
GNSS/INS组合导航接收机技术
2016-12-13 05:15刘国亮吴视野
舰船电子对抗 2016年3期
刘国亮,吴视野
(1.海军装备部驻重庆地区军事代表局,重庆 400042;2.中国电子科技集团公司第29研究所,成都 610036)
GNSS/INS组合导航接收机技术
刘国亮1,吴视野2
(1.海军装备部驻重庆地区军事代表局,重庆 400042;2.中国电子科技集团公司第29研究所,成都 610036)
全球导航卫星系统(GNSS)的一个非常重要的应用是与惯性导航系统(INS)进行组合导航。介绍了GNSS/INS组合导航接收机的工作原理,对接收机的关键技术进行了重点分析,并对其应用前景进行了展望。
全球导航卫星系统;惯性导航系统;组合导航;松组合;紧组合;深组合
0 引 言
全球导航卫星系统(GNSS)是一种天基无线电导航系统,它能够在全球范围内为多个用户提供全天候、实时、连续的高精度三维位置、速度及时间信息。GNSS具有较高精度、较低成本和长期稳定的优点,但多类导航卫星系统组合仍然不能完全避免卫星信号受遮挡而不能实施导航的风险。当载体通过遂道或城市楼群间时,这种信号盲区一般不能通过多类卫星组合加以克服。
惯性导航系统(INS)由于具有全天候、完全自主、不受外界干扰、可以提供全导航参数(位置、速度、姿态)等优点,是目前最主要的导航系统之一。但导航定位误差随时间积累是INS的一个致命缺点。
全球导航卫星系统与惯性导航系统相组合的导航系统,既能克服惯性导航随时间漂移的弊病,又能提高抗干扰能力,得到采用单一系统难以实现的明显的技术优势[1]:
(1) 发现并校正惯导系统的累计误差,提高导航精度;
(2) 在卫星导航信号无法覆盖的区域具有导航能力;
(3) 提高卫星导航载波相位的搜索速度,提高对信号周跳的检测能力,提升组合导航可靠性;
(4) 提高导航接收机对卫星信号的捕获能力,增强导航效率;
