
基于虚实结合的港口装备控制实验平台
2016-12-20 06:29曹小华
实验室研究与探索 2016年2期
曹小华, 肖 扬, 程 详
(1. 武汉理工大学 物流工程学院,湖北 武汉 430063;2. 天津港股份有限公司 科技设备部,天津 300461)
基于虚实结合的港口装备控制实验平台
曹小华1, 肖 扬2, 程 详1
(1. 武汉理工大学 物流工程学院,湖北 武汉 430063;2. 天津港股份有限公司 科技设备部,天津 300461)

针对港口装备控制实验因缺乏相应实验设备难以有效开展的现状,提出了虚实结合的港口装备实验平台概念。利用Flexsim软件搭建起港口装备的三维仿真控制模型,对其进行二次开发,实现将模型状态信息写入Excel电子表格并且同时从中读取控制信号;利用WinCC组态软件与PLC组态通讯,并且通过读写Excel实现控制信号与反馈信息在控制硬件PLC与虚拟模型之间传递。该实验平台突破了大型实验装备缺乏的限制,可为港口大型装备相关控制实验的开展提供对象模型,实现控制过程的三维可视化,对大型装备实验开展具有借鉴意义。
实验平台; Flexsim; 虚实结合; 港口装备
0 引 言
基于硬件设备的传统实验室,由于受到时空间、经费及设备人员安全的限制,经常不能给学生提供足够的硬件资源去完成相应的实验[1]。如在港口物流大型装备的控制实验教学中,一方面缺乏资金与场地安置这类设备进行实验教学;另一方面这种大型实验往往涉及强电、高空等危险环境,实验的安全性也需要考量,高校往往不能提供很好的设备以及场地进行教学实验,造成应该有的实验空缺或者达不到实验的效果。
计算机仿真技术具有可视化、成本低、无场地环境限制、可控性强等优势[2],伴随着图形加速硬件的快速发展以及 3D 实时动画引擎技术的日益成熟,3D 虚拟仿真设计近来被越来越多地引入教学环节之中,创新了传统的教学模式[3]。高等学校往往针对理工科的实验教学,设计了3D虚拟实验教学系统[4],这种虚拟实验固然有很多优点,但实际工程中动手能力的培养还是离不开实物实验的训练,创新思想更是需要实践去验证,这就出现了如何正确处理虚拟实验和实物实验教学的关系问题[5]。
1 虚实结合实验平台的提出
对于港口装备,以最具代表性的港口装卸起重装备为例。目前,国内外相关起重装备的仿真研究有很多,但大多集中在离散系统建模仿真和模拟操作培训的方面,属于应用型的研究,针对性太强,这和高校教学实验的目的并不相符。相关的离散仿真模型更多的是关注在基于离散系统建模仿真方法处理码头或者堆场的资源配置、运营管理、运营环节局部研究,但针对于单独一个起重机单体控制调度任务的研究较为缺乏[6],对于本文研究对象即港口装备控制实验平台来说显得太“虚”;而相关的模拟培训设备则侧重于通过虚拟现实技术实现培训者感官效果与操作体验与真实装备一致,系统复杂冗余,目的集中在于装备的操作培训,并不能体现控制实验的自由度,不能提供一个自由开发的实验操作平台让师生有更大的实验空间,对于本实验平台来说显得又太僵化,太“实”。
目前有关研究,虽然它们都取得了相应的研究成果,但单独作为本文研究的起点或蓝本似乎都难以得到预期的效果,所以本文将这两方面的研究成果结合起来,进行优势互补,提出了基于虚实结合的实验平台解决方案。通过场景化的虚拟三维显示模拟出一个逼真的实验装备环境以及真实的PLC硬件控制系统来作为设备控制实验的操作平台相结合,这样一虚一实,破解港口装备控制实验难题,突破各种现实障碍,为师生提供一个良好的教学实验平台,节省实验经费,保障实验安全,达到实验教学的目的。
