
单兵火箭弹简易制导控制方法研究
2016-12-21 02:24陈伟谭晓军孙传杰冯高鹏薛晓中
飞行力学 2016年6期
陈伟, 谭晓军, 孙传杰, 冯高鹏, 薛晓中
(1.中国工程物理研究院 总体工程研究所, 四川 绵阳 621000;2.南京理工大学 能源与动力工程学院, 江苏 南京 210094)
单兵火箭弹简易制导控制方法研究
陈伟1, 谭晓军1, 孙传杰1, 冯高鹏1, 薛晓中2
(1.中国工程物理研究院 总体工程研究所, 四川 绵阳 621000;2.南京理工大学 能源与动力工程学院, 江苏 南京 210094)
为降低单兵制导火箭弹的成本,同时确保其具有较远的作用距离和较高的命中精度,针对静止目标,设计了单兵火箭弹简易制导控制律。首先,将飞行弹道进行分段设计,以瞄准线作为基准弹道,采用虚拟目标导引法实现对基准弹道的跟踪;然后,进行STT控制器的设计,基于典型设计点处控制器的参数插值,得到实时飞行过程中的控制器参数,确保火箭弹在整个飞行过程中具有较高的控制精度;最后,进行了仿真计算,通过仿真结果分析可知,所设计的制导控制系统具有较高的鲁棒性。
火箭弹; 简易制导; 虚拟目标; STT控制器
0 引言
单兵无控火箭弹命中精度低、作用距离短,为了改善单兵火箭弹的作用距离和命中精度,将火箭弹与制导控制系统相结合,在保证命中精度的前提下,大大增大火箭弹的作用距离[1-2]。制导火箭弹一般都安装有导引头,根据导引原理的不同,可分为电视导引、激光导引及雷达导引,导引系统使得制导火箭弹对静止目标和运动目标都具有较好的打击效果[3-5]。但对于单兵作战来说,其成本较高,效费比难以控制。
为了降低单兵制导火箭弹的体积、重量及成本,同时增大其作用距离,保证命中精度,本文针对静止目标,探讨了纯惯性制导体制应用于单兵攻坚火箭弹的可行性。将弹道分成筒内运动段、惯性飞行段、导引段3个飞行阶段。采用弹目瞄准线作为单兵简控火箭弹的基准弹道,采用虚拟目标导引法[6]追踪基准弹道,将复杂作战场地的三维弹道设计简化为二维平面设计,采用STT制导方法[7]进行控制律设计。在标准弹道上,选择4个能够表征各个弹道段特点的设计点进行控制器参数设计。通过速度插值,得到整个飞行过程中的控制器参数,确保单兵攻坚简控火箭弹从发射到命中目标的整个过程中具有较高的控制精度。最后,考虑风干扰和气动误差的影响,对所设计的制导控制系统的可行性和鲁棒性进行了验证。
1 动力学模型
坐标系定义如图1所示。图中,Onxnynzn为发射坐标系,Oxbybzb为弹体坐标系。
图1 坐标系Fig.1 Coordinate system
(1)
(2)
(3)
dm/dt=-mc
(4)
(5)
2 弹道方案设计
单兵简控火箭弹采用肩扛式发射筒发射,火箭弹采用两级发动机:助推发动机和续航发动机。助推发动机工作时间短,产生的推力大,能够保证火箭弹出筒后具有一定的初速度;续航发动机推力小,工作时间长,能够提供持续的续航动力。根据单兵简控火箭弹飞行的特点以及所采用的制导体制,可将飞行弹道分成3个阶段:
(1)筒内运动段:从助推发动机点火到火箭出筒前这一阶段;
(2)惯性飞行段:从火箭出筒到续航发动机点火前这一阶段,该阶段按惯性弹道飞行;
(3)导引段:从续航发动机点火到命中目标前这一段弹道。
弹道方案示意图如图2所示。
图2 弹道方案示意图Fig.2 Schematic diagram of ballistic scheme
3 虚拟目标导引律设计
根据给定的指标要求,完成基准弹道设计。在基准弹道上设计虚拟运动目标,导弹采用追踪法跟踪虚拟目标,通过虚拟目标的引导实现对基准弹道的跟踪。
3.1 基准弹道生成
通过观瞄系统瞄准目标进行发射,瞄准示意图如图3所示。观瞄系统安装在发射筒上,瞄准镜与发射筒夹角ϑ0固定,这里称ϑ0为射角。初始对准目标时,发射筒与地面的夹角记为ϑ。
图3 瞄准示意图Fig.3 Sketch map of aiming
结合单兵武器直接瞄准发射特点,基准弹道取发射点与目标的连线。以射击时的弹目瞄准线作为基准弹道,瞄准线的计算公式为:
ym=xmtan(ϑ-ϑ0)
(6)
3.2 基准弹道跟踪
该方法的思路是首先设计出虚拟目标的运动规律,虚拟目标沿基准弹道飞行,位于导弹前方,且保持一定的超前量,导弹采用比例导引来跟踪虚拟目标,通过虚拟目标的引导作用实现对基准弹道的跟踪。具体步骤如下:
(1)计算虚拟目标位置
虚拟目标在瞄准线上运动,且在射程方向上始终超前导弹当前位置一定距离,超前量记为ΔL,虚拟目标位置按下式计算:
(7)
式中:xT,yT,zT为虚拟目标位置分量。
(2)计算视线角速度
在发射坐标系下,虚拟目标与导弹之间相对位置分量可由下式计算得到:
(8)
基于虚拟目标与导弹之间的相对位置,利用相对运动学计算视线角速度,计算公式如下:
