水电机组一次调频性能优化研究
2016-12-09 05:34高晓光李小军唐戢群
长江科学院院报 2016年10期
高晓光,李小军,唐戢群
(贵州电网有限责任公司电力科学研究院,贵阳 550002)
水电机组一次调频性能优化研究
高晓光,李小军,唐戢群
(贵州电网有限责任公司电力科学研究院,贵阳 550002)
为满足电网对水电机组一次调频的要求,对水电机组一次调频典型问题及影响因素进行了分析。提出了一种水电机组一次调频性能的优化方法,详细分析了水轮机调速器开度控制模式和功率控制模式下的PID参数优化方法,提出根据偏差变化自行调整PID参数大小,并改变一次调频计算死区,同时针对一次调频和AGC协调控制策略提出了合理建议。研究结果表明:以功率调节作为优先控制模式,可保证一次调频与AGC的有机统一;通过调速系统硬件改造及内部程序实现,可完成一次调频性能优化和改进。经600 MW水电机组实际工程验证,一次调频性能得到改善,对水电机组一次调频性能优化有一定的借鉴意义。
水电机组;调速系统;一次调频;功率模式;调节深度
水电机组由于具有宽广的调节范围及较好的调节速度,开、停机、负荷增减过程较快,控制灵活,多在电网中承担调峰、调频的任务。水电机组调速系统性能的优劣,特别是一次调频性能,直接影响电网的安全稳定运行。水电机组的调节特性比较复杂、个性突出,影响因素较多,诸如PID(proportional-integral-derivative)调节参数适应性、因有压过水系统的水击现象引起的功率反调、因水轮机特性曲线差异造成的开度-功率曲线非线性等问题。因此,水电机组一次调频特性优化应充分考虑水轮机引水系统的多样性、差异性、水力特性的复杂性、多变性及非最小相位特性[1]等。
1 水电机组一次调频概述
水电机组一次调频是指水轮机调节系统的被控制对象(水电机组)在联网运行(大电网运行)中,当系统频率变化超过调节系统的频率(转速)死区Ef时,水轮机调节系统将根据频率静态特性(调差特性)所固有的能力,按整定的调差率ep/永态转差系数bp自行改变导叶开度(或轮叶转角或喷针/折向器开度),从而引起机组有功功率的变化,进而影响电网频率的调节行为[2]。水电机组调速系统的调节器部分模型通常如图1所示,电液随动系统模型如图2所示。
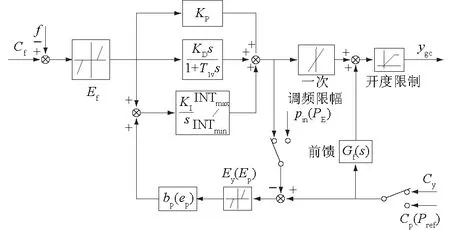
图1 水电机组调速系统PID调节器模型Fig.1 PID regulator model of hydraulic turbine governing system

图2 电液随动系统模型Fig.2 Electro-hydraulic servo system model
图1中,开度反馈及功率反馈仅对积分环节起作用;理论及实践表明,此模型具有较好的动态性能及较宽的稳定域。图1中:Cf表示频率给定;f为机组频率;Ey和Ep分别为人工开度死区和人工功率死区;Cy表示开度给定,在开度调节模式时起作用;Cp(Pref)为功率给定,只在功率调节模式时起作用,根据调节模式不同,Cy和Cp(Pref)可相互切换;pin(PE)表示机组输出功率;ygc为调节器对导叶随动系统的控制输出;KP,KI,KD分别比例增益、积分增益、微分增益;T1v为微分衰减时间常数;INTmax和INTmin分别为积分运算上限和积分运算下限;Gf(s)为开环增量环节,用以加快调节速度。图2中,T为随动系统纯延迟的时间;e-Ts为纯延时环节;Ty1为主配压阀反应时间常数;Ty为接力器响应时间常数;vmin和vmax分别为接力器最快关闭速度和接力器最快开启速度;ymax和ymin分别为接力器位移上限和接力器位移下限;yg为导叶接力器行程。
2 水电机组一次调频性能优化
