
风力发电机变桨系统非线性自适应鲁棒控制
2016-12-20 07:19袁艳芳张京军高瑞贞
水力发电 2016年9期
袁艳芳,张 曦,张京军,高瑞贞
(河北工程大学,河北邯郸056038)
风力发电机变桨系统非线性自适应鲁棒控制
袁艳芳,张 曦,张京军,高瑞贞
(河北工程大学,河北邯郸056038)
针对风力发电机组在外界不定因素干扰下稳定性差的问题,通过自适应鲁棒控制方法,对风机功率输出稳定追踪问题进行了研究和验证。建立了具有不确定项的非线性数学模型,采用自适应鲁棒自调节的方法设计自适应律和控制器。实验证明风机系统在参数变化或受到外界干扰影响时,所设计的自适应控制器能使系统快速地追踪到期望曲线且比PID控制的精度高。
变桨系统;追踪控制;鲁棒自适应控制;控制器;风力发电机
因PID控制在结构和原理的设计上有着简单、易懂等优点,在风机的实际控制中得到了普及应用,PID控制是对线性系统的控制,而实际风力发电机组的变桨系统复杂且由风切变、塔影效应等引起的随机干扰,使系统表现出非线性特性,PID控制无法满足控制精度要求,因此,设计对风机系统参数未知或受到外界干扰时控制系统能适应对象和扰动动态特性变化的自适应鲁棒控制器很重要。为了实现风机的精确控制,国内外不少学者对风机非线性控制系统进行了研究,如文献[1]引入了滑模控制器,滑模控制对系统的不确定因素和随机噪声有有效的抑制作用,且对风机功率控制有很好的调节性能,但是滑模系统只适用于系统结构已知的情况;文献[2]通过引入级联式非线性控制方法对叶轮转速进行追踪控制,实现了对功率的最优控制,但抗干扰能力不强;还有文献通过引入自寻优、变结构的方法克服系统参数不确定或受干扰影响的因素,实现对风机的优化控制。
在考虑外界干扰和未知参数时,对风力发电机系统的变桨部分建立非线性数学模型,设计了能根据自身参数估计系统未知参数且实现对期望曲线追踪的自适应鲁棒控制算法。实验验证显示所设计的控制器能满足精度要求。
1 风能转换系统模型
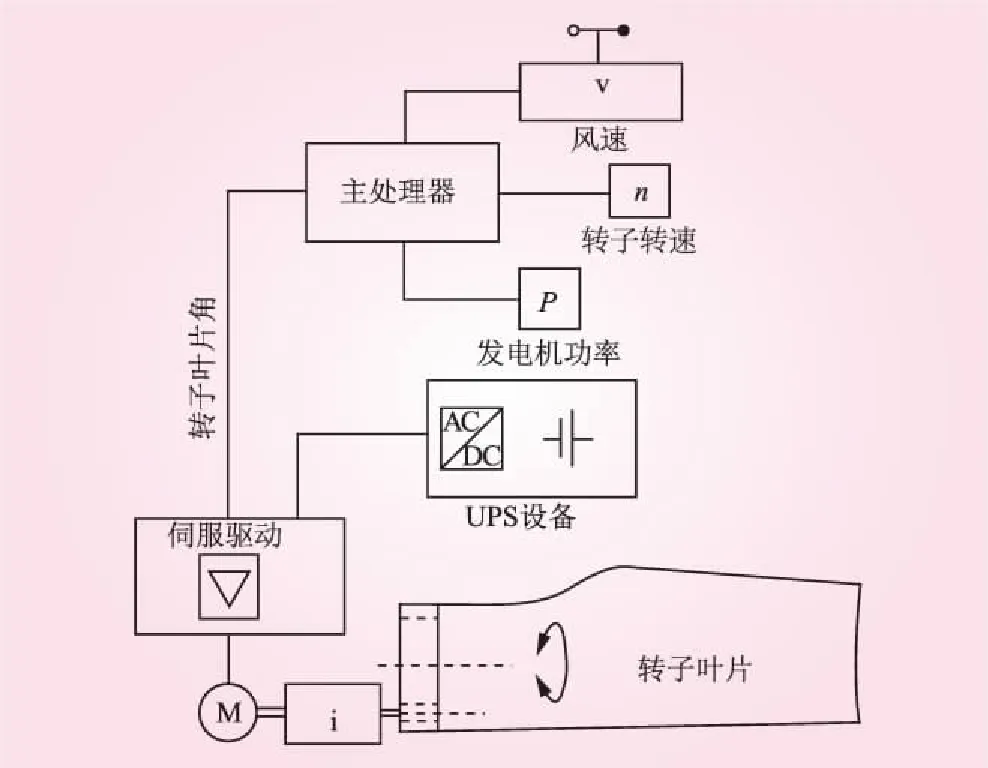
图1 变桨调节控制系统
根据Betz理论,气流流过理想风轮时最大的理论功率为0.593,但由于存在气流摩擦、叶片和机组振荡等能量,实际风能利用可表示为
(1)

风机的启动转矩是风速、风轮转速和桨距角之间的非线性函数,在稳定运行的某一点处近似线性函数可表示为[4]
(2)


变桨节制机构在运行过程中的动态变化可表示为[5]
(3)
式中,βr为设计的控制机构输入量;τ为时间常量。