(5) 提高异常误差的监测能力,增强系统的容错功能;
(6) 提高导航系统的抗干扰能力,增强稳定性。
本文首先对GNSS/INS组合的3种模式进行介绍,然后对关键技术进行分析,最后对GNSS/INS组合导航接收机的应用前景进行了展望。
1 GNSS/INS组合导航原理
按照组合深度的不同,GNSS/INS组合可以分为以下3类:松组合、紧组合、深组合。
1.1 松组合导航接收机原理
松组合又称级联Kalman滤波方式。在松组合方式中,观测量为INS和GNSS输出的速度和位置信息的差值,系统方程为INS线性化的误差方程。通过扩展Kalman滤波(EKF)对INS的速度、位置、姿态以及传感器误差进行最优估计,并根据估计结果对INS进行输出或者反馈校正。
GNSS/INS松组合方式的原理如图1所示[2]。
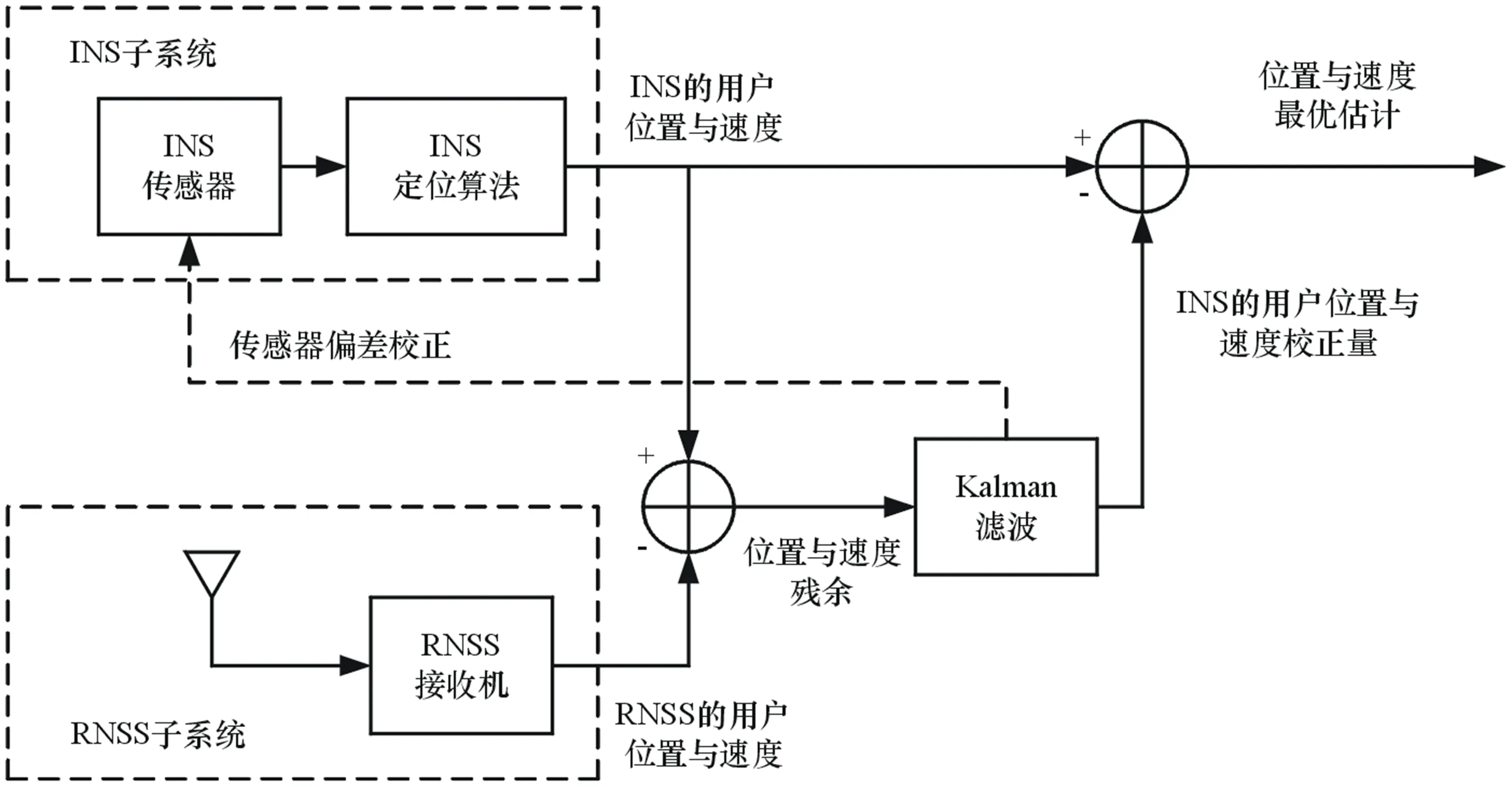
图1 GNSS/INS松组合原理框图
松组合方式将2个系统的定位结果差异反馈给INS子系统,以实时地对INS传感器进行偏差校正。虽然这种反馈回路不是松组合方式所必需的,但在惯性传感器质量较差时采用这种方式非常有效。由于INS子系统在组合中占据了主导地位,因此这种组合方式又称为受GNSS辅助的INS系统。
松组合方式的优点是:系统结构简单,易于实现,能大幅度提高系统的导航精度,并使INS具有动基座对准能力。
松组合方式的缺点是:(1)GNSS接收机通常通过自己的Kalman滤波输出其速度和位置,滤波器是串联关系,使组合导航观测的噪声是与时间相关的有色噪声,不满足EKF观测噪声为白噪声的要求,严重时可能使滤波器不稳定;(2)几乎无冗余信息,不利于异常诊断,不利于进行随机模型改进。
1.2 紧组合导航接收机原理
GNSS与INS在伪距、载波相位和多普勒频移等测距领域内进行的组合称为紧组合,它比松组合方式略复杂,但性能通常较好。紧组合方式的原理如图2所示[3]。
