
基于DeltaOS&QT的雷达终端的设计与实现
2016-12-13 05:15张鹏
舰船电子对抗 2016年3期
张 鹏
(中国船舶重工集团公司第723研究所,扬州 225001)
基于DeltaOS&QT的雷达终端的设计与实现
张 鹏
(中国船舶重工集团公司第723研究所,扬州 225001)
针对雷达终端要求的高实时性、高可靠性,提出了某雷达终端显示控制系统的软硬件设计方案。在设计方案中,显示控制系统基于PowerPC微处理器,采用嵌入式实时操作系统DeltaOS,并利用跨平台开发环境QT进行应用程序开发。测试表明该终端系统具有较高的实时性和可靠性,满足相关应用需求。
DeltaOS;QT;雷达终端;PowerPC
0 引 言
随着计算机技术的快速发展,嵌入式计算机在实际中的应用已十分广泛。雷达终端是典型的强实时性应用系统,需使用嵌入式操作系统进行支持。现阶段,广泛采用的是Vxworks操作系统,在Vxworks系统支持下系统可靠性、实时性均可满足用户的需求。但现在应信息安全的考虑及国家对具有自主知识产权操作系统的支持,国产操作系统陆续推出,其中DeltaOS(道系统)便是其中的代表。
本文选用了PowerPC集成处理器为硬件基础,结合DeltaOS嵌入式操作系统,采用可跨平台开发环境QT进行可视化应用程序开发,讨论了基于MPC8540集成处理器的雷达终端设计实现方案。
1 DeltaOS
DeltaOS作为我国依靠自主技术力量开发的嵌入式实时操作系统,具有较高的成熟度,可提供基于优先级抢占的实时任务调度策略和动态加载功能,已陆续应用于军工装备软件开发领域,并对硬件支持提供持续改进。DeltaOS主要包括:DeltaCORE(嵌入式内核,提供系统核心接口)、DeltaNET(基于TCP/IP协议族嵌入式网络模块),DeltaFILE(嵌入式文件模块)以及DeltaGUI(嵌入式图形模块)。在DeltaCore和其他支持系统模块之间,DeltaOS提供VxWorks接口兼容层,兼容多功能标准显控台标准配套模块所使用的全部VxWorks操作系统接口,支持VxWorks5.5目标代码的加载、运行,保障多功能标准显控台标准的沿用,保障基于多功能标准显控台所开发应用程序的快速移植[1]。DeltaOS系统架构如图1所示。