急性胃肠炎是急腹症中的常见类型,近年来随着生活节奏的加快及饮食结构的改变使得急性胃肠炎的发生率逐年增长,临床上常表现为发热、腹痛、呕吐等症,若未进行及时治疗,将可能导致长狭窄、肛管炎、结肠癌等并发症,给患者的生命安全带来极大的威胁[1-2]。针对急性胃肠炎目前临床上常采用复方嗜酸乳杆菌、奥美拉唑等药物来调节肠道菌群、抑制病菌繁殖、保护胃黏膜等方式来缓解患者的临床症状,尽管具有一定成效,但单独应用临床疗效常不尽人意 [3-4]。本研究选取2015年8月—2017年8月我院600例急性胃肠炎患者为研究对象,探讨复方嗜酸乳杆菌联合奥美拉唑在急性肠胃炎治疗中的应用效果,现报告如下。
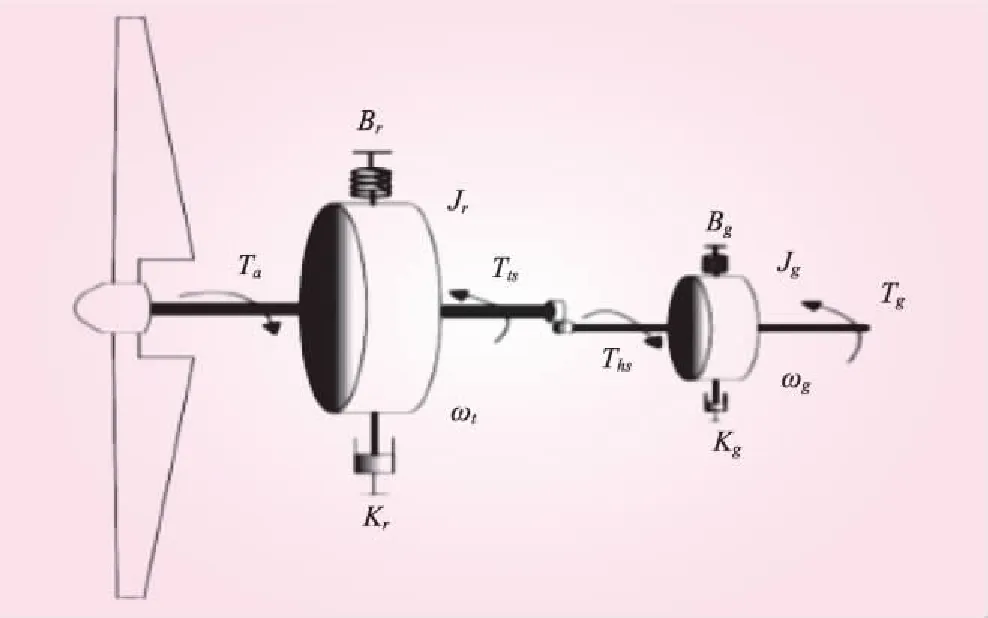
图2 风机的传动模型
图2中,Jr,Jg表示风轮转子和发电机转子的转动惯量,kg·m2;Ta表示风轮驱动转矩,N·m;Tg为发电机的电磁转矩,N·m;ωr,ωg为风轮机和发电机转子转速,rad/s;θr为转子扭转角;Br,Kr,Bg,Kg为传动链的阻尼和刚度;JM,JF表示传动系统低速侧主轴和尾旋部分的转动惯量。
分析转换系统并结合式(2)、(3),可建立数学模型为
(4)
式中,J包含风机的全部转动惯量,J=Jr+JM+n2(JF+Jg);Kt=Kr+n2Kg;n为齿轮箱传动比,可以看出整个风机的转动惯量具有不确定性。
动态系统转换模型可以表示为如下的非线性模型[4]
(5)


2 自适应鲁棒控制的设计
自适应控制是一种有自助调节能力的控制方法,能调节自己的参数来跟踪扰动和系统动态特性的改变,鲁棒控制是指系统在运行过程中遇到外界干扰时仍能保持一些性质的能力,风机控制系统中会受到外界的干扰及参数的不确定性使系统表现出强烈的非线性,对于这种节制系统,采用自适应鲁棒控制可达到很精准的控制要求。
由于传动系统中所包含的项具有不确定性,因此,非线性不确定系统可以描述为[6]
(6)
式中,u(t)为控制系统输入信号;Δ为包括干扰和模型不确定部分的总的不确定项。
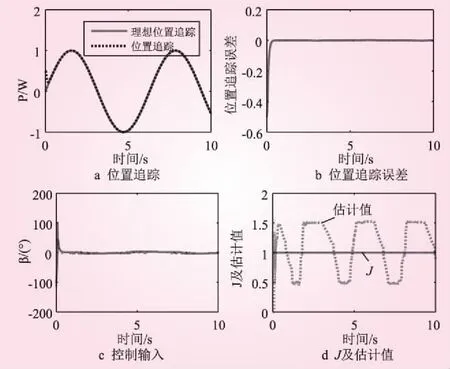
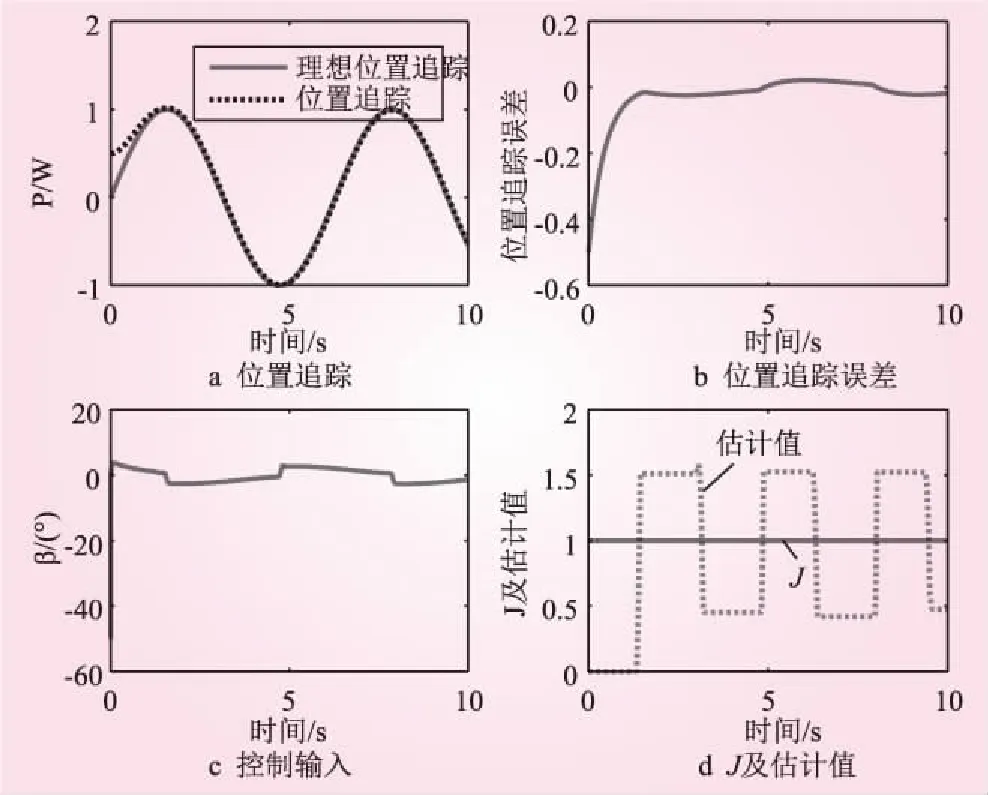
对于非线性系统,假设不确定参数J的上下界定义为J∈Ω={J:0 假设不确定项Δ有界,表示为 定义滑模函数[7]为 (7) 式中,e=θr-θd表示位置跟踪误差;θd为期望角度;c>0。 系统控制律设计为 (8) (9) 将式(9)进行求导计算,且将式(8)代回计算得 (10) 因此,取自适应律为 (11) 将式(8)、式(11)代入式(10)并对其分析可得 (12) 假设在风速改变时,风机变桨控制器的目标桨距角按图3所示正弦函数变化。当系统参数未知或有干扰时,为验证风机输出功率的自适应鲁棒性,控制器通过控制桨距角来追踪期望函数。 η=D+0.01=1.01。采用式(8)自适应鲁棒控制律,式(11)自适应律取,仿真结果如图3所示。图中M为自适应控制和PD控制的选择条件;N表示自适应律的取值条件。 