
无缝内衣机控制系统设计
2016-12-16 07:38许少宁
现代纺织技术 2016年6期
许少宁,汝 欣
(1.浙江省机械工业情报研究所,杭州 310009;2.浙江省机械工程学会,杭州 310009;3.浙江理工大学机械与自动控制学院,杭州 310018)
无缝内衣机控制系统设计
许少宁1,2,汝 欣3
(1.浙江省机械工业情报研究所,杭州 310009;2.浙江省机械工程学会,杭州 310009;3.浙江理工大学机械与自动控制学院,杭州 310018)
无缝内衣机作为一种典型的圆型纬编针织机械设备,专门用于生产无缝针织服装。目前高档无缝针织设备主要依赖进口,国内无缝内衣机起步较晚,电脑控制系统在功能、可靠性及稳定性等方面有待提升。通过对无缝内衣机机械结构、编织工艺及控制需求进行分析,提出无缝内衣机控制系统人机交互层、实时控制层和驱动层的三层结构总体设计方案,阐述了控制系统硬件、软件的设计思路。实时控制层通过FPGA芯片内部逻辑电路搭建双口RAM的架构实现人机交互层与实时控制层的数据传输。通过对控制系统整体功能的测试分析,验证了系统设计方案的可行性。测试结果表明,控制系统整体运行可靠、实时性好。
无缝内衣机;控制系统;硬件设计;软件设计
无缝针织技术是采用专用无缝设备生产一次成形衣物的技术。它可根据服装造型的需求设计织造过程与进度,以连贯的过程织出服装所有部位的立体效果,从而得到一件完整的衣服。
无缝针织的概念源于20世纪80年代,生产设备改造自袜机,之后逐步向内衣及其他种类服装延伸。无缝内衣机采用无缝针织技术,该技术生产的织物仅需简单的裁剪缝合便能制成成衣,可避免大量的裁剪、缝合工序,能有效节约生产时间、降低生产成本。经过多年的发展,无缝针织设备历经了半自动、全自动到如今的智能控制的变革[1-2]。国外著名的无缝内衣机生产厂商有意大利Santoni、Sangiacomo等公司,其产品采用全成形编织技术、单面扎口技术、高速选针技术、张力控制技术等高新技术[3-4],产品在纱线适性、整机功能等方面有很大优势[5]。国内无缝内衣机厂商也不断推陈出新,如高腾机电自主开发了GD-NJ08无缝内衣机,浙江日发纺机开发了RFSM10无缝内衣机等。
