
微气流角速度传感原理及几个关键问题
2016-12-15 01:04李丽伟
上海电力大学学报 2016年5期
李丽伟
(上海电力学院 能源与机械工程学院, 上海 200090)
微气流角速度传感原理及几个关键问题
李丽伟
(上海电力学院 能源与机械工程学院, 上海 200090)
研究了密闭腔内定向微流体的角速度敏感原理、驱动控制及气流效应检测.基于哥氏效应和热平衡方程建立了气体流速及热敏丝温度变化之间的关系模型,获得了输入角速度与传感检测输出电压信号间的传递关系;利用挤压膜阻尼探讨了微气流与其驱动机构的振动耦合,分析了密闭腔体结构以及热敏丝设置等对气流效应及检测的影响,结果表明,圆柱腔体及平行热敏丝可有效避免气流效应的交叉耦合.
微机电系统; 角速度传感; 微流体; 压电驱动
微机电系统(Micro-Electro-Mechanical Systems,MEMS)将微传感技术、驱动技术和微电子控制技术集于一体,其特征是尺寸极小,学科交叉广泛.[1-2]MEMS惯性敏感器件的核心之一是角速度传感器,主要用于回转体角速度的测量,输出与角速度成比例的电信号.随着MEMS技术的应用,角速度传感器等陀螺惯性器件已获微型化,而该微型化是以微机械陀螺为主的.[3-4]由于微机械陀螺采用活动质量块结构作为敏感元件,导致其抗振动、抗冲击性能低.相反,气流式惯性传感器以受迫流动气体作为敏感质量,具有高抗振性及抗冲击性,但仅限于宏观尺度上得以实现.目前,利用对流气体来敏感加速度的微机械热对流加速度传感器率先实现了气流式惯性器件的微型化,这为气流式角速度传感器的微型化奠定了基础.[5-6]本文结合已有宏观尺度的压电射流角速度传感器原理及微机械热对流加速度传感器,探讨了基于微气流的角速度传感原理及其实现的几个关键问题.
1 基于微气流的角速度传感原理
微气流角速度传感的基本原理是通过哥氏力使密闭循环气流偏离原来的轨迹来实现角参数的测量,如图1所示.循环气流经压电驱动产生速度为Vc的定向流动气流束,气流束流动信号由两根平行设置的热敏丝敏感.当输入角速度ω时,由于哥氏加速度的作用,气流束偏离中心位置,即原来从两根热敏丝对称中心通过的气流束会向某一方向偏离,造成两根热敏丝的温度发生变化,引起电阻改变,电桥失去平衡,输出与角速度ω相对应的电压信号.

图1 微气流角速度传感原理示意
作用于传感微气流的输入角速度ω与传感检测元件的输出电压信号之间通过以下3个环节联立,可导出输入与输出信号间的对应关系.
1.1 输入角速度与气体流速
气流束偏离的量值和方向取决于外加的角速度矢量.
如图1所示,若偏离量为Y,则哥氏加速度为:
(1)
由式(1)可得,因哥氏加速度的作用而产生的气流速度分量和偏离量分别为:
(2)
(3)
若热敏电阻与气流束槽道之间的距离为L,则有:
(4)
将式(4)分别代入式(2)和式(3),可得:
(5)
(6)
由式(5)可知,气流速度分量Vy正比于输入角速度ω,而气流速度分量Vx即为气流稳定流速Vc.气流流过热线时的速度为:
(7)
气流速度为:
(8)
式(8)描述了气流速度V随输入角速度ω的变化关系.
1.2 气体流速与热敏丝温度变化
在微气流角速度传感结构中,两根平行设置的热敏丝分别连接于惠斯登电桥的桥臂上,用于敏感气流速度变化信号,如图1所示.热敏丝的敏感机理基于能量交换原理,当被加热热敏丝处于流体之中时,随着流体速度的增加,热敏丝被带走的热量也随之增加,温度下降,这一物理过程中流速与热敏丝的温度之间存在一定的依赖关系,结合理论分析及经验系数可获得气体流速与热敏丝温度变化之间的关系为:
(9)
式中:A,B——由热线尺寸、流体特性和流动条件决定的参数,对于给定传感结构和特定流体,可认为A和B为常数;Thotw——热敏丝温度;
Tflow——流体温度.