本文采用Flexsim三维仿真技术,建立港口装备三维仿真模型并进行二次开发,利用WinCC组态软件及Excel电子表格搭建数据接口,将虚拟的计算机三维仿真模型和实际的PLC控制器等硬件设备组合,建立一套虚实结合的控制实验平台。平台构成框图见图1。
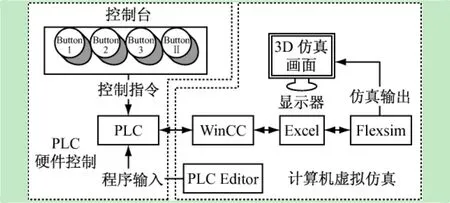
图1 平台构成框图
2 虚实结合控制实验平台的搭建
虚实结合控制实验平台是硬件控制与软件三维仿真的结合,按照其搭建所用的技术手段,将建模过程分为Flexsim建模,WinCC组态,PLC控制。
2.1 Flexsim建模
Flexsim仿真软件是一个面向对象的模拟仿真软件[7],借助其强大的三维建模功能,可以快捷地建立1个真实系统的 3D 计算机模型[8],它具有完全的C++面向对象性,超强的3D虚拟现实(3D动画),直观的、易懂的用户接口,卓越的柔韧性(可伸缩性)[9],而且其在图形建模环境中集成了C++IDE和编译器,十分便于二次开发;另外Flexsim中有一个效率非常高的仿真引擎,该引擎可同时运行仿真和模型视窗,可使实验平台实时提供三维控制仿真画面。
结合实验平台研究,Flexsim模型建立分为几何建模,数据调用,运动建模。
几何建模中,Flexsim可以直接导入3DS (3D Studio),VRML,3D DXF and STL等类型多种格式的文件,方便用户在其它三维建模工具中建立三维模型然后导入。以岸桥起重机为例,本文利用这种方式建立了岸桥的三维装备模型(用于替代实际装备,作为三维显示的控制载体)、虚拟三维场景(用以构建一个逼真的装备环境如港口码头、船舶、建筑、背景等)的三维模型,Flexsim内置了虚拟现实浏览窗口,可以让用户添加光源、雾以及虚拟现实立体技术,效果见图2。

图2 岸桥港口几何模型
在数据的调用方面,Flexsim可以利用ODBC(开放式数据库连接)和DDEC(动态数据交换连接)来输入输出仿真数据,本文利用一个Excel电子表格作为数据库结合ODBC的方式进行数据传输。使用Flexsim内置的模块化的工具Excel的模块,可以将一个Excel表格的数据全部或局部(设置起始和终止的行列)导入到Flexsim的全局表Global Table中;还可以利用IDE开发语句操作Excel,如Excellaunch(“C:/…”)语句打开计算机中的Excel文件,excelreadnum(numrow, numcol)语句读Excel某一单元格的值,excelwritenum(num row,num col,num vauel)语句将数值写入Excel某一个单元格;通过这些手段实现Flexsim与外部数据库之间的连接调用。
为了实现模型的动态仿真控制,这里还需要对模型的属性参数进行一系列的设置,在模型的触发器中写入相应的控制程序,通过读取Flexsim全局表的值来判断做出相应的动作,同时在完成1个动作后将反馈信号写入Excel。为了实现仿真实体对控制信息的实时响应,本文利用发生器Source每隔0.1 s产生1个实体,在这个Source的Oncreation触发器中编写语句通过这个实体触发读取控制信号反馈状态信息等。通过这样我们的实验装备模型每隔0.1 s就会刷新一次全局表的信息,同时将状态信息写入Excel,实现动态响应与控制,信息刷新流程见图3。
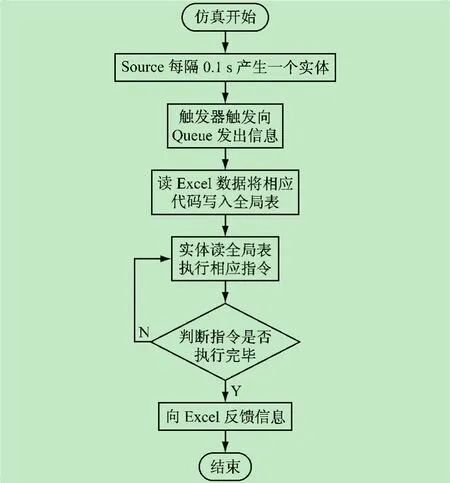
图3 控制信息刷新流程图
至此,就完成了Flexsim模型的几何建模、数据调用和动态仿真控制的建模。
2.2 WinCC组态
WinCC是SIEMENS与Microsoft公司合作开发的、开放的过程可视化系统[10],它提供主流的PLC系统通信通道,WinCC支持所有连接西门子S5/S7控制器,还包括PROFIBUS、DDE和OPC等非特定控制器的通信通道。