(9)

(3)计算导引指令
导引律采用比例导引法,计算形式如下:
(10)
(11)

4 弹道控制律设计
采用STT方法[7]进行控制律设计,将俯仰、偏航、滚转三通道进行解耦控制。俯仰通道控制器包含3个反馈回路。其中,俯仰角速度ωz直接反馈到内回路,起到阻力增稳作用;ωz经过一阶惯性环节生成伪姿态,然后反馈到中回路,起到姿态增稳作用;外回路反馈法向过载ny,使得火箭弹实时跟踪法向过载指令。可以得到俯仰通道控制律为:
δz=-kωzωz-kωzkθ∫ωzdt-kωzknykθ∫(ny-nyc)dt
(12)
式中:kωz,kθ,kny为俯仰通道控制器参数。
火箭弹采用轴对称布局,偏航通道控制器结构与俯仰通道控制器结构一致,且具有相同的控制器参数。这里直接给出偏航通道控制律为:
δy=-kωzωy-kωzkθ∫ωydt-kωzknykθ∫(nz-nzc)dt
(13)
火箭弹在飞行过程中始终保持滚转稳定,滚转角指令等于零。滚转通道控制律为:
δx=-kφφ-kωxωx
(14)
式中:kφ和kωx为滚转通道控制器参数。
5 仿真结果及分析
由于火箭弹在飞行过程中飞行速度变化较大,为了确保火箭弹在整个飞行过程中的控制精度,在标准弹道上选择速度最低、最大及两个中间状态点进行控制器参数设计,然后通过插值得到火箭弹在飞行过程中对应的控制器参数。典型设计点处控制器参数如表1所示。
表1 典型设计点处控制器参数
Table 1 Controller parameters of typical design points
参数特征点1234V/m·s-14580200320kny028053045025kθ48109203286kωy-12-11-09-07kφ-56-123-156-149kωx-032-032-032-031
风在火箭弹使用环境中是普遍存在的[9]。为了验证所设计的制导控制系统抵抗风干扰的能力,分别在无风、顺风(沿发射坐标系Onxn轴正方向)、侧风(沿发射坐标系Onzn轴正方向)、逆风(沿发射坐标系Onxn轴负方向)条件下进行仿真,风速为14 m/s,同时加入10%的气动误差,来检验制导控制系统的鲁棒性。
设火箭弹初始发射位置为(0,0,0)m,目标位置为(1000,0,0)m。根据工程经验,取射角ϑ0=7°,虚拟目标超前量ΔL=300 m,仿真结果如表2和图4所示。
表2 末端弹道参数
Table 2 Terminal ballistic parameters
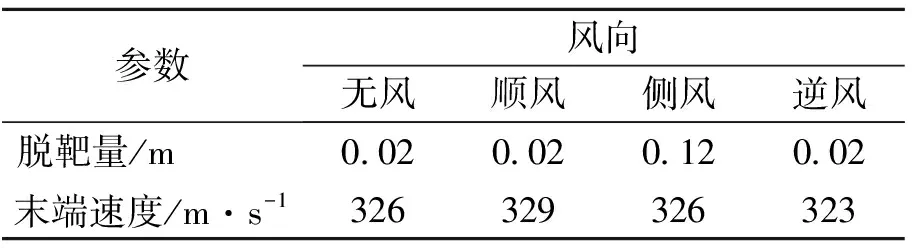
参数风向无风顺风侧风逆风脱靶量/m 002002012002末端速度/m·s-1326329326323
由仿真结果可知,存在顺风和逆风干扰时,除了末端着靶速度外,风对整个飞行弹道参数的影响较小。顺风时,由于飞行过程中受到的阻力较小,使得末端速度较大;逆风时,受到的阻力较大,使得末端速度较小,两者末端速度相差达到了6 m/s,但相对于末端速度可以忽略;存在侧风干扰时,从图4(b)可以看出,飞行初始段飞行轨迹出现较大的侧偏,最大侧向弹道偏差达到了1.2 m,具有大的侧滑角,但所设计的制导控制系统能够在短时间内及时修正火箭弹飞行轨迹,确保了较高的命中精度,表明所设计的制导控制系统能够较好地抑制风干扰带来的影响,且具有较高的鲁棒性。
6 结束语
根据单兵简控火箭弹飞行特点以及所采用的制导体制,本文以瞄准线为基准弹道,采用虚拟目标导引法计算打击静止目标所需的法向过载和侧向过载指令,采用STT控制器结构将俯仰、偏航、滚转三通道进行解耦控制。通过仿真结果可以看出,所设计的制导控制系统能够较好地抑制风干扰和气动误差带来的影响,具有较好的鲁棒性。由于单兵简控火箭弹的飞行时间较短,在打击静止目标时,采用纯惯性制导体制能够保证较高的命中精度。但对于打击运动目标,采用单一的瞄准射击方法很难满足较高的命中精度,因此,后续工作将着重探讨简控火箭弹打击运动目标的可行性。
[1] 王强,解艳芳,石丽娜.制导技术在火箭弹上的应用分析[J].飞航导弹,2010(3):70-75.
[2] 杨明,高宏伟,汤祁忠.制导火箭弹射表编拟研究[J].火力与指挥控制,2013,38(12):156-159.
[3] Zhang Yongfang,Zhang An,Lu Yanjun.Simulation of TV self-guided weapon[J].Transaction of Nanjing University of Aeronautics and Astronautics,2012,24(1):68-73.