虽然近年来国内无缝内衣机技术迅猛发展,但由于国内无缝针织技术起步较晚,在各方面仍与国外无缝针织设备存在一定差距,特别是作为无缝内衣机运行的核心——电脑控制系统,不仅在功能上有所欠缺,可靠性及稳定性等方面也有待提升[6]。因此,研发高效、稳定、智能化的无缝内衣机控制系统,提升我国针织工业实力,打破国外无缝内衣机的技术垄断是当务之急。
1 无缝内衣编织机构及编织工艺分析
一套完整无缝内衣机设备由机械设备、控制系统、制版软件三部分构成。控制系统根据制版系统生成的花型文件控制机械设备各部件动作,从而完成编织过程。电脑控制系统的设计,依赖于无缝内衣机机械结构和编织工艺分析。通过分析,可以确定无缝内衣机控制系统控制需求,并据此设计总体方案。
电脑无缝内衣机使用电子选针器作为选针装置,通过选针器刀片的打上/打下实现选针功能。当选针器刀片打上时,对应位置的针被压入针槽,不能沿三角轨道上升,无法达到编织高度。当选针器刀片打下时对应位置的针与刀片不接触,选中的针可沿着三角轨道上升,达到编织高度,进行编织。如图1所示。
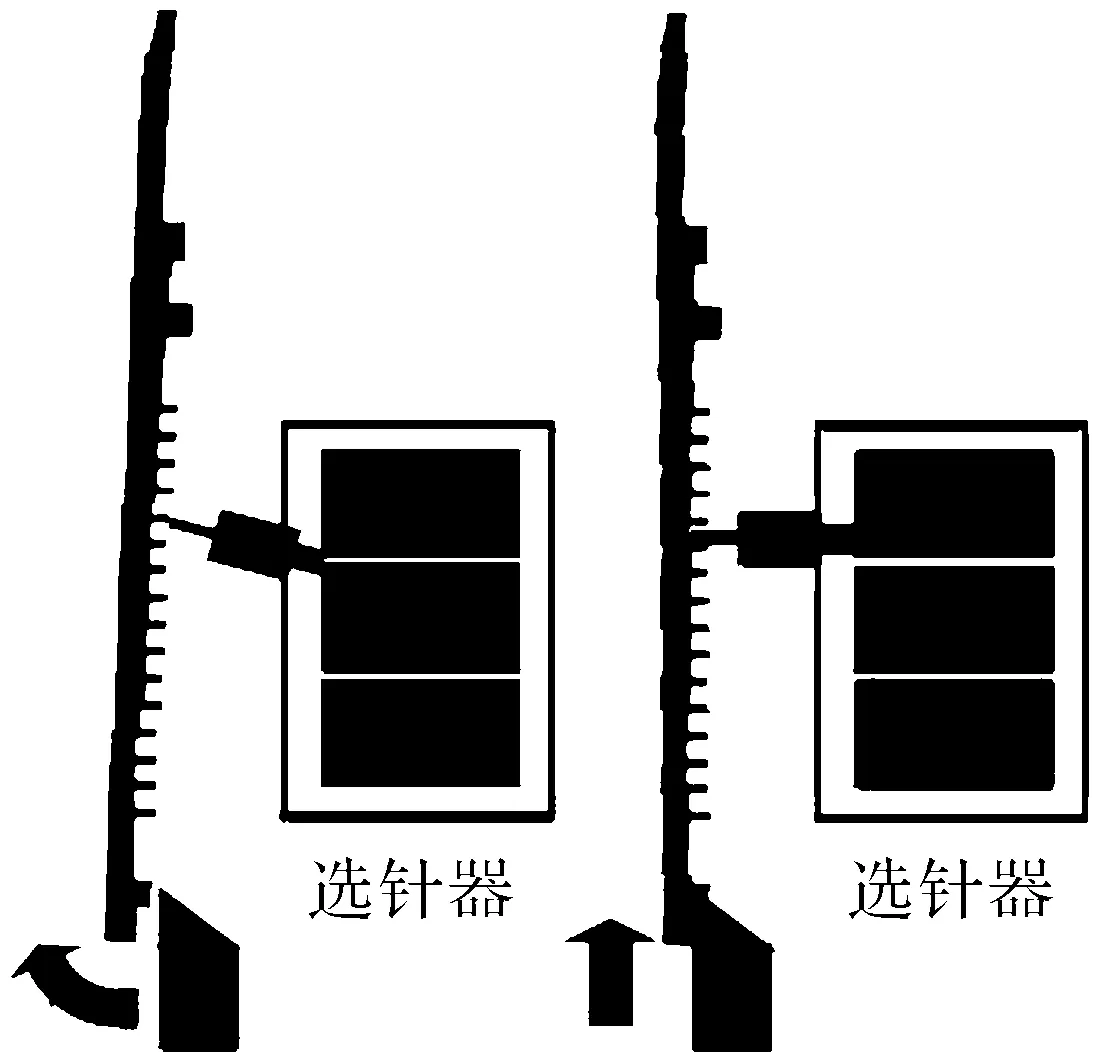
图1 电子选针
图2为无缝内衣机三角装置展开简化后的三角系统图,其黑色标示的三角为可动三角,由电磁阀或步进电机驱动。
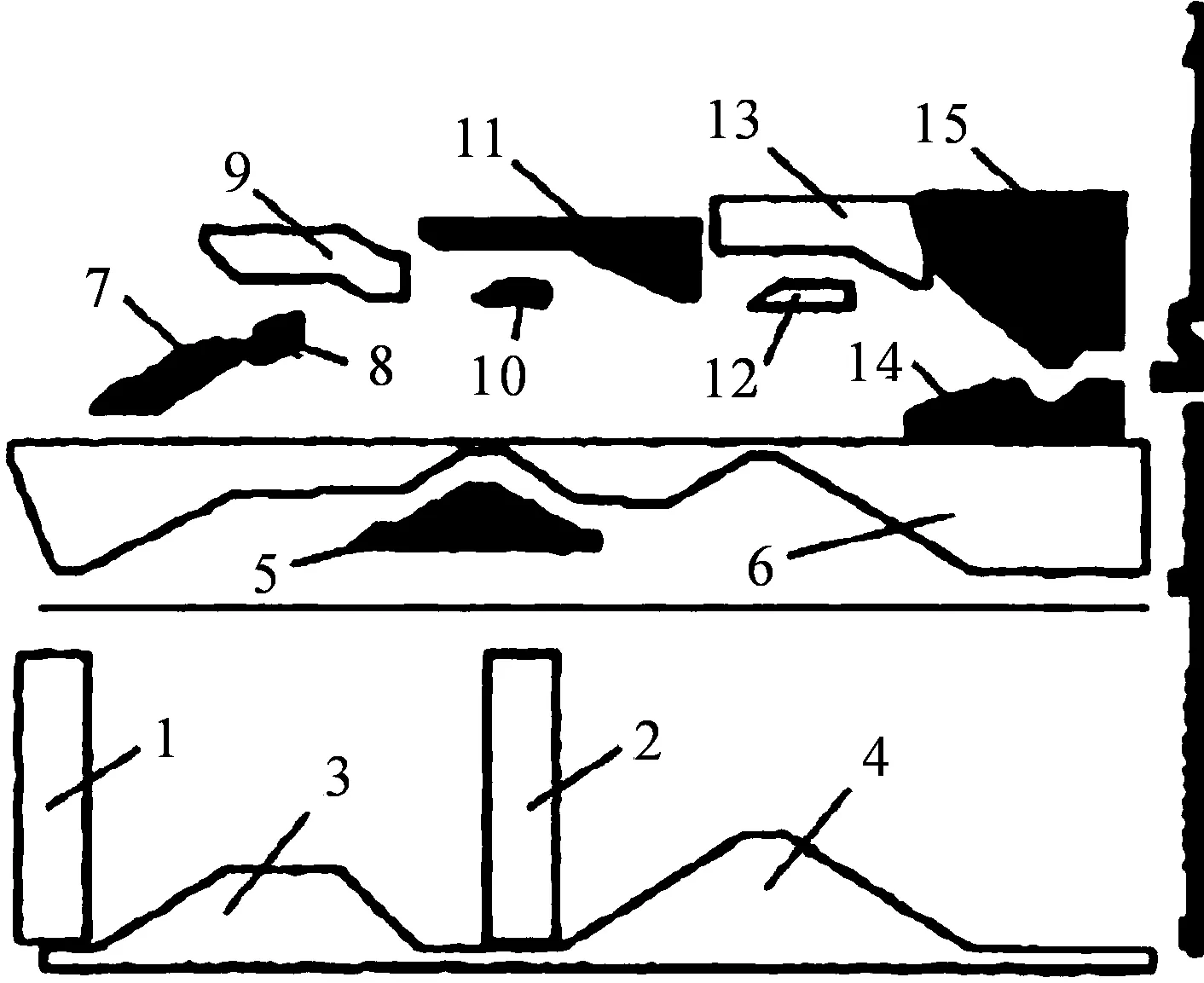
1、2.选针器,3、4选针片三角,5、6中间片三角,7-15舌针三角图2 无缝内衣机三角展开
图2中1、2为选针器,3、4为选针片三角,当选针片被选中时则沿着固定三角3、4运动。选针三角3比4略低,当选针片运动到3时为集圈高度,运动到4为退圈高度。5、6为中间片三角,其中6为压针中间片三角,5为顶针中间片三角。当三角5参与工作时,中间片沿其轨道上升,将之前已经运动到集圈高度的舌针继续顶高到退圈高度。7~15为舌针三角,在选针片不被选中的情况下,它们为舌针运行提供轨道,从而完成相应编织。7为集圈舌针三角;8为退圈舌针三角;10~12为收针舌针三角;14、15为成圈三角也叫密度三角,舌针在14与15三角形成的轨道中下降成圈[7]。
2 无缝内衣机控制系统总体方案设计