本文就是利用WinCC与Excel、VB的本地DDE通讯将PLC与仿真软件平台连接在一起了。利用其强大的组态以及访问外部数据库的功能,实现了WinCC全局VBS脚本定向采集、修改PLC特定变量以及对Excel进行修改、更新、读写等功能。
(1) 与PLC的组态。启动WinCCExplorer,建立一个单用户项目设置与PLC端口的通讯连接。然后在驱动程序连接下建立结构类型和元素,给过程变量分配1个在PLC中的对应地址(地址类型与通讯对象相关)[11]。
(2) 与Excel的通讯。启动WinCC Explorer,在变量管理上添加新的驱动程序“Windows dde.ch”。在 DDE 上进行新的驱动程序连接,设置相应的属性连接Excel文件[12]。利用WinCC全局脚本以及Excel,实现PLC与Flexsim软件之间数据调用的流程,见图4。在一些实验平台[13-15]研究中,数据通信往往是系统成败的关键。
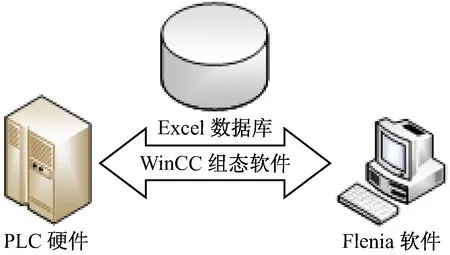
图4 WinCC实现数据调用流程
2.3 PLC控制硬件
PLC控制器硬件作为实验平台的控制核心,提供控制主体,用以实验教学编程控制,以及接收处理相关信号等。本文研究的虚实结合实验平台采用外部操作设备控制手柄,按钮等与PLC连接作为输入设备构成硬件控制系统,达到以硬件控制器驱动三维软件仿真画面的目的。
港口装备有很多,包括门座式起重机、桥门式起重机、岸桥起重机等等,为了与实际控制系统尽可能相似,本文以岸桥的控制为例对PLC的控制要求进行分析,介绍实验平台是如何建立。岸桥的控制要求包括:大车行走、小车行走、悬臂俯仰、装载货物、货物起升、总启动开关、停机开关、急停开关、限位开关等,另外还需要具有对相关的信息数据进行反馈的功能。实验平台事先定义好输入输出的I/O点接口供学生编程时使用,以便与WinCC以及Flexsim的信息进行对接。
用1台计算机作为上位机,WinCC通过RS232接口与PLC之间进行通信,以监控PLC的控制过程以及进行对PLC编程。控制柜面板上安装有按钮、指示灯、各种传感器等与PLC的I/O端口连接。操作者既可以手动操作面板控制各子系统运行,也可以通过WinCC监控面板控制系统运行。
3 设备连接及调试
将PLC与计算机连接打开WinCC软件进行组态,打开Flexsim模型点击仿真运行,将仿真时钟调整为1(也就是1∶1的时间),首先利用组态软件进行调试,点击相应的控制界面上的按钮观察Flexsim中岸桥模型的运动,并观察相应限位开关是否起作用。结合传统的PLC控制试验流程,在PLC编程器中根据设定好的I/O点位编写相应的岸桥PLC控制程序,下载到PLC中,操作相关按钮,可在仿真画面上观察到相同的动作效果,即验证程序的正确性。
4 结 语
利用Flexsim三维动画仿真结合PLC硬件控制搭建起的虚实结合的实验平台,使港口装备的控制实验教学能够更好地开展,实验不再需要这类大型装备作为硬件支撑;通过逼真三维仿真,在考虑经济型、安全性以及实用性并保证必要功能的基础上,使得学生能够更直观地观察装备的结构特点以及控制效果,而不是像传统的PLC控制实验仅仅是观察电机的运行或者是相应的指示灯的亮灭来判断控制程序的正确性;另外虚实结合实验平台使用Flexsim软件和组态软件进行二次开发,具有很强的可扩展性,对其他一些难以开展的大型装备的PLC控制实验教学具有一定的借鉴意义。
[1] 杨 凯. 基于虚实结合实验室的电路原理实验[D]. 杭州:浙江大学, 2013.
