塔康系统的校飞方法研究
2016-12-08 06:40:00焦守波,李乐
中国科技信息 2016年20期
塔康系统的校飞方法研究

塔康主要功能是为飞机提供方位角和距离导航信息,实现为飞机指向和极坐标定位。塔康系统大型固定台一般在安装之后,还需要进行系统联试和校飞,然后才交付试用或使用, 这是因为即使是一个经过严格检验合格而又经过仔细选择场地和安装的设备,也很难做到完美无缺地考虑到周围环境对信标(主要是天线场型)产生的实际影响。从使用的角度,感兴趣的是实际使用效果,系统联试和校飞(特别是校飞)则是初步检查系统实际使用效果的有效方法。
系统联试
系统联试和校飞实际上是一项工作的两个步骤,前者是为后者服务的,一般联试是在地面上进行,通过联试来检查系统工作情况和初步达到的精度,以确定能否进行校飞。
系统联试主要指的是新建台校飞前的系统联试,进入联试的各设备均单独进行过校准,联试的目的是在地面检查信标与机载设备配合工作的技术状态,是否有不正常现象。其中主要是方位精度.其基本方法是在架好的信标台某一方位上,在信标天线零仰角附近(或大于零仰角),相距信标天线大于100米的距离设置机载设备和机载接收天线,然后用经纬仪直接测出该接收天线的方位角数值。不同方位角信号的给出方法是固定机载天线不动,而用人工方法相对旋转信标天线底盘,一般可按5°一点,顺序旋转一周(360°),对应记下信标给出的方位数据和机载设备实测的方位数据,每一个点,实读数据要不小于二次,然后经过处理,给出误差曲线,检查是否符合要求,距离功能在联试中检查一下是否正常即可,一般不进行不同距离点检查。
基准设备和数据同步录取
塔康系统校飞,目的是实测系统主要性能,以对其作出适当的评价。其中方位和距离精度是一个重要方面,因而在试飞中必须要有一个独立于系统之外,测量精度比塔康更高的设备,用该设备测量的数据作为“真值”,用来衡量塔康的误差,此设备一般称为基准设备。
比较传统的基准设备通常选择精度较高的炮瞄雷达较为合适,因它可同时给出方位和距离信息,可自动跟踪飞机,也可给出仰角参考数据。由于雷达站和信标台必须相距一定距离(最少几十米),所以在数据处理时,一定要考虑原点不一致的修正量问题。在条件比较差的地方,也可以利用简易光学仪表经纬仪作为基准设备,一般在天气好的条件下,经纬仪可以瞄准6—7公里以外的飞机,采用人工办法跟踪瞄准,以5°或l0°一点测出“真值”数据,用这种方法,经纬仪可设在信标天线架附近,不必作原点修正。
近几年,随着GPS的兴起,机载GPS逐渐被用于作为塔康系统校飞的基准设备。通过飞机上的机载GPS测出飞机相对于地面信标的方位及距离等信息,再与机载塔康设备指示器给出的地面信息进行比对,即可衡量塔康的误差。
前两种方法基准设备一般都是地面设备,其数据录取在地面进行。而塔康试飞数据,均在机载设备指示器中给出,而飞机在不断飞行中,数据是不断变化的.因而机载GPS作为基准设备更能准确而同步地录取基准设备和被测设备的相应数据。
塔康系统校飞
校飞前准备及注意事项
参与校飞的设备必须经过认真而全面地检查、校准。
参与校飞的设备必须经过认真而全面的地面联试检查合格。
测试要可靠、准确、迅速、同步。
要有可靠而方便的通信联络和数据传递手段。
事前要制定具体的校飞大纲.并及时进行数据处理和分析工作。