1.3 热敏丝温度变化与输出电压
在一定的环境温度范围内,检测零位电压和温度的关系可近似为二次曲线关系,即:
(10)
式中:α1,α2——常数,且α2<<α1;T0——标准温度;U0——标准温度时的零位电压.
从输入角速度ω到热敏丝输出电压Uout之间的传递关系如图2所示.

图2 输入角速度与热敏丝输出电压的关系
因此,当流体的动力学粘度、密度和热传导特性一定时,若热敏电阻丝周围流体的速度不同,带走热敏电阻丝的热量也不同,从而引起热敏电阻丝两端的电压也产生相应变化.在静止状态下,敏感元件流过热敏电阻丝的气流速度相同,即UPt1=UPt2,这时气流对热敏电阻丝的影响相同,热敏电阻丝的温升也相同,电桥平衡,输出电压检测为零;当敏感元件有角速度输入时,此时UPt1UPt2,随着角速度的加大,引起两热敏电阻丝的温度变化之差就越大,电桥失去平衡,传感检测元件输出一个与角速度相对应的电压信号.
2 微气流的驱动与控制
微气流的驱动是实现角速度传感的关键元件,作为重要的执行机构,其主要功能是实现力或位移的输出.MEMS微驱动元件的种类很多,例如压电驱动、静电驱动、磁致伸缩驱动、电磁驱动、热驱动、形状记忆合金膜片驱动等,其中,压电驱动的位移控制精度高,可小于0.01m,响应速度快,约为10s,输出力大(各尺寸比),可达数千帕,功耗低,在使物体保持一定高度位置时,器件几乎无功耗,体积小,微小位移输出稳定,适合制作从纳米级到微米级的微驱动元器件,[3-4]因此已成为微气流角速度传感样件的首选驱动方式.