水电机组一次调频优化要处理好以下几个基本问题:
(1) 响应滞后时间及调节速度。
(2) 调节深度,即调节量。
(3) 一次调频与AGC(Automation Generator Control)协调控制。
2.1 一次调频响应滞后时间及调节速度
响应滞后时间及调节速度可以通过优化PID参数实现。开度模式下的PID控制参数的设置,应选取较大的KP和KI值,KD值一般取0。其中,KP的设置以一次调频频率扰动过程中一次调频开度响应滞后时间在3.0 s以内,且不出现较大的水压变化和功率反调作为选取依据;KI的设置应保证在不出现超调的情况下尽量取大值,以减小一次调频的调节时间。因开度模式下设置KD对一次调频响应过程的影响非常小,且现行电力行业标准[3]及电网调度管理部门也规定,开度控制模式下不设微分增益,因此,KD值设置为0。
在功率模式条件下,为同时保证功率模式下的PID调节速动性和稳定性,既满足调速系统对调节上升时间、调节稳定时间的要求,同时又要满足稳定性的要求,避免出现小负荷低频振荡,功率模式PID参数可采用以下2种设置形式。
(1) 对于大中型水轮发电机组,大计算偏差时,即当机组功率目标值与功率实发值的差值ΔP=Pref-PE=Cp-pin超出±10 MW ,采用较小PID参数;小计算偏差下,即当机组功率目标值与功率实发值的差值ΔP=Pref-PE=Cp-pin在±10MW以内,采用较大PID参数。
对于小型水轮发电机组,ΔP可以取机组额定功率的5%~10%。
(2) 大小计算偏差均采用较小PID参数。对于条件(1)下的PID设置方式,为保证调节稳定性,采用较小PID参数可有效控制调节速率,在小偏差条件下,因为计算偏差过小,调节速度较慢,采用增加积分参数的办法,加快调节趋于稳定区间的速度。
对于条件(2)下的PID设置方式,可以有效保证调节过程的稳定性,但调节时间较前者偏长。
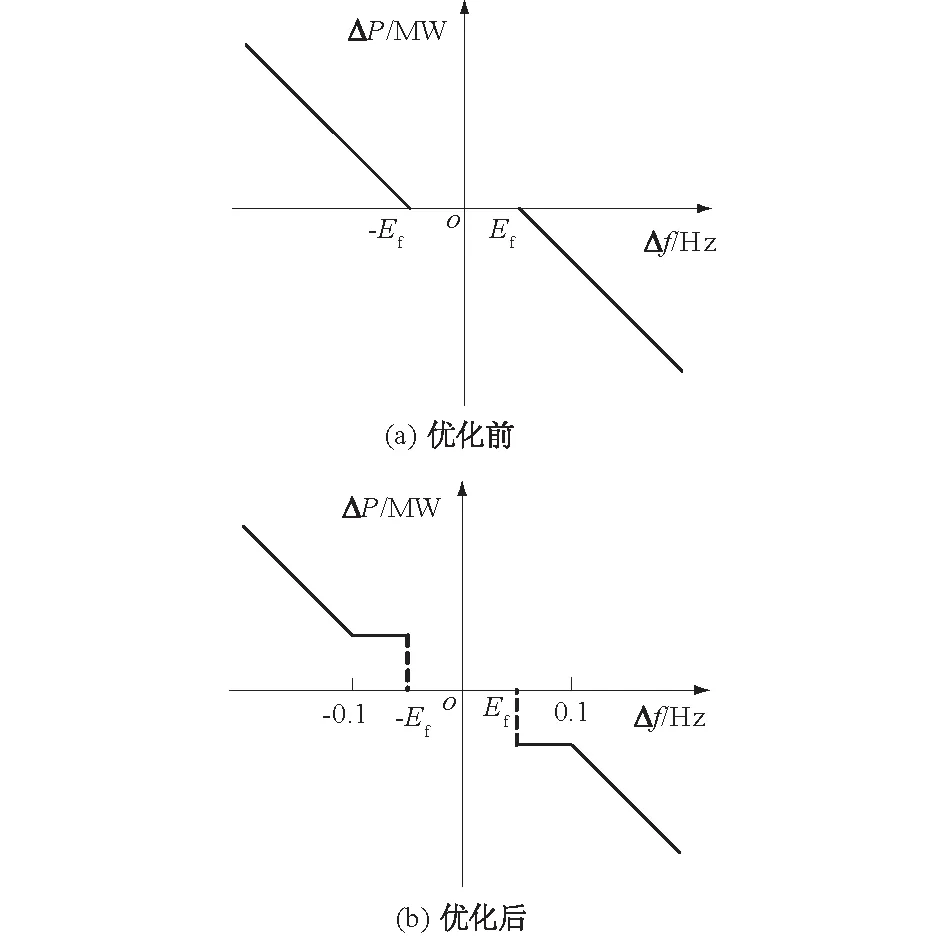
图3 优化前后的一次调频静态特性曲线(未考虑负荷限制幅度)Fig.3 Static performance curve of primary frequency regulation (PFR ) before and after optimization (without regard to power limit range)
2.2 一次调频调节深度
调节深度则受到计算死区和永态转差系数的影响。在实际工程中,一次调频调节深度往往存在2个方面的问题:
(1) 小频率偏差范围功率调节量不足。这是由于调节系统死区、传感器测量误差以及运行水头等因素叠加产生。
(2) 水轮机运行水头对一次调频调节深度的影响较大,特别是运行水头变化范围较大的机组,受综合特性影响,在高水位时导叶动作对出力影响较为敏感,但在低水位、高开度时甚至出现导叶增加,出力不变的情况。
针对问题(1),有2种处理方式:一是采用较小的永态转差率bp值,这样可以使得相同频差条件下,获得更大的导叶开度调节量,即功率调节量;这种补偿方式,在补偿小频差调节量的同时,使得大频差的调节量以比例方式放大,不利于机组稳定运行。二是采用整体补偿固定数值调节量,通过改变一次调频计算死区的方式实现,或者通过调整频差Δf与调节功率对应关系实现,发电机组输出功率和频率关系的曲线称为机组的功率-频率静态特性,可近似用直线来表示,如图3所示[4];这样的改进方式,仅反映在电网频率出现小波动的情况,在补偿调节量的同时,不影响机组及电网的稳定运行。
