe与其低阶等效系统的伯德图如图1所示。可以看出,当频率大于0.3 rad/s时,低阶等效系统准确拟合了δθ/δe。 图1 δθ/δe与其低阶等效系统的伯德图Fig.1 The Bode plot of δθ/δe and its low orderequivalent system 结合前文所述的驾驶员模型、操纵系统模型和飞机本体模型,即可得到驾驶员操纵飞机的闭环模型,如图2所示。将输入信号设置为不同频率的正弦信号,分别进行仿真并进行傅里叶变换即可得到闭环系统的伯德图。从伯德图可得到Neal-Smith准则的相关指标,包括最大下垂量、带宽及闭环谐振峰值。 对于后段操纵系统,驾驶员操纵指令通过拉杆传递到助力器输入端。滑阀运动使阀口打开,高压油液流入助力器。左右两腔形成压力差,助力器输出力作用于活塞和支座。活塞通过拉杆推动舵面运动,同时,活塞位移和支座位移均通过机械位移反馈导致滑阀开度减小,形成闭环控制,助力器活塞最终稳定在新的位置[5]。经仿真分析,在不考虑助力器速率饱和的情况下,后段操纵系统可等效为: 图2 驾驶员在环系统框图Fig.2 Pilot in-the-loop system block diagram 2.1 Neal-Smith准则简介 1.2 操纵系统模型 应用Neal-Smith准则进行PIO分析时,先根据飞行任务需要选定带宽,然后调节驾驶员参数直到带宽频率对应相位滞后为90°、最大下垂量大于-3 dB,且闭环系统谐振峰值最小,最后根据闭环系统谐振峰值和驾驶员相位补偿量判断PIO趋势。 图3 Neal-Smith准则基本概念Fig.3 Basic concepts of Neal-Smith criteria 根据闭环系统谐振峰值和驾驶员相位补偿量判断PIO趋势的依据为飞行试验所积累的经验,即驾驶员相位补偿/闭环系统谐振峰值和驾驶员PIO评价(PIOR)存在的相关关系,如图4为A种飞行阶段和着陆飞行时Neal-Smith准则与PIOR的相关关系[2-3]。图中:虚线表示A种飞行阶段;实线表示着陆飞行阶段。 图4 Neal-Smith准则与PIOR相关性Fig.4 Relationship between Neal-Smith criterion and PIOR 2.2 稳定边界的确定 固定驾驶员模型中的时间延迟为0.3 s,选定带宽为1.5 rad/s,取相位补偿角为30°,驾驶员增益值分别为kp1=9.2 N/(°),kp2=15.2 N/(°),kp3=17.2 N/(°)时,闭环系统伯德图如图5所示。 图5 驾驶员增益不同时的闭环系统伯德图Fig.5 Bode plot of closed loop system at different pilot gain 可以看出,随着驾驶员增益的增大,闭环系统幅频曲线出现一个峰值,且该峰值随着驾驶员增益继续增加,峰值左边临近频率处幅频曲线斜率显著增加,即PIO趋势越来越强烈。定义闭环系统幅频曲线峰值左边的最大斜率达到某一值时的驾驶员增益值为稳定边界,该斜率愈小,PIO裕度愈大。 2.3 驾驶员增益与相位补偿的影响 固定驾驶员模型中的时间延迟为0.3 s,选定带宽为1.5 rad/s,相位补偿角在(-30°,70°)范围内取值,驾驶员增益值逐渐增大直到闭环系统接近稳定边界。通过仿真分析可得到:闭环系统闭环谐振峰值与驾驶员增益和相位补偿的关系如图6所示,最大下垂量如图7所示,相位滞后90°时的频率如图8所示。 图6 闭环系统闭环谐振峰值Fig.6 Maximum magnitude of closed loop system 图7 闭环系统最大下垂量Fig.7 Maximum droop of closed loop system 图8 相位滞后90°对应的频率Fig.8 Frequency at 90° phase lag Neal-Smith准则要求在带宽范围内最大下垂量不超过-3 dB,带宽要求根据实际需要选定。结合图6和图7,可得到同时满足下垂量(≥-3 dB)和带宽要求(≥1.5 rad/s)的驾驶员增益和相位边界,如图9所示。 艾司西酞普兰与度洛西汀治疗抑郁症有效性与安全性的Meta分析 ……………………………………… 路淑淑等(10):1395 图9 满足下垂量和带宽要求的边界Fig.9 Boundary meeting the requirements of the bandwidth and droop 图9(a)中,曲线ABC以上区域满足下垂量和带宽要求,AB段以下区域不满足带宽要求,BC段以下区域不满足下垂量要求。曲线ABC上存在一个幅值最小的点,该点为进行Neal-Simth准则判定所需的点,定义为Neal-Smith准则判断点;曲线CD为系统稳定边界,其与曲线ABC共同构成的区域既满足性能要求且不会发生不可控的PIO,定义该区域为驾驶员工作区。 