
基于雷达和加速度传感器的动车测速系统
2016-12-17 08:04葛锁良
合肥工业大学学报(自然科学版) 2016年11期
葛锁良, 汪 晗
(合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
基于雷达和加速度传感器的动车测速系统
葛锁良, 汪 晗
(合肥工业大学 电气与自动化工程学院,安徽 合肥 230009)
在动车运行过程中,速度和位置是保障其安全的重要数据。文章根据动车测速的要求,设计了一种雷达测速和加速度传感器测速协同工作的系统,雷达测速依据多普勒原理直接计算得到动车相对于地面的速度,加速度传感器可以监测雷达是否正常,在雷达测速的盲区,利用加速度传感器测得动车的加速度数据,通过加速度的积分得到速度值,雷达测速和加速度传感器测速相互补充。利用数字信号处理(digital signal processing,DSP)对测量数据进行处理,通过通用异步收发传输器(universal asynchronous reciver/transmitter,UART)将更可靠的速度值发往上位机。实验证明,该测速方式在复杂的铁路环境中能长期稳定地运行,满足全天候、实时性要求,在保障动车安全运行方面发挥重要作用。
多普勒雷达;加速度传感器;动车测速;数字信号处理
随着动车速度的不断提高,对动车安全运行的要求越来越高。在动车运行过程中,必须实时掌握动车车速和位置,才能正确控制动车的启动、加速、减速和停止,做出及时有效的决策,尽量避免可能发生的事故,以保障动车安全运行。
按照动车测速的原理,动车测速装置可分为转动测速装置、全球定位系统(global positioning system,GPS)定位测速装置和雷达测速装置。转动测速是测量车轮的转速,间接得到动车的运行速度,测量方式简单易行,但是精度不高,而且在动车不可避免地空转打滑时得不到正确的速度值;卫星定位装置是一种基于GPS的直接测量方式,精度高、实时性好、设备简单,不可避免地是在山区、隧道等区域无法接收GPS信号而产生信号盲区,而且GPS是间接测速;多普勒雷达测速是依据多普勒原理,直接计算动车相对于地面的速度值[1],基本能满足全天候、实时性要求。但是由于某种原因(如轨道积水、表面覆冰)接收不到回波信号[2],在短时间内失去速度值。这时利用加速度传感器就可以在原来速度测量的基础上继续显示速度值并保证精度。本文采用多传感器信息融合技术[3],使用雷达测速装置和加速度传感器相互补充的方式测量车速,满足高精度实时采集动车速度信号的要求,保障动车安全运行。