[4] Mubarak Al-Jaberi,Mark Richardson,John Coath,et al.The simulation of laser-based guided weapon engagements[C]//Schum Kevin.Modeling and Simulation for Military Applications.American:Proceedings of the SPIE,2006:20-26.
[5] 温先福,李刚,田德伟,等.导弹主动被动雷达导引头共口径技术研究[J].弹箭与制导学报,2015,35(1):32-36.
[6] 周须峰,孟博.空空导弹越肩发射的虚拟目标比例导引律[J].飞行力学,2014,32(3):248-252.
[7] 李聪颖,于进勇,李亮,等.STT反舰导弹末端机动的控制方案比较研究[J].科技导报,2008,26(22):26-29.
[8] 钱杏芳,林瑞雄,赵亚男.导弹飞行力学[M].北京:北京理工大学出版社,2000:29-48.
[9] 李卫丽,严洪森,张维琴.风干扰下某型导弹的弹道仿真[J].计算机技术与发展,2011,21(1):246-249.
(编辑:姚妙慧)
Research on simply guidance control method for individual rocket projectile
CHEN Wei1, TAN Xiao-jun1, SUN Chuan-jie1, FENG Gao-peng1, XUE Xiao-zhong2
(1.Institute of Systems Engineering, China Academy of Engineering Physics, Mianyang 621000, China; 2.School of Energy and Power Engineering, Nanjing University of Science and Technology, Nanjing 210094, China)
To reduce the cost of guided individual rocket projectile, and to ensure that it has a longer striking distance and higher accuracy, the simply guidance control law of the individual rocket projectile was designed aiming at the static target in this paper. First, the flight trajectory was segmented, aiming line was used as the standard trajectory, the standard trajectory tracking was realized by the virtual target guidance method. Then the STT controller was designed to get the controller parameters in real time flight based on the parameter interpolation of the controller at typical design points, so as to ensure the rocket has a higher control accuracy in the whole flight envelop. Last, the simulation analysis shows that the designed guidance control system has high robustness.
rocket projectile; simply guidance; virtual target; STT controller
2015-11-25;
2016-03-28;
时间:2016-04-22 09:52
陈伟(1986-),男,湖北随州人,工程师,博士,研究方向为飞行器控制。
TJ761.11
A
1002-0853(2016)06-0054-04
猜你喜欢
北京航空航天大学学报(2016年9期)2016-11-16
北京航空航天大学学报(2016年7期)2016-11-16
电源技术(2016年2期)2016-02-27
北京航空航天大学学报(2016年4期)2016-02-27
中国卫生(2015年3期)2015-11-19
中国卫生(2015年8期)2015-11-12
中国卫生(2014年11期)2014-11-12
太空探索(2014年1期)2014-07-10