[2] 邢大宁, 初良勇. 基于计算机仿真技术的物流实验室建设[J]. 航海教育研究, 2012, 29(1): 69-72.
[3] 李文光,董志彪,张亚娟.虚拟世界及其教育应用[J].电化教育研究,2008(11):16-20.
[4] 徐 明,刘海龙,张 敏. 三维虚拟实验教学资源管理平台[J]. 实验室研究与探索, 2013, 32(8): 276-279.
[5] 兰水华, 丁丽丽, 张宝军, 等. “虚实结合”实验教学模式的研究与实践[J]. 实验室科学, 2006 (3): 14-16.
[6] 龚达乐. 龙门起重机虚拟仿真系统建模开发[D]. 北京:北京化工大学, 2013.
[7] 张晓萍,刘玉坤. 系统仿真软件 Flexsim3.0 实用教程[M]. 北京:清华大学出版社, 2006.
[8] 邱建伟. 普通高校物流专业 Flexsim 仿真软件实践教学研究[J]. 物流科技, 2011, 34(11): 54-56.
[9] 百度百科.Flexsim[EB/OL].Baike.baidu. com[2015-3-30].
[10] 梅 奕, 王慧芬. 基于 WinCC 的电气控制技术课程辅助教学平台设计[J]. 中国高新技术企业, 2014, 36: 11.
[11] 赵明丽. 基于PLC和WinCC 的机械手运动仿真系统的设计[J]. 科技信息, 2012 (12): 106-107.
[12] 王莉莉,吴成华. WinCC6_0与Excel的数据通讯应用[J]. 水泥, 2015, 2(3): 58-59.
[13] 姚春光,潘卫明,徐殿国,等. 基于鼠笼式异步电机的风机模拟实验平台研究[J]. 电力电子技术,2010(6):23-26.
[14] 张 政,马 根,李 斌,等. 可重构星球探测机器人的OpenGL仿真实验平台研究[J]. 系统仿真学报,2005,17(4):885-888
[15] 倪妍婷,杨家伟. 基于ADAMS的机构创新设计仿真实验平台研究[J]. 机械设计与制造, 2009(7): 195-197.
On Experiment Platform of Port Equipment Control System Based on the Combination of Virtual with Actual Object
CAOXiao-hua1,XIAOYang2,CHENGXiang1
(1. School of Logistics Engineering, Wuhan University of Technology, Wuhan 430063, China;2. Science and Technology Unit, Tianjin Port CO., Ltd, Tianjin 437000, China)
The controlling experiments of port equipments could not be carried out properly due to the lack of appropriate equipment, so the concept of combination of virtual and actual object was proposed. Flexsim software was used to build the 3D simulation model of port equipment and was redeveloped to read and write Excel file. WinCC software was used to configure communication with PLC which realized the control and feedback signals transmission between PLC and Flexsim model by reading and writing Excel file. The Experiment platform broke the limit of equipment. It could offer us object models to do the experiments about port equipment and achieves 3D visualization of control process. The experience has a reference value for similar experiments.
experiment platform; Flexsim; combination virtual with actual object; port equipment
2015-09-10
交通部应用基础项目资助(2015329811290)
曹小华(1973-),男,湖北鄂州人,博士,教授,系主任,主要研究港口设备控制技术。
Tel.:15972143545;E-mail: tomm_cao@163.com
TP 319
A
1006-7167(2016)02-0074-04
猜你喜欢
金桥(2022年10期)2022-10-11
金桥(2022年10期)2022-10-11
小哥白尼(军事科学)(2022年8期)2022-09-20
环球时报(2022-05-26)2022-05-26
河北农机(2020年10期)2020-12-14
小哥白尼(趣味科学)(2020年6期)2020-05-22
当代工人(2019年20期)2019-12-13
凿岩机械气动工具(2017年2期)2017-07-19
海洋世界(2016年12期)2017-01-03
工业设计(2016年11期)2016-04-16