图3 基于自适应律式(11)的仿真(M=1,N=1) 如果自适应律取式(12),则验证结果如图4所示。 图4 基于自适应律式(12)的仿真(M=1,N=2) 从仿真中可以看出自适应鲁棒控制可以很快的追踪到期望信号,追踪误差很快趋于0,但是自适应估计参数并未收敛于真实值,这是由于位置指令信号未能达到“持续激励”条件。为了证明自适应鲁棒控制的优越性,下面对PD控制实验验证,取kp=100,kd=50,实验结果如图5所示。 图5 基于PD控制的位置追踪仿真(M=2) 仿真结果表明PD控制也能快速追踪到期望 信号,但是参数估计出现了平顶现象,说明PD控制不能达到控制精度要求,综上,自适应控制鲁棒控制能更好的实现精度要求。 本研究对风力机PID线性控制不能满足实际非线性系统运行要求的问题进行了改进,通过建立非线性数学模型,研究出自适应鲁棒控制器,通过仿真表明自适应鲁棒控制算法能通过调节控制器内部参数完成对风机系统未知参数的估计,即使受到外界干扰,系统也能很快地追踪到期望曲线并且控制精度要高于PD控制;本研究下一步将针对实际风机运行情况进行研究,使理论设计更有实际意义。 [1]BELTRAN B, AHMED-ALI T, BENBOUZID M E H. High-order sliding-mode control of variable-speed wind turbines[J]. IEEE Transactions on Industrial Electronics, 2009, 56(9): 3314- 3321. [2]BELTRAN B, AHMED-ALI T, BENBOUZID M E H. Sliding mode power control of variable-speed wind energy conversion systems[J]. IEEE Transactions on Energy Conversion, 2008, 23(2): 551- 558. [3]吴忠强, 谢建平. 风力发电机自适应鲁棒保性能控制器设计[J]. 振动与冲击, 2013, 32(15): 95- 110. [4]何真, 龚春英. 变速风力发电机组的知识赢滑模变桨距控制[J]. 计算机仿真, 2013, 30(6): 121- 124. [5]刘金琨. 先进PID控制MATLAB仿真[M]. 北京: 电子工业出版社, 2011. [6]崔双喜, 王维庆. 风力机独立桨距角鲁棒自适应跟踪控制[J]. 