1 测速系统总体结构
在实际的动车测速中,测速系统放置在车底,其工作温度范围为-20~+50 ℃,动车加速度绝对值不大于5 m/s2,对测速系统的要求是速度范围为0~350 km/h,速度值精确到1 km/h,1 s内输出50个速度值。依据多普勒效应,电磁波的接收者与电磁波的发出者之间存在相对运动时,接收到的频率与原发射频率不相等,且频率差与相对运动的速度保持一定的关系,计算公式为:
fd=2vf0/c
其中,c为光速,即3×108m/s;v为目标运动速度;f0为发射波频率;fd为多普勒频率。上述为多普勒雷达测速系统的基本原理[4]。
加速传感器以较高的频率输出被测对象的加速度信息,在被测对象的初速度已知的情况下,通过对加速度的积分可得实际速度值,因为这种积分是将离散数据连续化,不可避免地带来误差,且误差随着积分时间变长而变大,不能长时间单独使用。所以数字信号处理(digital signal processing,DSP)对接收的雷达信号和加速度信号处理后将更加可靠的速度值发往上位机。
雷达持续向地面发射恒定频率的电磁波,并接收经地面反射后的回波,经雷达计算得到速度值,将速度值以频率信号输入DSP的通用输入/输出(general purposeinput output,GPIO)。测速系统结构,如图1所示。
DSP通过I2C协议访问加速度传感器得到加速度,加速度在时间上的积分即为该时间段内的速度差。DSP对得到的多个速度信息经过判断后通过通用异步收发传输器(universal asynchronous receiver/transmitter,UART)发送到上位机[5]。
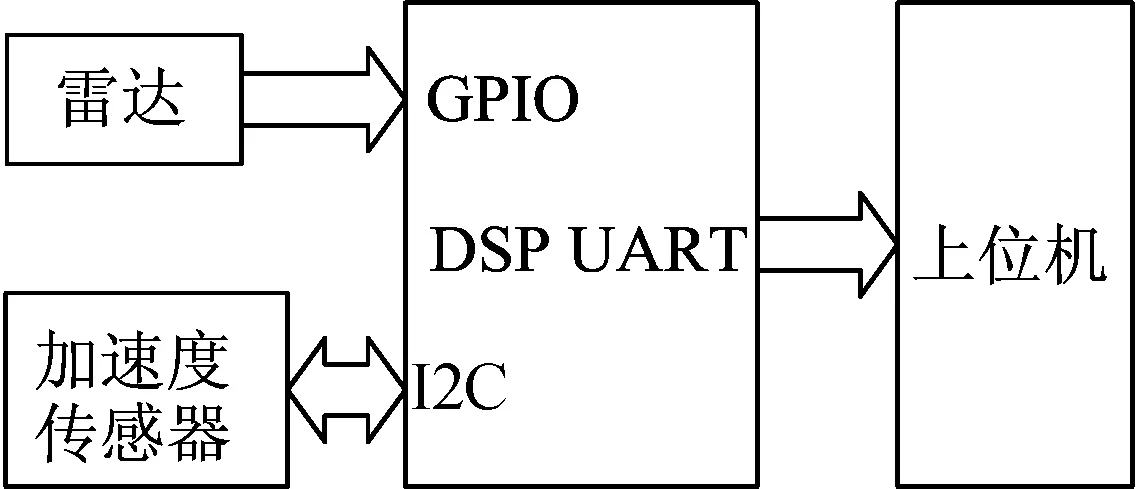
图1 测速系统结构
2 硬件设计
本系统选用德国DRS05高精度多普勒雷达直接测量速度,该雷达以其测速范围大,精度、灵敏度和可靠性高的优点在测速方面得到广泛应用。DRS05采用双天线设计,能有效提高雷达对信号的采集能力;其使用温度为-30 ~+70 ℃,满足动车从南到北的使用;测速最高可达600 km/h,囊括了动车行驶的全部速度范围;速度误差小于0.4 km/h;脉冲输出更新时间为1 ms。选用ADI公司的ADXL345加速度传感器采集加速度信号。