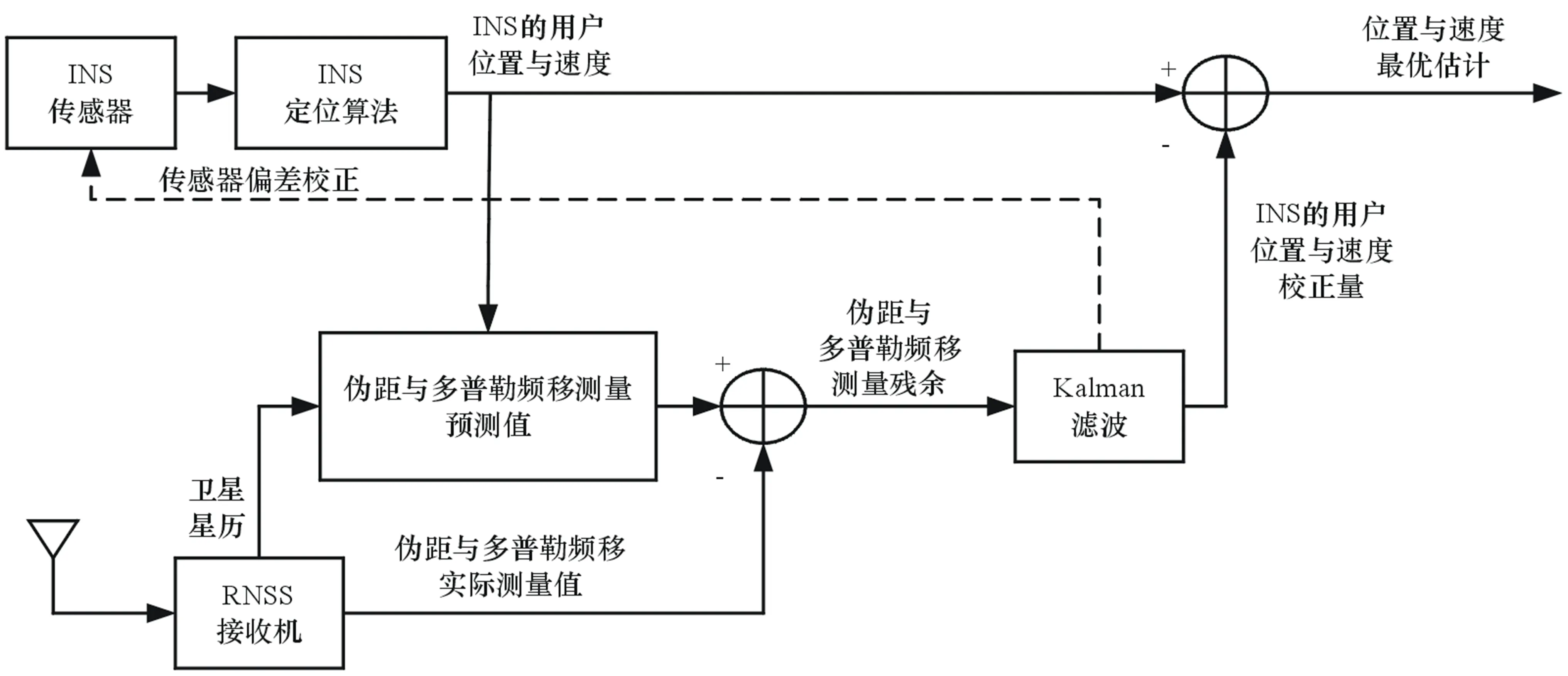
图2 GNSS/INS紧组合原理框图
紧组合方式中,INS子系统输出位置和速度结果,然后它们与GNSS的伪距、多普勒频移等测量值整合在一起。根据INS子系统的定位、定速结果以及GNSS卫星星历,紧组合系统可以更加准确地预测出GNSS信号的伪距与多普勒频移等,而这些测量预测值与GNSS实际测量值一起通过相减形成误差信号(即残余),接着测量残余再经过Kalman滤波后就得到对INS子系统定位、测速结果的校正量。同时,准确的GNSS测量预测值还可用来有效地检测GNSS实际测量值的正误,排除那些比如遭多径影响的错误伪距、由反射波信号引起的异常多普勒频移以及由失锁或失周带来的故障载波相位测量值等。另外,INS子系统的定位输出通常不与GNSS测量值相关。由于不存在滤波器的级联,并可对GNSS接收机的测距误差进行建模,因此这种伪距、伪距率组合方式比位置、速度组合具有更高的组合精度,而且在可见星的个数少于4颗时也可以使用。另外,紧组合方式中,不同时刻GNSS测量值之间的相关性较低,这是紧组合方式的另一个优点。
1.3 深组合导航接收机原理
深组合方式在紧组合的基础上,将惯性导航信息反馈给GNSS接收机的信号跟踪环路,从而帮助接收机更好地跟踪卫星信号的载波相位(或频率)和码相位。深组合方式的原理如图3所示。
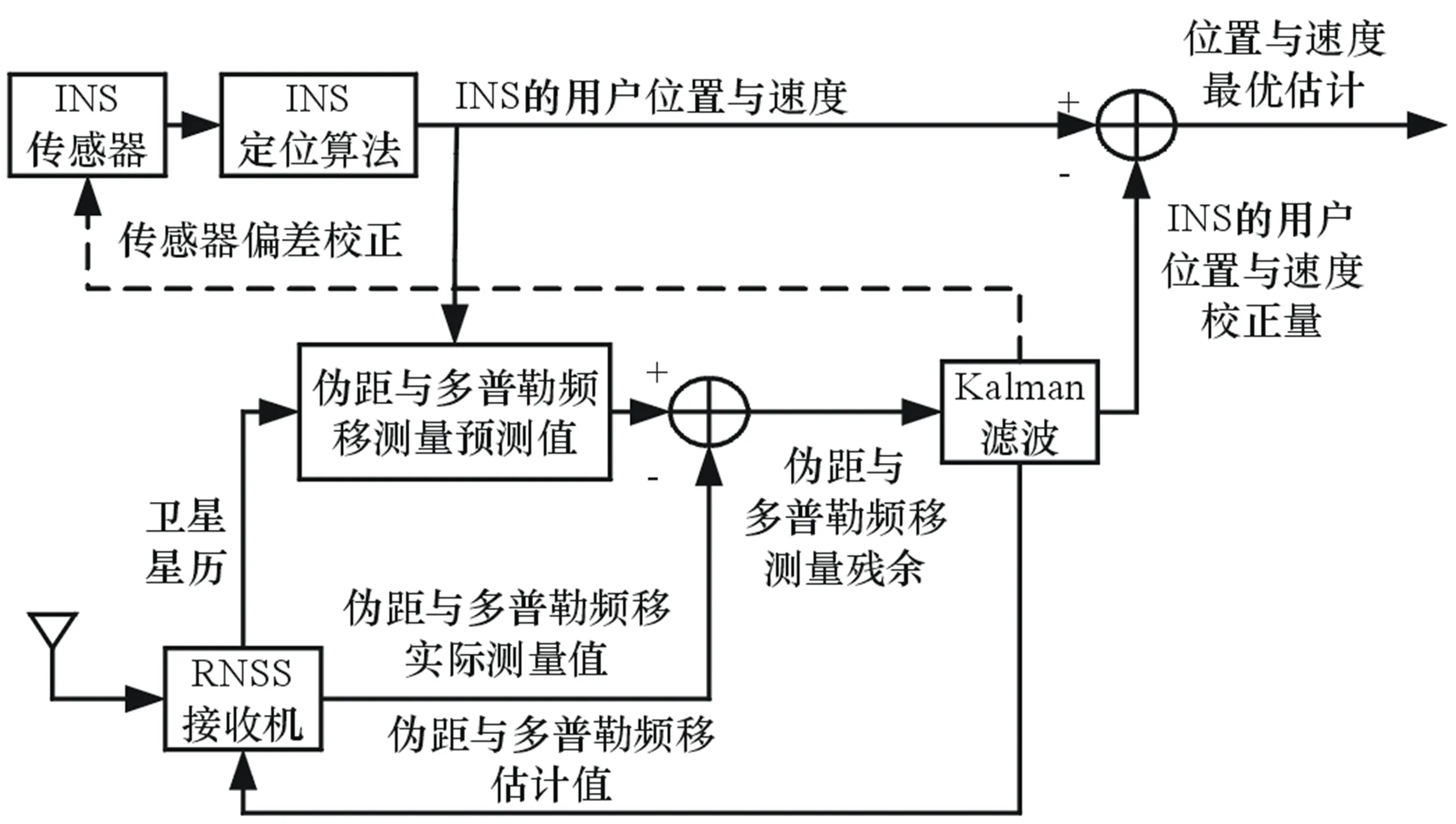
图3 GNSS/INS深组合原理框图
其主要思想是:使用滤波技术对INS的误差进行最优估计,同时使用校正后的INS速度信息对接收机的载波环、码环进行辅助跟踪,从而减小环路的等效带宽,增加GNSS接收机在高动态或强干扰环境下的跟踪能力。