中国电力, 2015, 48(6): 14- 19. (责任编辑 高 瑜) Nonlinear Adaptive Robust Control of Wind Turbine for Pitch System YUAN Yanfang, ZHANG Xi, ZHANG Jingjun, GAO Ruizhen (Hebei University of Engineering, Handan 056038, Hebei, China) In view of the problem of poor stability of wind turbine in the case of external interference, the adaptive robust control method is used to study the power output stable tracking problem of variable-speed wind turbine. The nonlinear mathematical model with uncertain terms is established and the adaptive law and the controller are designed by using the method of adaptive robust control. The experiments show that the designed adaptive controller enables the system to quickly track the expected curve and has high accuracy than PD control when the system parameter is changed or the system is interfered by external factor. variable-speed system; tracking control; adaptive robust control; controller; wind turbine 2016- 05- 14 袁艳芳(1990—),女,河北邯郸人,硕士研究生,主要研究方向为风力发电机组的控制策略. TM614 A 0559- 9342(2016)09- 0104- 04


3 仿真验证

4 结 论
猜你喜欢
云南画报(2022年4期)2022-05-05
通信电源技术(2020年17期)2020-12-28
哈尔滨轴承(2020年1期)2020-11-03
自动化学报(2019年6期)2019-07-23
中学课程辅导·教学研究(2017年11期)2017-09-23
厦门理工学院学报(2016年1期)2016-12-01
北京航空航天大学学报(2016年7期)2016-11-16
系统工程与电子技术(2016年4期)2016-08-24
通信电源技术(2016年1期)2016-04-16
人间(2015年20期)2016-01-04