针对问题(2),可以采用调速器功率调节模式的实现来解决。水轮机运行水头对一次调频产生影响,主要是由于调速器本身运行在开度模式。在开度模式条件下,当一次调频动作时,调速器根据网频与额定频率产生的偏差计算导叶开度目标值,并执行动作。因此,开度模式一次调频的本质是频差→导叶开度→有功功率的调节方式。导叶开度→有功功率环节受到水轮机工作水头的影响,因此,在开度模式下,无法忽视水头对一次调频的影响。调速器功率模式采用频差→有功功率→导叶开度调节方式,可以有效地解决这个问题,但应注意运行参数的选择,避免出现大的超调,保证机组的安全稳定运行。
2.3 一次调频与AGC协调控制
一次调频与二次调频(即AGC)的协调控制则应以二次调频优先,但一次调频动作时,二次调频不应施加干扰[5]。因此,在监控系统及调速器程序实现时应注意处理好二者之间的协调关系。开度模式下的一次、二次调频协调关系处理由监控系统实现。功率模式下则由调速器自身实现,且往往表现为一次、二次调频相互叠加,两者有机统一。
3 工程验证
按照上述性能优化方法,进行某600 MW水电机组调速系统软硬件改造,并增设了功率调节模式,完成相关性能测试。由信号发生器模拟机组频率50.10,49.90,50.15,49.85 Hz,并在35%及65%2个开度下测试调速系统一次调频性能,表1为优化前后多次测量结果平均值的对照表。
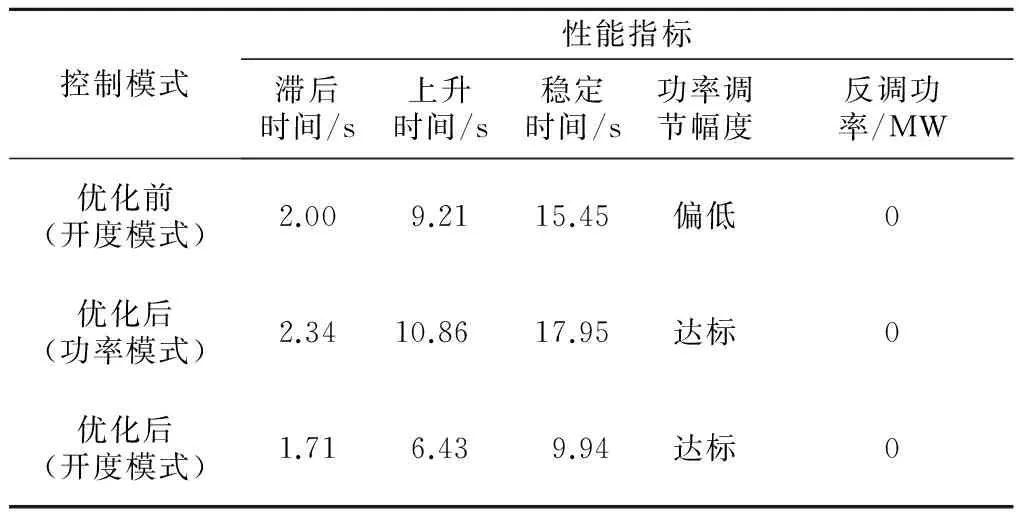
表1 某600 MW水电机组一次调频性能改进情况(平均值)
由表1可以看出,经优化后开度模式各项性能指标有大幅提升,例如,通过PID参数的优化,调节速度明显加快,通过对频率死区的计算补偿,使功率调节幅度达到目标值,但尽管如此,依旧无法忽略开度-功率非线性因素的影响。而在功率模式下,因为考虑到调速系统的稳定性,不能过分追求调节速率,因此在参数设置上使用较小的PID控制参数,牺牲了部分速动性能,但其调节量不受开度-功率非线性的影响。功率模式一次调频功能的实现对机组和电网的稳定运行具有很好的实际意义。
4 结 语
水头因素对水电机组运行特性的影响表现在多个方面,而对电网的直接影响即表现在一次调频调节性能。功率模式的实现以及功率模式下的一次调频可以很好地解决这一问题,但应充分考虑功率模式下PID参数的适应性问题。功率模式因其控制对象本身涵盖了水头因素,使其调节过程变得更加复杂,为保证功率模式下的稳定运行,牺牲部分速动性是有必要的。而在开度模式下,通过调节PID参数,优化计算死区等控制参数,可以达到提高一次调频性能的目的,但开度模式始终存在水头因素的局限性。因此,在具体实现时,可根据水电厂的具体情况来制定优化方案,充分发挥水电机组一次调频能力,这对抑制电网频率波动,实现安全稳定运行有着重要意义。
[1] 魏守平.水轮机调节系统一次调频及孤立电网运行特性分析及仿真[J].水电自动化与大坝监测,2009,33(6):27-33.[2] 张建明,李 越.水电机组一次调频若干问题探讨[C]∥中国水力发电工程学会信息化专委会2007年学术交流会论文汇编.北京:中国水力发电工程学会,2007:444-449.
[3] DL/T1245—2013,水轮机调节系统并网运行技术导则[S].北京:中国电力出版社,2013.
[4] 李阳坡,龙 云,王 坚.南方电网发电机组一次调频性能评价方法分析与改进[J].南方电网技术,2010,4(增1):28-31.
[5] 何常胜,董鸿魁 翟 鹏.水电机组一次调频与 AGC 典型控制策略的工程分析及优化[J].电力系统自动化,2015,(3):146-151.
(编辑:陈 敏)
Optimization of Primary Frequency Control Performanceof Hydropower Unit
GAO Xiao-guang, LI Xiao-jun, TANG Ji-qun