与深组合方式相比,松组合方式和紧组合方式中的接收机信号跟踪环路必须维持一个足够大的滤波带宽,以尽可能保证当用户突然改变运动状态时依然能够跟踪、锁定各个卫星信号。然而,一个较大的滤波带宽也就意味着较高的噪声量。相比之下,GNSS接收机对卫星信号失锁后,深组合方式能够更准确地定位和测速,并且能够帮助接收机更快地重锁信号。深组合方式将INS和GNSS进行一体化设计,通过共用电源、时钟等进一步减小体积、降低成本和减小非同步误差的影响[4]。
2 GNSS/INS组合导航关键技术分析[5-6]
2.1 组合导航系统建模及最优控制技术
GNSS/INS组合导航接收机是一个闭环控制系统。控制理论告诉我们,设计一个闭环控制系统首先需要考虑在参数允许变化范围内系统的稳定性。也就是说,通过调节合适的参数,能够使系统保持稳定。从抗干扰的角度,还需考虑系统对扰动的鲁棒性。另外,还需兼顾系统的稳态和瞬态性能。从最优控制的角度,需要保证在可容忍的时间内系统是收敛的。对高动态应用场合,还需保证系统对控制命令响应的实时性。在工程设计时,首先需要建立合适的数学模型并进行必要的仿真研究,对系统的各种重要性能进行软硬件设计前的评估。工程上,常采用MATLAB/Simulink仿真工具来实现。
2.2 组合导航接收机对抗干扰技术
GNSS以其全球性、全天候、准确定位、误差不随时间积累等优点在许多领域得到广泛应用。卫星导航定位可以通过伪码测量和载波相位测量实现。基于伪码测量的导航定位虽然应用广泛,但是精度较低,完善性较差;基于载波相位的定位精度很高,但是抗干扰能力、完善性和动态性能较差。
鉴于INS和GNSS性能的强烈互补,将惯导信息引入到卫星导航系统的载波相位环中建立GNSS/INS组合导航模式,即利用惯性导航系统输出的位置、速度、加速度信息辅助卫星导航系统的捕获环路和跟踪环路,获得高精度的载波相位测量值,并提高卫星导航系统动态性能、抗干扰能力、完善性与连续性;利用卫星导航系统输出的载波相位测量值辅助惯性导航系统,抑制惯性导航系统误差的发散,提高组合导航系统的精度、完善性、连续性、可用性以及抗干扰性能[7]。