对无缝内衣机械机构及编织工艺分析可知,无缝内衣机的控制系统需要实现选针器、步进电机(密度调节以及风向转换电机)、电磁阀(包括三角气阀以及剪刀气阀的控制)、伺服电机(针筒以及哈夫针盘的驱动)、送纱装置、各类传感器等装置的控制。
无缝内衣机控制系统总体方案如图3所示。系统采用模块化的设计思路,将整个控制系统分为人机交互层、实时控制层以及驱动层三层。人机交互层与实时控制层之间通过FPGA数字逻辑处理单元实现数据交互,实时控制层使用工业现场总线技术控制驱动层各个单元[8]。
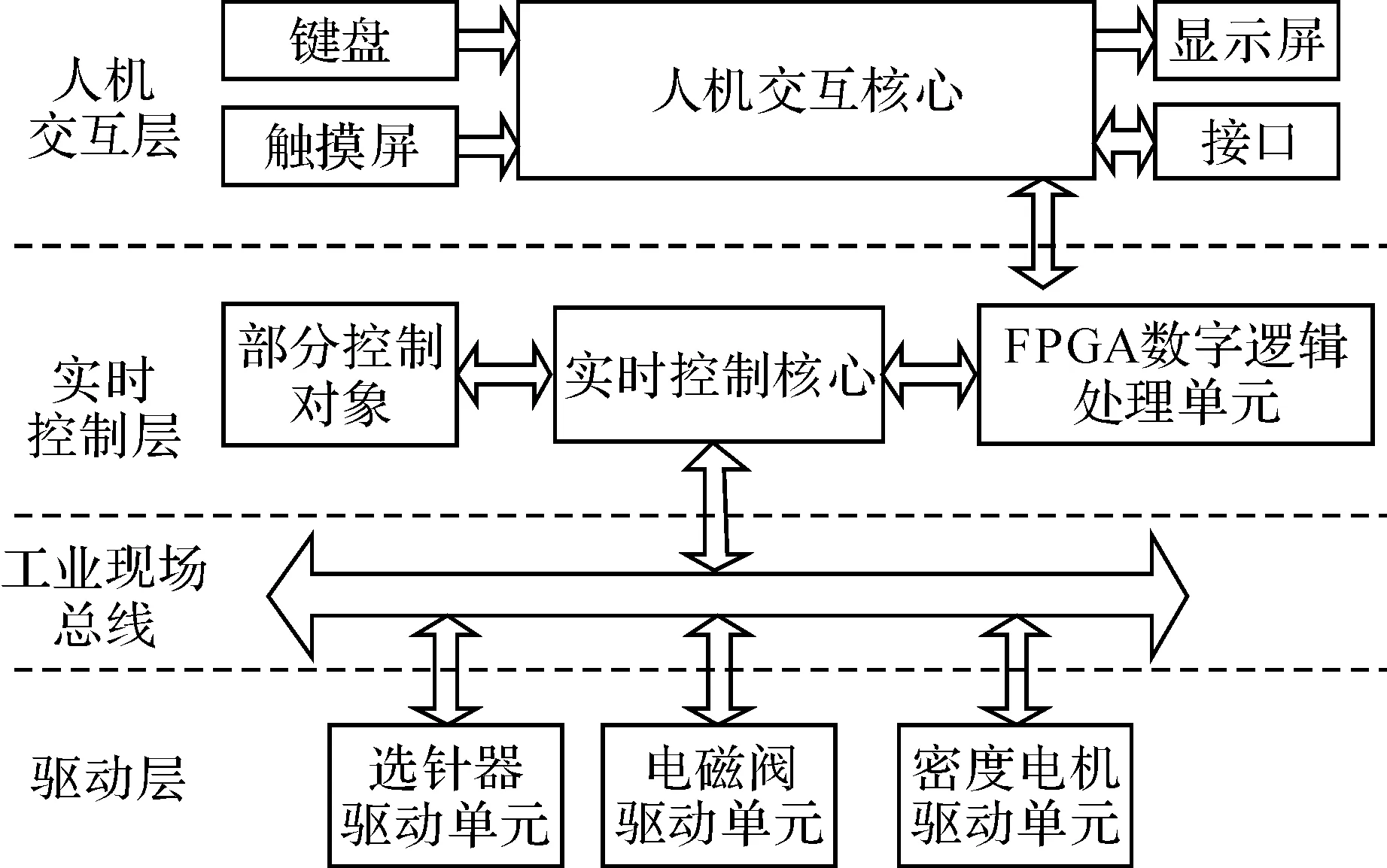
图3 无缝内衣机控制系统总体方案
2.1 人机交互层
人机交互层主要提供一个图形化交互平台,实现用户与设备间的信息交换。系统的输入设备为键盘、触摸屏,用户通过输入设备操作控制系统。输出设备为显示屏,对设备状态、运行参数等实时显示,对用户的操作进行反馈。除最基本的交互功能外,鉴于嵌入式控制系统资源有限,人机交互层需具备存储功能,能对花型文件、系统参数、编织参数等数据进行存储,节约实时控制层的系统资源。人机交互层还需与实时控制层进行交互,这就需要与实时控制层之间的数据交互功能。此外,为满足设备联网需求,需预留以太网或其他网络接口。
依据以上功能需求分析,人机交互层硬件采用核心板结构,将处理器、存储器及引脚整合在一块板上,通过引脚与底板连接。该结构具备一定的通用性、可互换性,便于系统的开发、维护。人机交互层软件采用基于定制Windows CE 6.0操作系统的应用程序,配备8.0寸液晶显示及电阻触摸屏,操作便捷。采用FPGA数字逻辑处理单元与实时控制层进行数据交换。
2.2 实时控制层
实时控制层是整个无缝内衣机控制系统的核心模块,该模块不仅需要对人机交互层发送的花型文件、控制指令进行解析,还需与人机交换层、驱动层进行数据交换。实时控制层最核心的功能是对执行器进行控制,包括针筒伺服电机、密度电机、气阀等,还需对运行过程中由传感器采集来的报警信息、开关的输入信息、人机交互层的操作信息等进行处理。
实时控制层承担着大量的运算及控制任务,因此配备FPGA、ARM实时控制层的双核心架构。以ARM为核心的主控制单元来完成运算及其他部分的控制,以FPGA为核心的数字逻辑处理单元主要作为与人机交互层的通讯媒介及承担部分的控制任务,通过工业现场总线对驱动层发送控制指令。