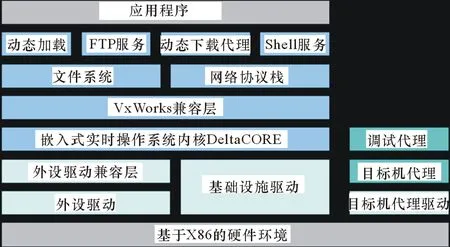
图1 DeltaOS组成
2 QT集成开发环境
QT提供了一整套基于C++应用程序开发的集成开发环境(IDE),包括类库以及用于跨平台开发的通用工具。QT的类库对应用程序开发所需要的所有基础结构进行了封装:包括了成熟的对象模型、内容丰富的集合类、图形用户界面编程与布局设计功能、数据库编程、网络、可扩展标记语言(XML)、国际化、OpenGL集成等,其中主要有QtGui、QtCort、QtNetWork及QtOpenGL4个模块,提供了较为广泛的开发能力,可对高性能、跨平台的人机界面进行开发[2]。
QT提供了跨平台开发工具QtCreator,它的主要功能优势:使用强大的C++编辑器可快速进行代码编写;集成Perforce版本控制工具管理源代码;为跨平台开发人员提供量身定制(如QTDesigner)。一般情况下,可使用QTCreator+MinGW在Windows环境下进行用户界面开发与调试,在开发完成后,用户可以使用QT提供的商用化跨平台开发工具(QT-commercial)进行特定平台移植,达到快速开发并且降低平台移植风险的目的。
3 雷达终端总体设计与实现
雷达终端是雷达系统中必不可少的组成部分,其主要工作是为操作员提供与雷达系统的交互,实现对雷达的控制、设备状态监视、探测目标观测等功能。雷达终端主要包括了显示模块、控制模块以及接口模块3个部分。雷达终端系统采用了嵌入式实时操作系统DeltaOS,开发调试在QTCreator中进行[3]。
3.1 硬件总体设计
雷达终端由一块PowerPC板组成,选用了MPC8540集成芯片,输入电压为1.5V和3.3V,集成了256kBL2cache,支持SIMD扩展,工作主频800MHz,同时还集成了通讯处理模块(CPM)。CPM分担了内核外围通讯工作。雷达终端的显示控制板主要具有如下功能(如图2所示):
(1) 具有上电、复位及掉电保护功能,并具有自检、输出自检信号功能;
(2) 1路CAN实现雷达整机加电、高压控制等功能;
(3) 1路USB总线实现触摸屏控制、摸球控制功能;