GNSS利用校正后的惯性位置和速度信息辅助,进行卫星信号的捕获,并利用估计的伪距误差和伪距率误差分别辅助码跟踪环和载波跟踪环,可以有效地提高环路的等效带宽,从而提高卫星导航接收机的捕获、跟踪和抗干扰性能,减小系统的动态误差。在高动态和干扰环境中,可保证卫星导航接收机不间断地修正惯性元件测量误差和姿态矩阵,因此GNSS/INS组合模式的系统精度较高,可靠性高,抗干扰能力强。
从控制系统的观点分析GNSS/INS组合导航可以看出:独立工作的卫星导航信息是以较低频率运行的临界稳定的闭环系统,引入高速运行的惯性导航系统反馈信息,使得GNSS/INS组合导航系统成为一个闭环且稳定的控制系统,因此,INS的导航信息与GNSS信息的相互融合保证了组合系统的动态性能,缩短了系统的启动时间,增强了复杂环境下组合导航系统的抗干扰能力与完善性,提高了组合导航系统的精度与可靠性,从而为载体提供了精确可靠的导航定位信息和精密的授时信息[8]。
2.3 高动态环境下捕获、跟踪技术
高动态环境下的载波和码捕获是导航定位系统的一项关键技术,没有正确的载波和码捕获,导航系统不可能正常工作。导航接收机的捕获一般都有一个二维并行搜索过程,捕获的目的是识别所接收卫星的伪随机噪声码(PRN)(包括C码和P码),从而获得载波多普勒偏移和码相位的粗略估计值。
GNSS接收机跟踪的码环和载波环分别达到跟踪码和跟踪载波的目的。码环通常是延迟锁定环(DLL),载波环根据载波环鉴别器确定了跟踪环的类型,即锁相环(PLL)、科斯塔斯锁相环(CostasPLL)、锁频环(FLL)。为了满足载波跟踪环路的高动态运动要求,需要增大环路噪声带宽,而环路带宽的增加又使噪声变大,降低了接收机的抗干扰性能。图4采用INS速度辅助的GNSS接收机跟踪环路的方法,即将卫星速度和INS中载体速度求得的多普勒频率引入到跟踪环路中,能使环路噪声带宽大幅减小,提高接收机的抗干扰性能[9]。