2.3 驱动层
驱动层包括了选针器控制驱动单元、电磁阀控制驱动单元、密度电机调密驱动单元等。实时控制层通过工业总线对选针器、三角气阀、剪刀气阀等执行器件发送控制指令,驱动层将执行状况反馈至实时控制层。
现阶段常用的总线方案有CAN总线、RS485总线、工业以太网总线等。鉴于选针器、电磁阀在内衣机工作过程中对控制频率的要求较高、控制功能较为单一,选用RS485总线与实时控制层通讯。而密度电机使用频率较低,控制功能比较复杂,因此选用CAN总线与实时控制层进行通讯。
3 无缝内衣机控制系统硬件设计
3.1 人机交互层硬件设计
人机交互层的硬件设计仍然采用模块化的设计思路,整个硬件电路由核心板(包括CPU、存储器及引脚整合)、外围电路(通讯接口等)和输入输出(液晶屏、液晶电源、液晶背光、触摸屏)三大模块构成。硬件部分整体结构如图4所示。
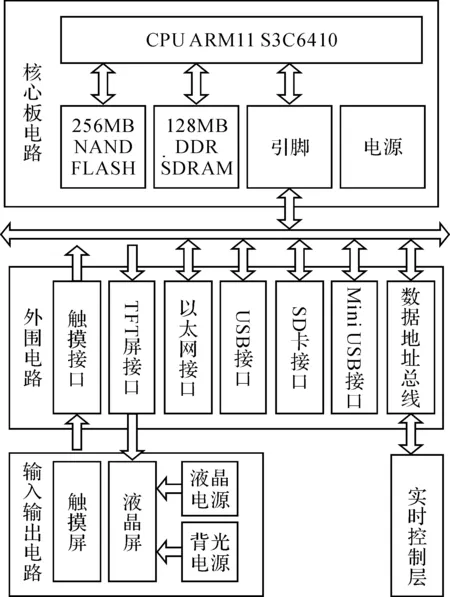
图4 人机交互层硬件设计方案
3.2 实时控制层硬件设计
采用双核心结构的实时控制层硬件框图如图5所示。以FPGA为核心的部分除负责实时控制层与人机交互层之间的通讯外,还处理传感器、输入信号并通知以ARM为核心的控制单元。ARM芯片负责花型解析,同时实现一路伺服电机的控制、多路传感器信号的处理、按钮和指示灯的处理以及对驱动层的控制等任务。
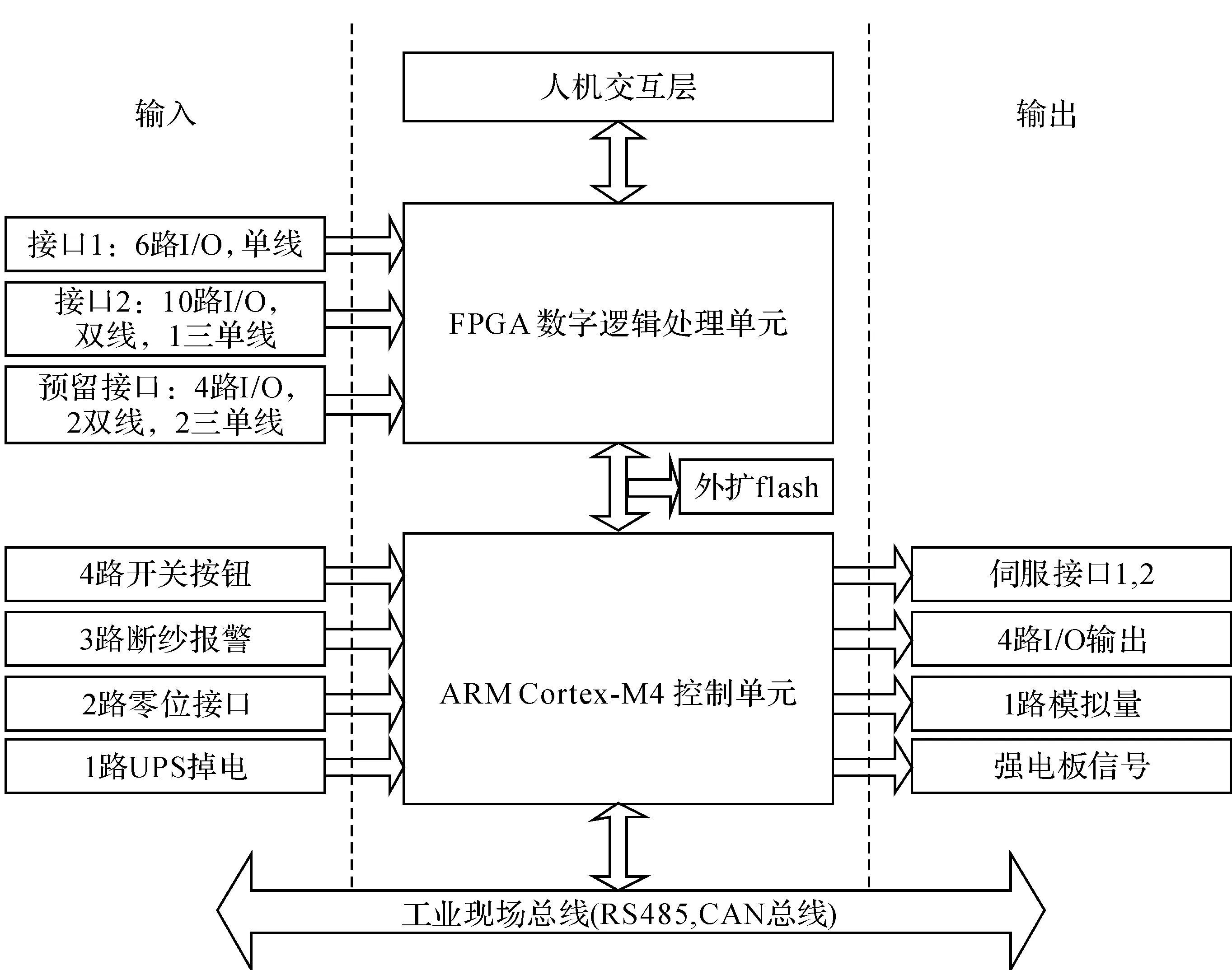
图5 实时控制层硬件设计方案
核心ARM芯片选择意法半导体公司的STM32F407ZET6,具备ARM公司设计的Cortex-M4核心,内建浮点运算单元(FPU)以提供中低阶DSP应用所需,且芯片运行频率能够达到168MHz,可以满足花型文件的运算以及大量需要极高实时性任务的需求。
FPGA主要作为人机交互层与实时控制层的通讯媒介,其控制功能仅是对输入的传感器信号进行判断并将其发送至STM32F407芯片,而考虑到系统整体成本等问题,选用Altera公司的最小规模FPGA芯片EP4CE6。
4 无缝内衣机控制系统软件开发
4.1 人机交互应用程序开发