微气流的驱动及协调控制是传感原理实现的重要前提,该过程涉及复合驱动元件的电-固耦合,以及受到驱动的微气流与复合驱动之间的交互作用,即气-固-电多物理场耦合,密闭流体能否实现稳定定向流动进而构成强气流信号,关键在于微气流与压电驱动间耦合控制的精确性和有效性.
3 微气流的效应及检测
当传感器件基体受到哥氏力作用后,密闭腔体内的气体流动以强迫对流为主,腔体内气体流动所产生的对流换热主要包括气流与热线之间及气流与腔体壁之间的对流换热.因此,敏感腔体结构及热线的设置对微气流效应有极大的影响.
通常圆柱体或球体是比较理想的腔体结构,因为该类腔体内表面均为圆滑过渡,可避免气体在流动过程中产生湍流.而矩形等方腔体结构由于内表面存在直角连接面,气体流过交接过渡面时易形成“涡”,如图3所示.
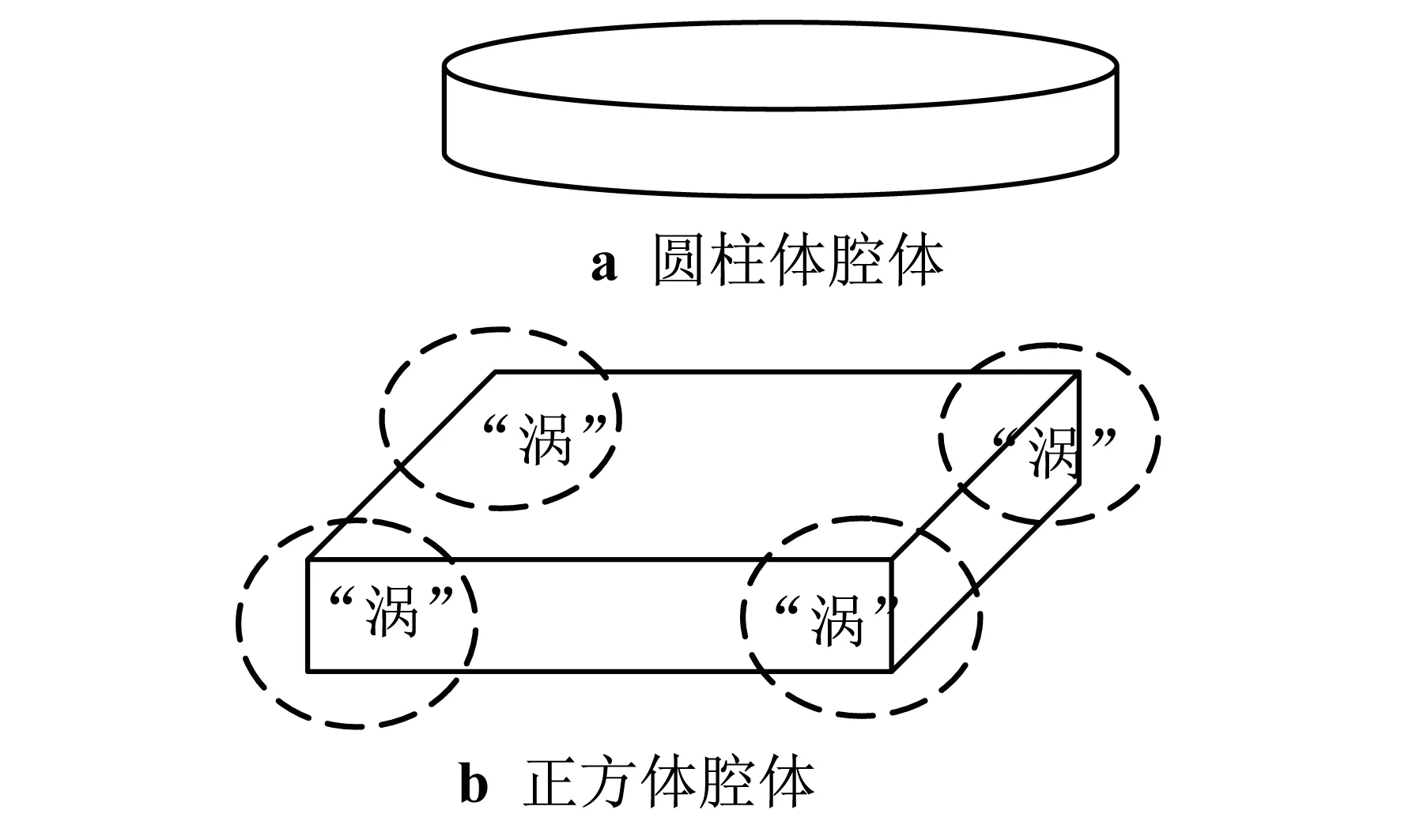
图3 不同腔体结构中的气体流动
同时,为减小腔体结构与气体之间的对流换热,敏感腔体的材料选择也很重要,尽可能选用如硅等导热性能好的材料.[7]
传感结构中,气体的流动范围涉及两个区域,即腔体区和检测区,如图4所示.
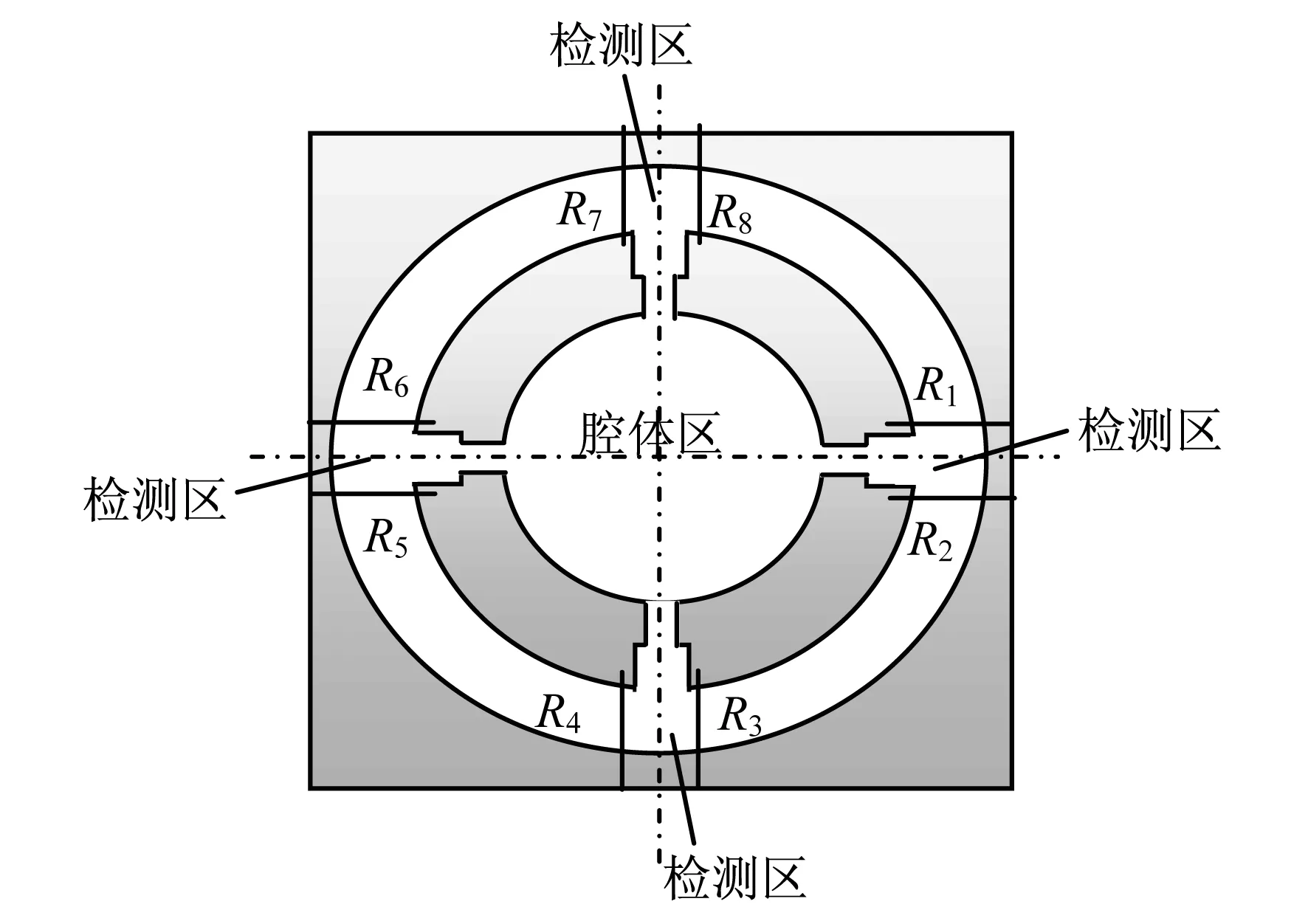
图4 气体流经的两大区域