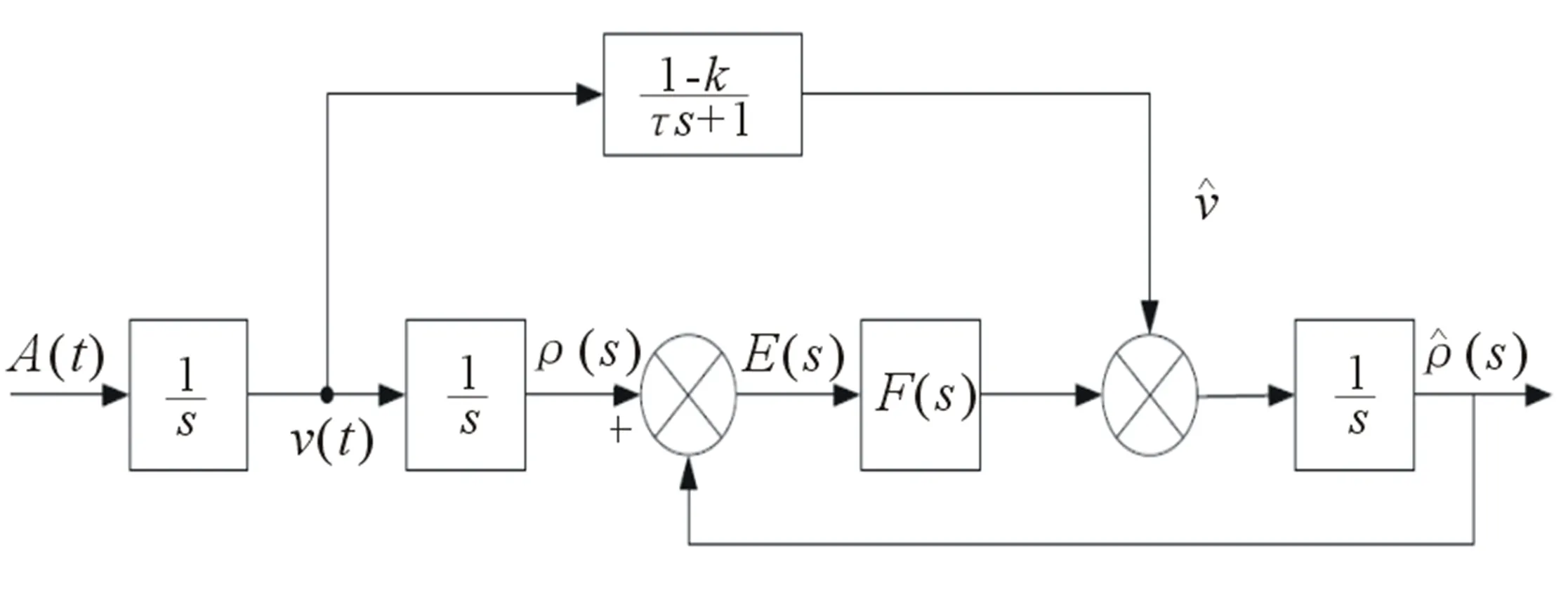
图4 INS速度辅助GNSS跟踪环路框图
(1)
(2)
当INS 速度信息为理想值时,即τ=1,k=0,则有H(s) =1,He(s) =0。这说明理想速度辅助下的GNSS接收机跟踪环路,能够跟踪载体的任何机动运动而不会产生误差。然而,在实际的跟踪环路中,VCO 存在着不稳定等因素,即使INS 速度辅助信息不含误差,仍然会导致跟踪误差。不过,在一定信噪比条件下,辅助速度越精确,则跟踪误差也越小[10]。
2.4 组合导航接收机信息融合技术
GNSS/INS组合导航是利用惯性敏感器测量信息和卫星信号进行融合来提高组合导航系统精度、可靠性与冗余度的技术。卫星定位以及INS解算过程都存在非线性环节,因此需要选择一个最优的在线非线性信息融合策略将惯性传感器和卫星信息进行有效融合。现实世界中,几乎所有的系统都具有非线性、非高斯的特性。对于这些非线性模型,如果利用线性Kalman滤波方法进行信息融合将会导致滤波器的不稳定,精度及可靠性均不能满足组合导航系统需要。采用线性化的扩展Kalman(EKF)方法进行信息融合虽然具有较高的计算效率,但是以精度上的损失及对模型的约束为代价,在一定程度上影响了系统的性能,特别是对于非线性较强的跟踪环路滤波器和组合导航滤波器如采用EKF会造成状态估计的失真。因此,需要以GNSS/INS组合为对象,开展多种非线性滤波器的应用研究,遵循从繁到简的原则,选择、设计和测试惯性信息和卫星信息的最优融合策略[11-12]。
3 GNSS/INS组合导航应用前景分析
美国在海湾战争、科索沃战争,特别伊拉克战争中,使用了各种精确制导武器攻击敌方地面目标。这些精确制导武器的一个共同点是采用GNSS/INS组合制导作为它们的中程制导,并在战争中取得了良好的攻击效果。