(4)CPM提供网络接口功能,RS422串口功能。
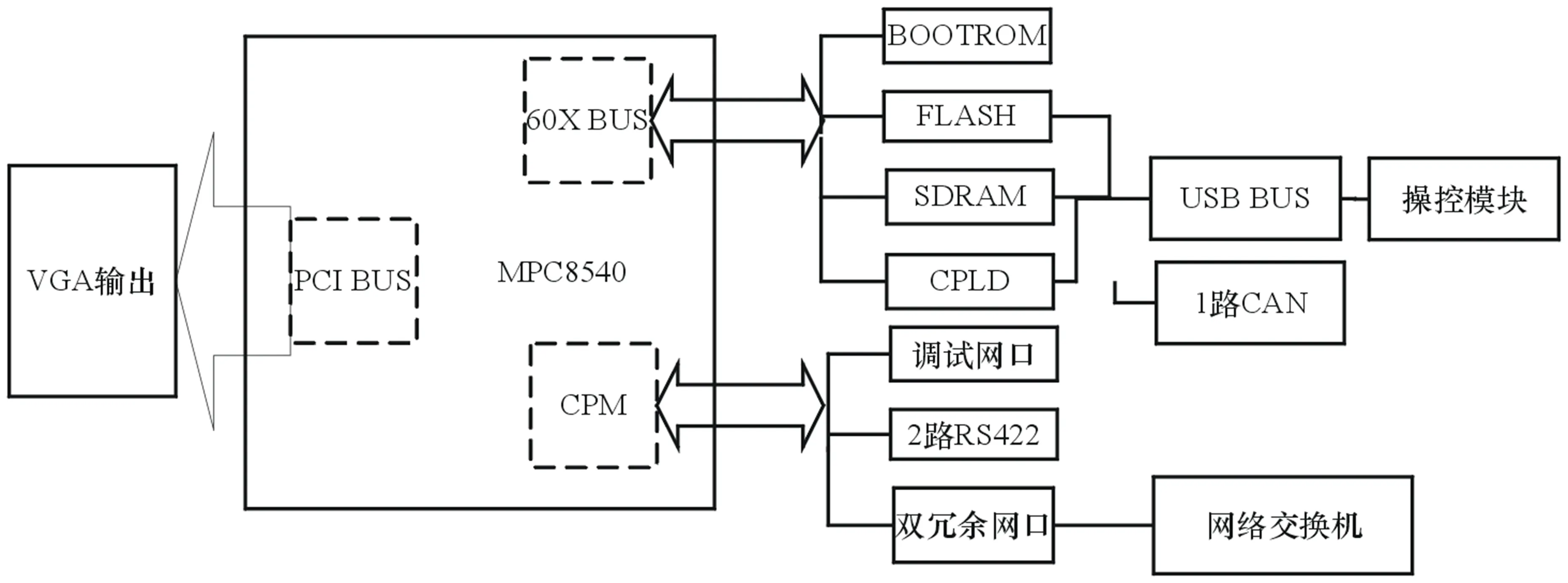
图2 显示控制板框图
3.2 DeltaOS功能性能分析
DeltaOS内核DeltaCORE提供了12类共130多个系统调用,为多任务应用程序开发提供了基础。本文主要就DeltaOS与Vxworks进行了比较,功能方面,针对于作战应用软件所用到的任务管理、内存管理、中断管理、信号量、消息队列、时间管理、看门狗定时器等功能,DeltaCORE与Wind(Vxworks内核)提供了相似的系统功能调用,能够满足具体应用要求。其功能比对如表1所示[4]。
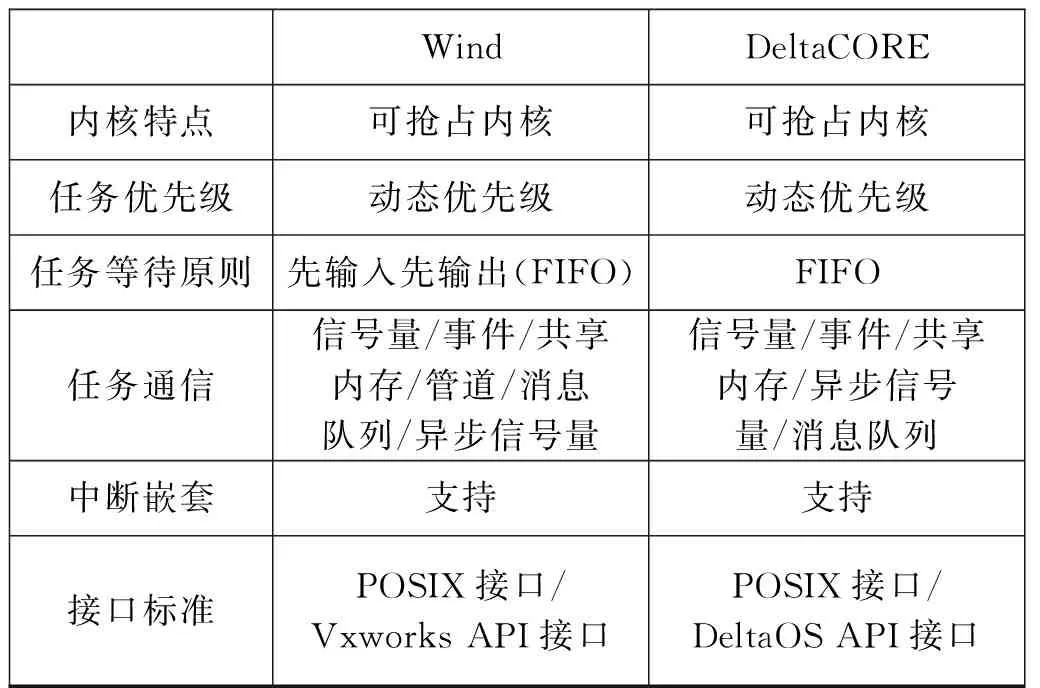
表1 内核功能对比
实时性操作系统一般需对其创建启用任务事件、中断响应时间、任务切换时间、任务通信时间等来评估系统性能[5],因此,通过在内核调用前后向I/O口写入信号,使用逻辑分析仪测量信号并计算时间差,测量结果如表2所示。
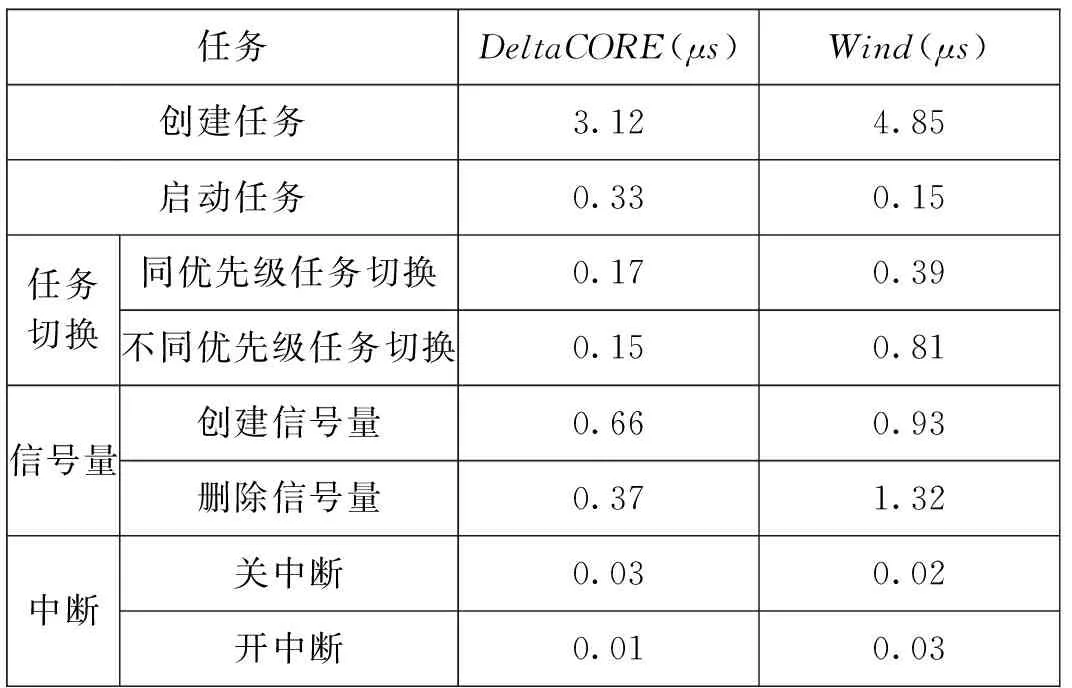
表2 内核性能对比
从表2中数据可看出,DeltaCORE和Wind内核性能相当,部分性能甚至略占优势,其各指标响应时间和Wind内核均属同一量级,因此,可满足作战应用软件的需求。
3.3 显示控制终端软件功能设计
本雷达显示控制终端主要包含综合显示、目标表页显示、显示控制、雷达参数设置、雷达参数显示、雷达系统操控6个软件模块。模块划分及功能流程设计如图3、图4所示。
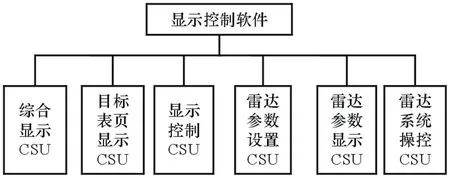
图3 终端软件组成
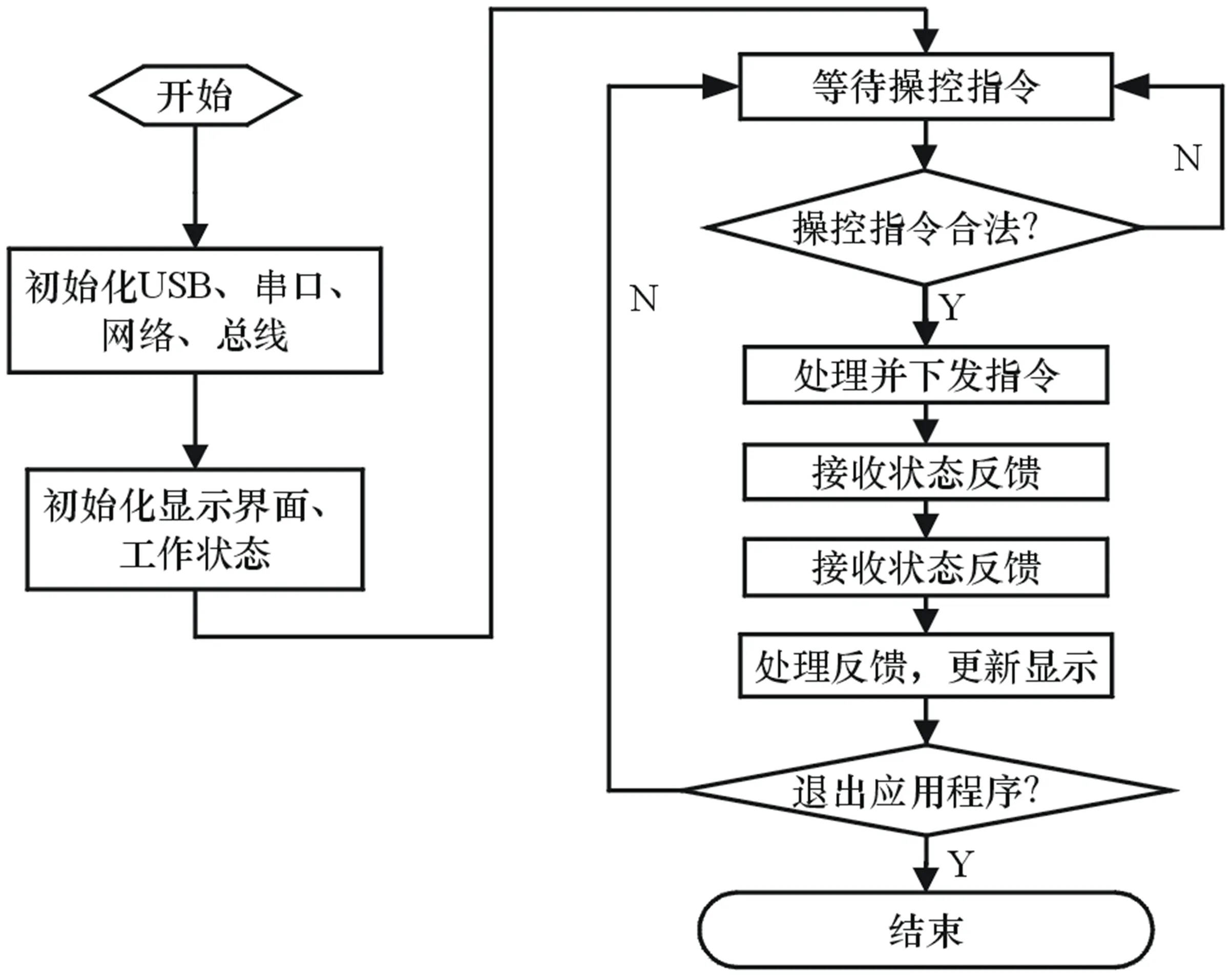
图4 终端软件功能流程图
综合显示功能主要完成PPI显示,包括背景视频、目标航迹、距标线、刻度、同步线、方标线等显示;以及导航信息、时间信息等提示信息的显示,提供操作员友好的人机界面,对雷达探测威力区内的情况进行观测。
目标表页显示功能主要完成对目标参数以表页形式进行显示,包括对目标批号、方位、距离、航向、航速等信息的显示,提供操作员目标航迹参数信息的实时更新显示,为操作者判断目标走势提供直观信息。