人机交互层应用程序主要需实现监控、测试、设置、交互四大功能,如图6。

图6 人机交互层应用程序结构
监控功能包括设备运行数据、报警信息的实时监控。设备运行数据包括针筒转速、当前针位、当前编织花型等。报警信息包括断纱、漏针、撞针报警等。
测试功能包括电机、选针器、电磁阀、其他I/O测试。测试功能一般在新机装机完成、执行部件进行更换等需要对执行部件进行测试的情况下使用。
设置功能分为设备编织参数、系统参数设置两部分。编织参数包含设备编织过程中需要明确的所有参数,包括运行速度、点动速度、选针器起始角度等。系统参数是电脑控制系统的参数,包括系统时间、用户密码等。
交互功能包括与操作者的交互功能及与实时控制系统的交互功能。系统通过液晶显示、触摸屏、USB接口等输入输出设备实现与用户交互,通过FPGA的RAM作为共享内存与实时控制层进行数据交互,包括花型文件及控制、报警等指令的传输。
系统中的监控、设置与测试三个功能在无缝内衣机运行过程中不会同时使用,是互斥的关系。而交互功能与其他三个功能息息相关,在监控、设置与测试的各自运行中都存在交互过程。交互过程中,由用户操作而人机交互层发送指令、数据,为主动方式,可在各界面中等待用户操作后发送指令、数据。人机交互层接收数据为被动方式,需监听实时控制层发送到人机交互层的数据和指令,因此需在人机交互层单独建立一个实时层数据接收线程。
综上,人机交互应用程序至少需建立人机界面、实时控制数据接收两个线程。人机界面线程负责各界面的显示以及控制数据、参数、花型文件等数据的发送,并对接收线程中接收到的数据进行显示等处理。实时控制数据接收线程通过不停扫描实时控制层交互协议中的接收仲裁位判断是否有数据,当有数据时,对数据进行协议解析等处理并发送消息至人机界面线程进行显示。
4.2 实时控制层控制程序开发
鉴于无缝内衣机高实时性、高精度的控制要求,实时控制层程序不使用操作系统,采用基本的前后台系统:即后台程序为While(1)死循环函数,函数中顺序执行各个任务;前台程序为各类中断函数。图7为实时控制后台程序流程图,程序通过伺服电机编码器采集的数据计算出内衣机当前针位,将花型文件中当前针位的各个部件的动作转换为各驱动单元的控制数据,通过总线中断形式发送至各驱动单元,同时将编码器、当前针位、针筒转速等信息发送至人机交互层显示。