结合图6和图9(b)可以看出,人机闭环系统闭环谐振峰值先随着驾驶员增益的增大而快速增加,之后增大很缓慢,然后以一定斜率增大,最后斜率急剧增加直到系统发散,即发生了不可控的PIO。 2.4 时间延迟的影响 1.1 驾驶员模型 图10 驾驶员工作区(时间延迟为0.2 s)Fig.10 Pilot working region (time delay is 0.2 s) 图11 驾驶员工作区(时间延迟为0.4 s)Fig.11 Pilot working region (time delay is 0.4 s) 2.5 速率饱和的影响 1.3 飞机本体模型 采用同样方法,得到操纵系统助力器不同速率限制下的驾驶员工作区如图12~图14所示。 图12 驾驶员工作区(速率限制5 (°)/s)Fig.12 Pilot working region (rate limit is 5 (°)/s) 图13 驾驶员工作区(速率限制10 (°)/s)Fig.13 Pilot working region (rate limit is 10 (°)/s) 图14 驾驶员工作区(速率限制15 (°)/s)Fig.14 Pilot working region (rate limit is 15 (°)/s) 3.1 Neal-Smith准则改进分析 北美刺龙葵(Solanum carolinense L.)是一种恶性杂草,繁殖能力强,可造成作物严重减产,也是农作物病虫害的寄主,对牲畜和人类有毒,现已被列入我国进境检疫性有害生物名单。近年来北美刺龙葵不断随进口货物传入我国,进入我国定殖和传播扩散的可能性大增,因此,了解北美刺龙葵的分布区域、生物学特征等,对口岸检疫及防控具有积极的意义。 Neal-Smith准则根据判断点的位置,即满足要求的驾驶员相位补偿量和系统闭环谐振峰值所处区域来判断PIO趋势。当不同飞机或者同一飞机不同飞行状态下分析得到的判断点位置接近时,Neal-Smith准则并不能说明哪一构型的PIO趋势更强烈,即不能反映PIO趋势随系统参数的连续变化情况;另一方面,驾驶员实际操纵飞机时其相位补偿量和驾驶员增益往往在一定区域内变化。因此,基于整个驾驶员区来判断PIO趋势比基于区域内的一点更加全面客观。 参考仿真分析结果及驾驶员PIO评估经验可知,闭环系统实际的PIO趋势由驾驶员工作区域大小、该区域上各点对应的系统闭环谐振峰值以及驾驶员工作区的相位(相位补偿量)决定。定义新的PIO趋势指标为: (6) 式中:Ns为PIO趋势,数值越大,PIO趋势越强烈;k为常值系数;右边分子项为系统闭环谐振峰值magv对驾驶员工作区面积的加权积分;权系数wp由驾驶员相位补偿量的绝对值决定;Sop为驾驶员工作区的“面积”。 3.2 计算结果 单个悬挂小车液压回路如图3所示.该液压原理主要回路为平衡、调压回路,双联齿轮泵,适应悬挂系统的不同工况,各液压回路、元件的功能与液压蓄能式悬挂一致.由于单个机械液压式悬挂有2个液压悬挂油缸,区别于单个液压蓄能式悬挂的4个悬挂油缸,其承受的负载发生变化,故需对液压油缸结构重新设计. 按照新定义的PIO趋势指标和Neal-Smith准则,分别计算某型飞机不同情况下的纵向PIO趋势。 表1为驾驶员时间延迟的影响。可以看出:当驾驶员时间延迟由0.2 s变为0.3 s时,Neal-Smith判断点位置无明显变化,即Neal-Smith准则不能连续表达PIO趋势随系统参数的变化情况。 易非呆呆地站着,妈却自己醒了,她拍了拍枕头,说:“睡呀,非。”妈喊他们仨都是只喊一个字,“易非”喊“非”,“向南”喊“南”。 表1 时间延迟的影响 Table 1 Effect of time delay 主要参数时间延迟/s020304工作区“面积”/N1340976596PIO趋势(Ns值)170306530Neal⁃Smith相位补偿量/(°)002Neal⁃Smith谐振峰值/dB-012-012025 表2为操纵系统助力器不同速率限制的影响。可以看出:Neal-Smith准则不能用于分析二类PIO;新定义的PIO趋势指标在方向上符合经验,且能够连续表达一类和二类PIO趋势的强弱;由于缺少实际飞行数据,暂时还不能将Ns值与实际驾驶员评价结果进行比较。 表2 速率限制的影响 Table 2 Effect of rate limiting 主要参数速率限制/(°)·s-151015工作区“面积”/N612954976PIO趋势(Ns值)965326306Neal⁃Smith相位补偿量/(°)000Neal⁃Smith谐振峰值/dB-011-012-012 本文结合驾驶员模型、助力操纵系统模型、飞机本体模型,建立了飞机纵向PIO仿真模型。根据大量的仿真结果,结合Neal-Smith准则,提出了驾驶员工作区的概念,并基于驾驶员工作区定义了新的PIO趋势指标。Neal-Smith准则实质上是根据驾驶员工作区上闭环系统谐振峰值最小的点来判断PIO趋势的,不能反映驾驶员工作区的“面积”对PIO趋势的影响,新定义的PIO趋势指标能更加全面地反映实际PIO趋势。