气体受驱动后,从腔体区经通槽流入检测区的过程中,经历了复杂的多物理场耦合,主要包括气流与驱动机构的振动耦合、气流与腔体壁之间的对流换热,以及气流与热线之间的对流换热.从可行性方面考虑,通常重点研究腔体区气流与驱动机构的振动耦合,以及检测区气流与热线之间的对流换热,两个过程均具可控性和可测性.
在腔体区,如果不考虑气体之间以及气体和腔体壁之间的对流换热,则流动气体与驱动膜之间的耦合振动可视为等温过程.在等温条件下,气体与驱动膜的耦合振动可等效为两相对运动平行平板间的空气挤压膜阻尼效应,[8]腔基体固定,驱动膜相对基体沿z向运动,如图5所示.
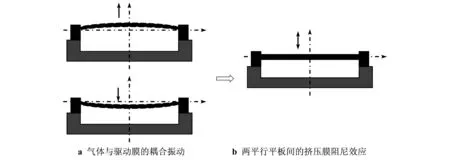
图5 气体与驱动机构耦合振动分析方案
在检测区,气流效应为气流与热线之间的对流换热.热敏元件(热线)是微气流角速度传感样件的核心检测元件,其结构直接决定样件的性能.常用的热敏丝结构有单丝结构、交叉结构和平行丝结构等.角速度的测量需解决角速度的大小及方向两个参数.若采用单丝结构,腔基体受到哥氏加速度作用后,虽然电桥有不平衡电压输出,但不能反映输入角速度的方向性.而采用交叉丝结构,输出灵敏度较高,但其交叉耦合影响较大,这对角速度的测量是不利的.本文采用平行丝结构,将两根热敏丝作为惠斯通电桥的两个臂,当输入不同转向的角速度时,电桥输出符号不同的电压信号.平行丝在腔体内放置的距离对测量范围、灵敏度、零位稳定性及数据的重复性都有影响.因此,设计时需要认真考虑两根平行丝在腔体内的位置.