显示控制功能主要完成对PPI显示区控制,包括对显示量程、显示/隐匿、偏心显示、航迹轨迹显示、显示颜色等进行控制,提供操作者良好的交互方式,可依据操作者观察习惯进行定制。
雷达参数控制功能主要完成对雷达处理参数的设置,包括增益、多普勒频率、工作频点等设置,提供操作者快捷的人机交互。
雷达参数显示功能主要完成对设置后的雷达参数显示,与雷达控制功能相集成,对参数设置后的雷达工作参数进行显示,提示操作者进行正确的操作。
雷达系统操控功能主要通过中间件对操控模块进行控制,完成雷达工作模式、工作量程、伺服开关等控制,提供操作者可触摸控制接口,对触摸控制模块的操作进行响应,并将状态反馈于触摸控制模块。
4 系统集成与测试
雷达终端软件使用QTCreator进行开发,通过GCC+QT的编译环境,生成可执行目标代码后,将目标代码下载至目标机运行。运行后界面如图5所示。

图5 调试运行效果图
5 结束语
DeltaOS为应用程序提供了必要的内核功能接口及高可靠性、高实时性,满足了国产化课题的需要。QT提供了丰富的控件类库, 并提供了便捷的窗口布局工具, 为设计不同的雷达显示控制终端界面提供了高效、快捷的方法。因此,基于DeltaOS&QT下的雷达终端开发,不仅为开发者提供了便捷的开发方式,还为应用程序提供了高可靠性、实时性的运行环境。
[1] 张京.嵌入式软件开发[M].西安:西安电子科技大学出版社,2008.
[2] 郭兵,熊光泽,陈丽蓉,蔡建平.嵌入式应用软件环境DeltaOS/LamTool的设计与实现[C]//第十届全国抗恶劣环境计算机学术年会,2001:28-31.
[3] 朱秉颖.基于嵌入式GUI雷达控制系统人机界面设计[J].现代雷达,2007,29(3):52-55.
[4] 李阳,曹万华.基于DeltaGUI的双屏显示技术研究[J].舰船电子工程,2004,24(6):82-84.
[5] 刘云生,徐超.TOS实时性能测试[J].计算机工程与应用,2004(11):93-95.
DesignandRealizationofRadarTerminalBasedonDeltaOS&QT
ZHANGPeng