计算结果表明,新的PIO趋势指标能够反映PIO趋势随闭环系统参数的连续变化,为飞机设计工作提供更具体的分析手段。但是,新的PIO趋势指标还未经过实际飞行数据的检验,其实际应用价值还有待进一步研究。 [1] 高金源,李陆豫,冯亚昌,等.飞机飞行品质[M].北京:国防工业出版社,1999:154-166. [2] Filippone E,Biannic J M,Binh D V.PIO handbook [EB/OL].http://www.garteur.org/Technical,2002-01-20/2016-04-06. [3] Moorhouse D J,Boer W D,Fielding C.Flight control design:best practices[EB/OL].https://www.cso.nato.int/pubs/rdp.asp?RDP=RTO-TR-029,2000-12-05/2016-04-06. [4] Neal P T,Smith R E.An in-flight investigation to develop control system design criteria for fighter airplanes [EB/OL].http://www.dtic.mil/cgi-bin,1970-12-20/2016-04-06. [5] 王永熙.飞机飞行控制液压伺服作动器[M].北京:航空工业出版社,2014:43-52. (编辑:崔立峰) Analysis of Neal-Smith criterion improvement WANG Wei-zhi (The Fourth Research Department, AVIC General Research Institute Co., Ltd, Zhuhai 519000, China) There are many pilot-in-the-loop oscillation criteria,and the Neal-Smith criterion is popular. But Neal-Smith criterion can’t reflect PIO tendency exactly and the results from Neal-Smith criterion have some differences from PIOR. With the basic approach and procedure of Neal-Smith longitudinal PIO analysis, combined with frequency response estimation tools, a pilot phase compensation and gain region which meet system performance requirements can be obtained. A new PIO criterion is defined based on the region. Compared with Neal-Smith criterion, the new defined PIO criterion can express the continuous change of PIO tendency with the parameters of pilot-in-the-loop system. PIO; Neal-Smith criterion; frequency response estimation; pilot working region 2016-01-15; 2016-04-20; 时间:2016-05-18 13:49 王伟志(1985-),男,湖北荆州人,工程师,硕士研究生,研究方向为飞行控制系统。 V212.1 A 1002-0853(2016)06-0067-05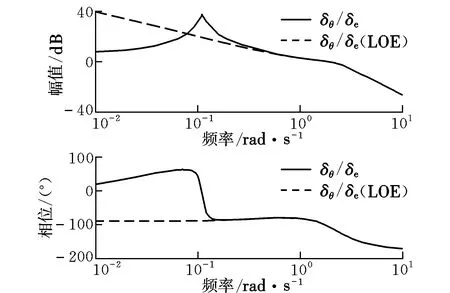
2 纵向PIO仿真结果与分析



3 Neal-Smith准则的改进

4 结束语
猜你喜欢
汽车实用技术(2022年12期)2022-07-05
新技术新工艺(2022年1期)2022-03-04
科技与创新(2018年12期)2018-11-29
黑龙江电力(2017年1期)2017-05-17
环境科技(2016年5期)2016-11-10
西南交通大学学报(2016年3期)2016-06-15
通信电源技术(2016年4期)2016-04-04
西北工业大学学报(2015年3期)2015-12-14
系统工程学报(2015年2期)2015-02-28
电网与清洁能源(2015年2期)2015-02-28