GNSS/INS组合导航能极大地提高导弹、飞船、火箭、飞机、舰船、车辆、单兵等的高精度定位和导航能力,具有重大的战略意义和广阔的军民应用前景。
3.1 精确导航、制导应用
GNSS/INS组合导航接收机为各类用户实时提供高精度位置信息和时间信息,实现全天候的精确导航和制导,在军事上可广泛应用于各类机动武器平台精确导航和精确制导武器的精确打击等,可有效提高导弹或炸弹的打击精度。
3.2 精确定位、测速应用
GNSS/INS组合导航接收机在军事上可广泛用于各种有人飞机、无人机、舰艇、装甲车辆等各种武器平台和系统的精确定位和测速,可有效提高作战部队快速反应能力和机动能力,赢得战争先机[13]。
3.3 嵌入、融合应用
GNSS/INS组合导航接收机能嵌入其它系统。如与通信系统结合可报告用户位置,使看得见的指挥成为可能,与侦察系统结合可用于紧急救援,对飞行员遇险救生和无人飞机、深海潜艇位置等意义很大,与侦察卫星结合可实现战场监视等[14]。
嵌入、融合将使组合导航接收机的应用领域极大扩展,发挥了卫星导航无所不在的能力,尤其是融合在天基网中,使数字化部队和数字化战争成为可能。
4 结束语
由于其巨大的优越性和潜力,GNSS/INS组合,尤其是深组合导航接收机技术将成为未来组合导航应用的必然发展方向。该技术受到包括中国在内的各国航空航天部门以及军方的大力支持,正在快速发展之中。
随着微机电系统(MEMS)技术的日益成熟,以及GNSS接收机逐步实现芯片化,通过深组合技术将MEMS-惯性测量单元(IMU)与GNSS进行组合,研制微型一体化的高性能深组合导航接收机,将在航空航天、国防甚至民用市场得到更加广泛的应用。
[1] 黄汛,高启孝,李安,等.INS/GPS超紧组合技术研究现状及展望[J].飞航导弹,2009(4):42-47.