(The723InstituteofCSIC,Yangzhou225001,China)
Aimingatthehighreliabilityandstrongreal-timeresponsecapabilityofradarterminal,thispaperputsforwardthesoftwareandhardwaredesignschemefordisplayandcontrolsystemofacertainradarterminal.Inthescheme,thedisplayandcontrolsystemisbasedonPowerPCmicroprocessor,thereal-timeoperatingsystemDeltaOSisadopted,theapplicationisdevelopedbymeansofthecross-platformdevelopmentenvironmentQT.Thetestresultshowsthattheterminalsystemisprovidedwithhighreliabilityandstrongreal-timeresponsecapability,issatisfiedwiththeapplicationrequirement.
DeltaOS;QT;radarterminal;PowerPC
2016-02-22
TN
A
CN32-1413(2016)03-0090-03
10.16426/j.cnki.jcdzdk.2016.03.023
猜你喜欢
军民两用技术与产品(2022年5期)2022-06-28
电脑报(2021年11期)2021-07-01
江苏广播电视报·新教育(2021年49期)2021-04-21
电子制作(2019年19期)2019-11-23
数码世界(2017年12期)2017-12-28
电子制作(2017年1期)2017-05-17
北京航空航天大学学报(2017年12期)2017-04-23
电子技术与软件工程(2016年22期)2016-12-26
电脑知识与技术(2016年24期)2016-11-14
新媒体研究(2014年4期)2014-04-21