ADXL345是一款高精度、超低功耗的数字加速度计,可选的测量范围为±2g、±4g、±8g、±16g,在3轴上分辨率都高达3.9 mg/LSB,最大输出速率3 200 b/s,可以通过串行外设接口(serial peripheral interface,SPI)或I2C访问;工作温度范围为-40~+85 ℃,抗冲击能力达到10 000g[6]。
ADXL345测量范围大,精度高,工作温区广,能够满足系统测量加速度的要求。加速度传感器的接线如图2所示,加速度使传感器内部惯性质量偏转、差分电容失衡而输出与加速度成正比的幅度。DSP通过Pin13、Pin14以I2C协议访问加速度传感器,获取加速度值。

图2 加速度传感器原理
DSP作为整个测速系统的核心,需要对雷达和加速度传感器的数据采集以及将最后的结果发往上位机。选用Analog Device公司的Blackfin(BF)系列的ADSP-BF506F DSP,采用了新结构的MSA,允许同时进行算法处理和实施复杂的控制方案;采用类精简指令集的寄存器和指令模式,且具有丰富的外设资源。BF506F高达400 MHz内核频率和最高100 MHz的系统频率使其在程序运行方面表现优异;包含2个高达2 MSPS 的12位ADC,每个模数转换器(analog-to-digital,ADC)有6个通道,并加入一种新的外设ADC控制模块(ACM),使ADC采样在低开销的同时精确度与外部事件同步;8个32位计时器,计时精度为10 ns时,单次最长计时时间超过40 s;也包含2个UART,1个I2C控制,35个可复用GPIO端口[7]。
3 软件设计
Visual DSP++5.0 是ADI针对ADSP处理器的开发提供的软件工具,根据其DSP特点,可以选择对生成的汇编代码进行优化,调整后的指令集适于高密度编码,占用存储空间小[8]。VDK(visual DSP kernel)是ADI公司为更合理使用其DSP硬件而开发的实时操作系统(real time operating system,RTOS)内核。开发人员使用VDK的系统服务可以简单地与内核进行多种方式的交互[9]。在Visual DSP++5.0的集成开发环境中可以同时查看编辑窗口、输出窗口、反汇编窗口、跟踪变量、堆栈等,还提供了高级的图画功能,可实现观察数据结果的可视化[10]。DRS05雷达持续输出频率信号,速度每增加1 km/h,频率增加69.44 Hz。根据测速系统要求,DSP需要测量频率范围为0.001~25 kHz,只需将雷达输出的频率信号准确测量,即可算出由雷达测得的速度值。