[2] 陈偲,王可东.惯性导航与卫星导航紧组合技术发展现状[J].全球定位系统,2007(3):21-26.
[3] 李辉,王子滨.国外GPS/INS复合指导技术的发展[J].现代防御技术,2004,32(4):42-46.
[4] 李飞,段哲民,龚诚.GPS/INS组合导航系统优越性研究及仿真[J].电子测量技术,2008,31(3):7-10.
[5] 蒋庆仙,田育民,孙葵,等.北斗/INS组合导航关键技术分析[J].全球定位系统,2010(3):56-60.
[6] 杨洋.GPS/SINS深组合导航中的关键技术研究[D].南京:南京理工大学,2012.
[7] 李延辉.压制干扰下GPS接收机的捕获与跟踪性能分析[D].武汉:华中科技大学,2005.
[8] 唐康华,黄新生,胡小平.卫星/MIMU嵌入式导航接收机干扰性能分析[J].国防科技大学学报,2007,29(3):50-55.
[9] 孙黎明.INS辅助的GPS接收机研究[D].西安:西安电子科技大学,2008.
[10]刘苑伊,赵昀,耿生群.INS辅助GPS接收机跟踪环算法研究[C]//第一届中国卫星导航学术年会,2010:16- 20.
[11]谢钢.GPS原理与接收机设计[M].北京:电子工业出版社,2009.
[12]李涛.非线性滤波方法在导航系统中的应用研究[D].长沙:国防科技大学,2003.
[13]徐伯健,窦长江.GPS系统的军事应用研究[J].无线电工程,2004,34(9):61-62.
[14]王海霞.舰船组合导航信息综合集成技术应用研究[D].哈尔滨:哈尔滨工程大学,2009.
GNSS/INS Integrated Navigation Receiver Technology
LIU Guo-liang1,WU Shi-ye2
(1.Military Representative Bureau of Naval Equipment in Chongqing Region,Chongqing 400042,China;2.The 29th Research Institute of CSIC,Chengdu 610036,China)
One of the most important applications of global navigation satellite system (GNSS) is the integrated navigation with inertial navigation system (INS).This article introduces the operation principle of GNSS/INS integrated navigation receiver,analyzes the key technologies of receiver,and prospects the future of application.
global navigation satellite system;inertial navigation system;integrated navigation;loose integration;tight integration;deep integration
2015-11-02
TN965.5
A
CN32-1413(2016)03-0074-05
10.16426/j.cnki.jcdzdk.2016.03.019
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
城市道桥与防洪(2022年1期)2022-02-25
军民两用技术与产品(2021年7期)2021-10-13
河北工业大学学报(2021年4期)2021-09-23
科学与财富(2021年33期)2021-05-10
中学生数理化·八年级物理人教版(2020年11期)2020-12-14
科技与创新(2018年9期)2018-05-05
导航与控制(2017年6期)2017-12-20
中国新技术新产品(2016年21期)2016-12-08
百科探秘·航空航天(2016年9期)2016-12-01