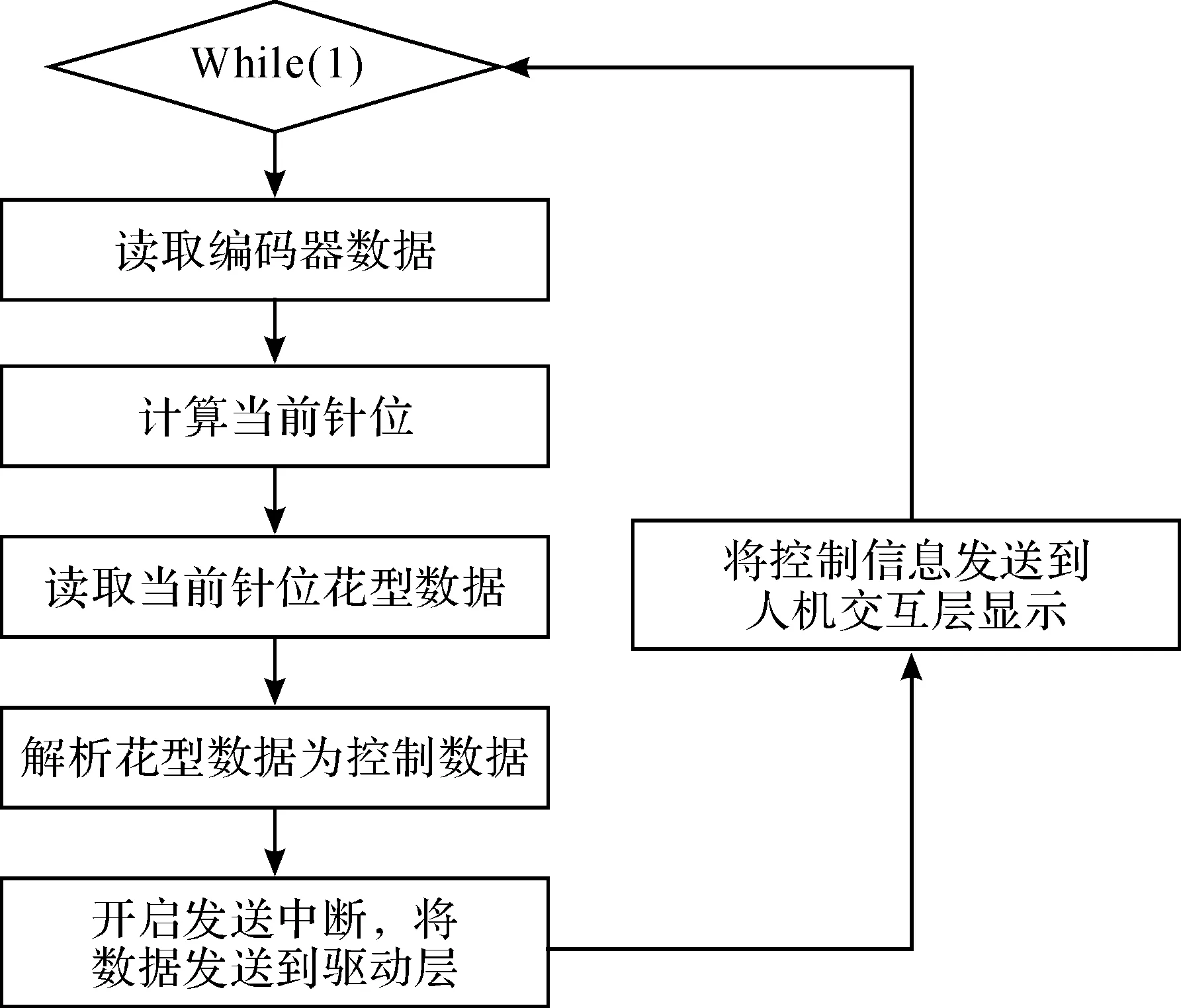
图7 主控后台程序流程
前台系统包括各类传感器中断、总线发送接收中断、定时器中断等中断函数。中断函数处理实时性较高的事件。如断纱传感器中断,当纱线断开时,断纱传感器发送信号到实时控制层,实时控制层接收到信息并中产生中断,立即停止无缝内衣机的运行并产生报警,同时将断纱信息发送至人机交互层显示。
5 结 语
本文通过对无缝内衣机机械结构、编织工艺的研究,提出无缝内衣机电脑控制系统的控制需求。根据此控制需求,设计了一种无缝内衣机控制系统。该控制系统采用人机交互层、实时控制层和驱动层的三层模块化设计。通过FPGA搭建形成RAM功能作为共享内存,形成双口RAM架构,实现人机交互层和实时控制层数据快速稳定交互。本文硬件设计采用模块化设计思想,使得系统可根据客户不同内衣机的机械控制需求,对各驱动单元进行定制,缩短了开发周期。同时,该设计方式也提高了系统的可扩展性、便于后期维护。经测试,本文设计的无缝内衣机控制系统可以满足无缝内衣机的生产需求,具有实时性强,效率高,稳定性好等优点。此外,该系统留有网络接口,可根据客户需求进行联网监控,实现机联网系统,符合行业发展需求。
[1] 孟振华,李津.无缝内衣的发展及应用[J].天津纺织科技,2006(3):50-53.
[2] 许兰杰,郭昕.电脑无缝针织工艺的发展与应用[J].现代纺织技术,2008,16(2):53-56.
[3] 方国平.内衣的科技创新:科学运用好新原料、新设备、新技术、新工艺[J].针织工艺,2008(3):67-68.
[4] 曹斌.无缝针织内衣机成圈机构原理与工艺的研究与分析[D].杭州:浙江理工大学,2011.
[5] 高华斌.国产无缝内衣机:销路已打开电控是软肋[N].中国纺织报,2010-10-20(8).
[6] 稚辉.三大纺机市场看好:经编设备、电脑横机与无缝内衣机[J].中国纤检,2010(12):68.
[7] 魏春霞,王琳.针织概论[M].北京:化学工业出版社,2014.
[8] 林乐,沈毅.基于FPGA的无缝内衣圆机控制系统设计[J].针织工业,2008(4):12-16.