DSP每20 ms就要刷新一次频率值。为保证测量精度,在输入频率较低(如100 Hz)时,采用测量每次边沿跳变的时间间隔为半个周期,在频率较高(如10 kHz)时,直接检测20 ms内波形的双边沿跳变次数为周期数的2倍。经过实验证明,这种方式在低频时误差为0.5 Hz,高频时误差为3 Hz,满足测速精度要求。
在系统上电初始化完成后,DSP一直接收雷达的频率信号和加速度传感器采集到的信号,定时器每20 ms产生一次中断。中断子程序如图3所示,在中断中读取雷达最新的速度值和加速度传感器在过去20 ms的所有值,以上一次输出速度值为初值,通过积分换算为速度值,以加速度传感器的速度值检验雷达速度值是否可信,2种方式得到的速度之差是否在可接受范围内;若可信,则通过UART输出雷达测得的速度值并保存此速度值,供下次计算;若不可信,则输出通过加速度传感器得到的速度值,显示雷达工作异常,也保存此速度值。
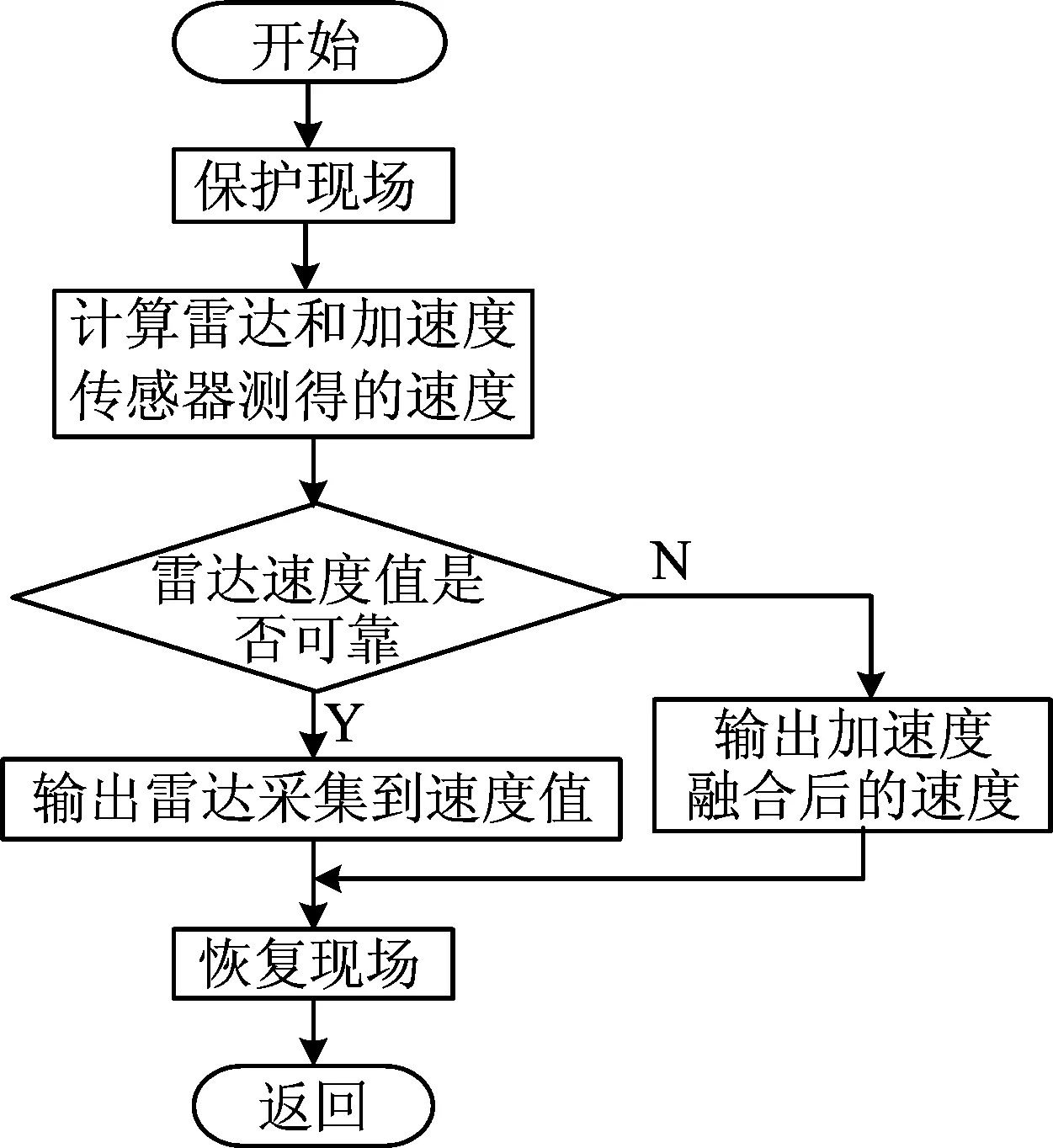
图3 20 ms中断流程
4 实验结果
雷达正常工作时输出的速度值可以认为是实际车速。在确保雷达正常工作时,以雷达输出速度为准确值,检验在初速度已知的情况下加速度传感器输出的速度值是否能在较长时间内保持相对雷达测速的较好精度。选择整体路况较好的郑州至武汉铁路线,以某和谐号动车组为实验对象,实验当天天气晴朗,室外气温为10~20 ℃。在实验中,选择一段平直无桥路段以保证雷达一直正常工作,某一时刻给出速度值后,各自独立工作。车速较低时,各自独立输出速度值如图4所示,车速较高时,各自独立输出速度值如图5所示。加速度传感器均已知起始时刻速度。

图4 低速测量
由图4、图5可以看出,加速度传感器测得的速度值与雷达测得的速度值最大差值不超过0.6 km/h,加速度传感器可独立工作超过300 s,满足雷达盲区的时间要求。
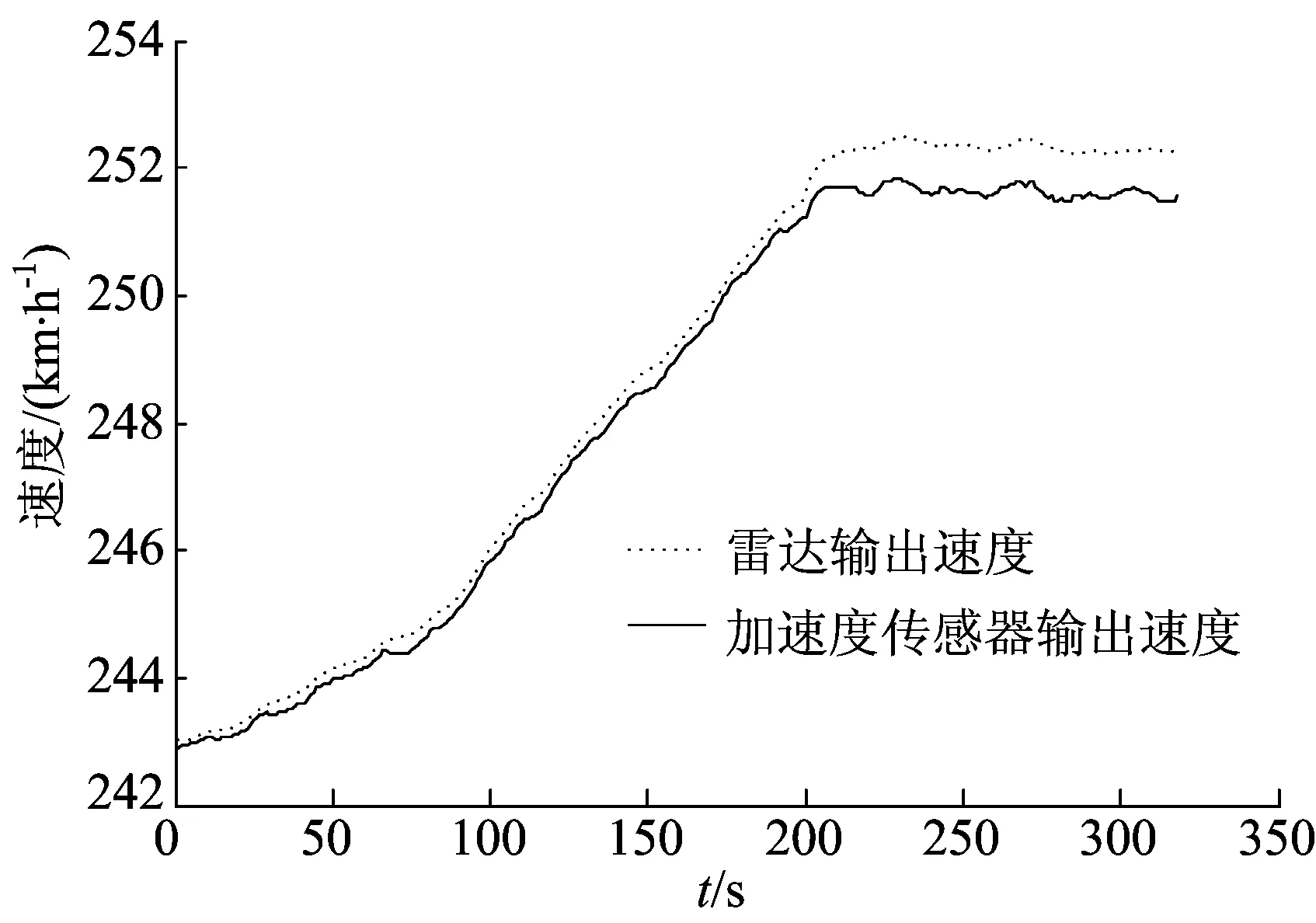
图5 高速测量
5 结 论
本文提出了的基于雷达测速和加速度传感器测速的动车测速系统。实验证明,该测量装置性能稳定,能适应复杂的路段和天气,有力地保障动车的安全,必将取得更加广泛的应用。
[1] 杨蓉.多普勒雷达测速系统设计及信号处理方法研究[D].武汉:华中科技大学,2012.