另外,电源电压过高或过低时的输出信号、线性度和零位都不稳定,且供电电压较高易使传感样件的输出很快达到饱和状态.
4 结 论
(1) 受到驱动的MEMS微流体定向流动时,因哥氏效应产生偏转实现角参量测量,微气流的驱动及其流动效应的检测是影响传感精度的关键;
(2) 温度变化不大时,腔体区气流与驱动机构的耦合振动可采用等温挤压膜阻尼有效近似,也可通过修正阻尼项来考虑温度的影响;
(3) 腔体区气流与驱动机构和壁面间,以及检测区气流与热线间的交互作用会产生不利的交叉耦合,采用圆柱腔体和平行热线可避免过渡面湍流和交叉耦合.
[1] 冯焱颖,周兆英,叶雄英,等.微流体驱动与控制技术研究进展[J].力学进展,2002,32(1):1-16.
[2] YAO J J.RF MEMES from a device perspective[J].Journal of Micromechanics and Microengineering,2000(10):9-38.
[3] 许红平,葛成立,陈刚,等.微型驱动器及其测试技术[J].福建电脑,2002(5):6-7.
[4] LIU Tiegen,JIANG Shibin,NEUMANN Neils.Advanced sensor systems and applications VI[C]∥Proceedings of SPIE,2014:406-463.
[5] PAULl M.PZT thin films for microsensors and actuators;where do we stand? [J].Ultrasonics,Ferroelectrics,and Frequency Control,2000,47(4):903-915.
[6] HO P J,YOSHIDA K,YOKOTA S.Resonantly driven piezoelectric micro pump:fabrication of a micropump having high power density[J].Mechatronics,1999(9):687-702.
[7] WANG Yuhang,LEE Chiayen,CHIANG Cheming.A MEMES-based air flow sensor with a free-standing micro cantilever structure[J].Sensors,2007(7):2 389-2 401.
[8] BAO Minhang,YANG Heng.Squeeze film air damping in MEMS[J].Sensor and Actuators A:Physical,2007(1):3-27.
(编辑 胡小萍)
Sensing Principle of Micro Airflow Angular Rate and Several Related Key Techniques
LI Liwei
(SchoolofEnergyandMechanicalEngineering,ShanghaiUniversityofElectricPower,Shanghai200090,China)
To investigate the sensing principle of angular rate,actuating and measuring of directed micro airflow inside the sealed cavity,the transfer relation model between the signal of input angular rate and the output voltage is established according to the Coriolis effect and equation of heat balance.Several key techniques such as the actuating and controlling of micro airflow and the measuring of effect of micro fluid are discussed.And the influences of the structure of the sealed cavity and the setup of hot wires on the micro fluid and related measuring are analysed separately.The comparison shows that the cross coupling of micro airflow can be inhibited effectively by employing the cylindrical cavity and parallel wire.
MEMS; micro angular rate sensor; micro fluid; piezoelectric actuator
10.3969/j.issn.1006-4729.2016.05.005
2015-03-23
简介:李丽伟(1968-),女,博士后,副教授,山东定陶人.主要研究方向为微机械,微驱动.E-mail:liliwei@shiep.edu.cn.
TM38
A
1006-4729(2016)05-0433-04
猜你喜欢
装备制造技术(2020年3期)2020-12-25
装备制造技术(2020年1期)2020-12-25
物理与工程(2020年1期)2020-06-07
青年生活(2019年27期)2019-10-21
橡塑技术与装备(2018年5期)2018-03-17
中学生数理化·高一版(2017年3期)2017-07-08
火控雷达技术(2016年1期)2016-02-06
船电技术(2015年12期)2015-10-24
中国铁道科学(2015年4期)2015-06-21
中国舰船研究(2015年2期)2015-02-10