(责任编辑:陈和榜)
Control System Design of Seamless Underwear Machine
XUShaoning1,2,RUXin3
(1.Zhejiang Information Institute of Machinery Industry, Hangzhou 310009; 2.Zhejiang Mechanical Engineering Society, Hangzhou 310009; 3.Faculty of Mechanical Engineering & Automation, Zhejiang Sci-Tech University, Hangzhou 310018)
As a typical circular weft knitting machine, seamless underwear machine was designed to produce seamless knitwear. Currently, high-grade seamless knitting equipment is mainly imported. Domestic research of seamless knitting technology started late. The computer control system remains improving in terms of function and reliability. Through the analysis of mechanical structure, knitting technology and control requirements of seamless underwear machine, this paper puts forward a design scheme for three-layer structure of seamless underwear machine, i.e. human-computer interaction layer, real-time control layer and driving layer. Besides, the design thought of hardware and software of control system is described. The real-time control layer achieves data transmission between the human-computer interaction layer and the real-time control layer through dual-port RAM circuit which is built by internal logic circuit of FPGA chip. The test and analysis of overall functions of control system verify the feasibility of this deisgn scheme. The test result indicates that the overall control system is reliable and real-time.
seamless underwear machine; control system; hardware design; software design
2016-06-14
许少宁(1957-),男,杭州人,本科,高极工程师,主要从事智能制造、数控技术及信息方面的研究。
TS183.92
B
1009-265X(2016)06-0051-05
猜你喜欢
今日农业(2022年15期)2022-09-20
流行色(2022年5期)2022-06-30
甘肃教育(2020年6期)2020-09-11
中国生殖健康(2019年11期)2019-01-07
中国生殖健康(2019年5期)2019-01-06
Coco薇(2017年6期)2017-06-24
空中之家(2017年3期)2017-04-10
中国新技术新产品(2017年1期)2017-01-20
科学与财富(2016年28期)2016-10-14
西北工业大学学报(2016年4期)2016-07-25