[2] 孙超.脉冲多普勒雷达测速关键问题研究[D].西安:西安电子科技大学,2014.
[3] 何友,王国宏,彭应宁,等.多传感器信息融合及应用[M].北京:电子工业出版社,2010:1-5.
[4] 任慧麟.基于DSP与FPGA的雷达测速系统研究[D].武汉:华中科技大学,2012.
[5] 陆晶晶,张为公,周耀群.基于GPS和加速度计的车速测量系统的开发与研制[J].测控技术,2007,26(8):15-16,18.
[6] Analog Devices Inc.3-axis digital accelerometer ADXL345 data sheet[EB/OL].[2015-03-06].http://www.analog.com/en/products/mems/accelerometers/adxl345.html#product-overview.12,2014.
[7] Analog Device Inc.ADSP-BF506F datashee and product info[EB/OL].[2015-03-06].http://www.analog.com/media/ cn/technical-documentation/data-sheets/ADSP_BF504_BF506_BF506F.pdf.3,2015.
[8] Analog Devices Inc.Visual DSP++ 5.0 assembler and preprocessor manual[EB/OL].[2015-03-06].http:// www.analog.com/media/en/dsp-documentation/software-manuals/50_asm_mn_rev_3.4.pdf 5,2010.
[9] Analog Devices Inc.Visual DSP++ 5.0 device drivers and system services manual for Blackfin processors[EB/OL].[2015-03-06].http://www.analog.com/ media/en/dsp-documentation/software-manuals/50_ddss_mn_rev_4.3.pdf.11,2011.
[10] 刘书明,罗军辉.ADSP SHARC系列DSP应用系统设计[M].北京:电子工业出版社,2003:297-299.
(责任编辑 张 镅)
Velocity measurement system based on radar and acceleration sensor for EMU
GE Suoliang, WANG Han
(School of Electric Engineering and Automation, Hefei University of Technology, Hefei 230009, China)
In Electric Multiple Unit(EMU) running process, velocity and position data are important to ensure its security. According to the requirements for EMU velocity measurement, a kind of velocity measurement system based on Doppler radar and acceleration sensor is developed. The radar can obtain the velocity of EMU relative to ground directly with Doppler principle. The acceleration sensor can monitor the working state of the radar. In radar dead zone, the value of velocity can be obtained by integrating the acceleration values measured by the acceleration sensor. The radar and acceleration sensor can complement each other. The data is processed by the digital signal processing(DSP) and more reliable velocity value is sent to the host computer through the universal asynchronous receiver/transmitter(UART). The experimental results show that this system can run stably for a long time in the complex railway environment, meeting the full-time and real-time requirements. It can play an important role in guaranteeing the EMU security.
Doppler radar; acceleration sensor; Electric Multiple Unit(EMU) velocity measurement; digital signal processing(DSP)
2015-04-25;
2015-06-25
葛锁良(1964-),男,江苏丹阳人,合肥工业大学副教授,硕士生导师.
10.3969/j.issn.1003-5060.2016.11.012
TP212.9
A
1003-5060(2016)11-1498-04
猜你喜欢
中国临床医学影像杂志(2022年5期)2022-07-26
当代水产(2022年6期)2022-06-29
军事文摘(2021年18期)2021-11-25
北京航空航天大学学报(2021年9期)2021-11-02
数学小灵通·3-4年级(2020年11期)2020-12-14
小哥白尼(趣味科学)(2019年10期)2020-01-18
汽车观察(2018年12期)2018-12-26
金桥(2018年4期)2018-09-26
劳动保护(2018年8期)2018-09-12
学苑创造·A版(2018年12期)2018-03-04