(Electric Power Research Institute of Guizhou Power Grid Co. Ltd., Guiyang 550002,China)
In order to meet power grid’s requirement of primary frequency regulation(PFR) of hydropower unit, we analyze the typical problems and influencing factors of PFR, and present a method of optimizing the PFR performance of hydropower unit. The method of optimizing PID parameters of hydraulic turbine governor is analyzed in detail. We propose to adjust the PID parameters according to the range of the deviation, and to change the dead band of the PFR calculation. Furthermore, we put forward some suggestions for PFR and AGC(Automation generator control) coordination control. Power regulation mode used as a priority control mode could guarantee the coordination between PFR and AGC. Through hardware modification and internal program of governor, the PFR performance is optimized and improved. The method is applied to a hydropower unit of 600MW for verification, and the result suggests that the PFR performance is improved.
hydropower unit; governing system; primary frequency control/regulation(PFR);power control mode;regulating amplitude
2015-08-31;俢回日期:2015-09-29
高晓光(1981-),男,黑龙江齐齐哈尔人,工程师,硕士,主要从事水电机组调节系统相关试验及科研工作,(电话)0851-85592798(电子信箱)gxgemail@163.com。
10.11988/ckyyb.20150726
2016,33(10):145-148
TK730.4
A
1001-5485(2016)10-0145-04
猜你喜欢
能源工程(2021年5期)2021-11-20
科学与财富(2021年33期)2021-05-10
北京汽车(2021年2期)2021-05-07
发电技术(2020年3期)2020-06-29
水电站机电技术(2019年5期)2019-05-31
能源(2017年7期)2018-01-19
能源(2018年7期)2018-01-15
中国工程咨询(2016年2期)2016-02-14
西部广播电视(2015年9期)2016-01-18
西部广播电视(2015年9期)2016-01-18