图1 顶空盲区测试飞行图
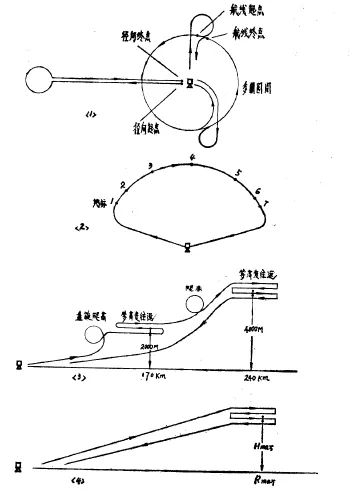
图2 试飞航线示意图
方位精度及顶空膏区校飞方法
方位性能校飞包含不同仰角,不同射频波道的飞行测试。例如,塔康系统有252个工作波道,又分为两种模式,按理说每一种模式起码要在(3~5)个波道上进行实测,而对于某一波道,在其工作区扇区内(仰角扇区)最少要测(3~5)个不同仰角(如0°、5°、l0°、20°.30°直至盲区边缘),每一仰角起码要转一周,测试36个点(或72个点),因此方位性能校飞是系统校飞中非常重要且工作量最大的工作。方位性能的主要校飞飞行是在近区低高度层,一般飞机距信标斜距为10公里左右,如果距离过近,飞机不易保持园周飞行,且读数间隔时间太短,不便录取;如果距离太远,一方面难以实现低高度高仰角,另一方面转圈时间太长,加大校飞工作量。
预空盲区测试,常用的有两种方法:其一是采用穿顶梅花瓣飞行,如图1所示,其目的是让飞机在一定高度上沿径向从不同方位进入穿出,以找出方位工作区和盲区临界线,这种方法的缺点就是在飞机由工作区(方位跟踪)进入盲区时,由于系统方位有记忆功能,易于造成判断模糊,而在由盲区进入工作区时,由于方位搜索时间也导致同样问题,这就不能单靠指示器判断,需要附加信号监视,比较麻烦;另外,飞行员在高空中保持正确的穿顶飞行很困难(特别是有侧风时)。其二是采用园周飞行,在预计的顶空盲区边缘附近,进行园周飞行(飞行员可借助保持高度,保持斜距飞行),利用飞测位精度相同的方法进行录取数据,从分析误差中找出盲区界限,这种方法相对比较简便。
远距方位、距离飞行方法
远距方位、距离试飞,重点检查远区性能,这要求选好航线,确定飞行高度,解决跨区航行管理等问题。检查方向不能有地物遮挡,如遮挡不可避免,要选择遮挡角必须小于0.5°;飞行高度足够高,使飞机天线和信标夫线在视线内;方位检查只在某一扇形
区进行(因一周航程太长);定标数据多用地标和大地照像等手段计算出来;在飞最大作
用距离时,要注意背台和向台参数及距离和方位功能是否有差异。图2是某设备试飞航线示意图,其中2 —(1)为测位测距精度试飞航线,园周为测位试飞,径向为测距试飞,这是在一个架次中兼顾两项内容的航线图;如图2 —(2)为中距离利用地标点检查方位精度航线;图2 —(3)为中空作用距离航线,在某一高度上往返飞行是为了测准在此高度上可靠作用距离。图2 —(4)为最大作用距离航线,实际飞行高度应大于Hmax,通常可据下式估算:
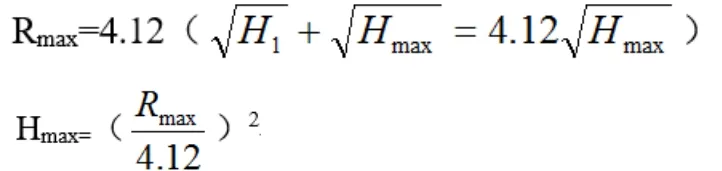
其中H1为信标天线高度,Hmax飞机飞行高度(单位为米),Rmax为可达到的最大视线斜距(单位为公里)。一般要试飞500公里,飞行高度约需20000米。
基准设备和被测设备原点变换修正量计算
塔康系统校飞时,被测设备误差是其实测数据与基准设备相应实测值之差,如果被测设备与基准设备不在同一地点,不能利用两实测值直接相减来计算系统的误差,必须先进行原点变换修正,然后再求误差。
一般情况,基准设备与被测设备之间天线的高度差较小,且对方位角影响也较小,因此不考虑高度差,如图3,“0”
点为被测信标,“0′ ”为基准设备,R2为“0”与“0′”之距,θ1为飞机P点的磁方位角,θ2为基准设备相对被测信标的磁方位角,θ3为P相对“0′ ”的磁方位角,R1为“0”和“P”之距离,D为“0′”和“P”之距离。
由于图3通过数学分析可建立下述数学模型:

其中△θ为被测设备相对基准设备的角度修正量,即:当基准设备实测到θ3为某一确定值时,则:

其中θ1为在被测信标点观察飞机的基准磁方位,而被测系统实测的飞机磁方位角θ1′,
只要能据式(2)计算出修正量△θ,则通过实测θ3便可求得θ1,从而由实测的θ1′可计算出系统误差。其实质是把基准设备和被测系统信标放在一个原点“0”来处理。
在实际试飞中,通常R1、R2、θ2都是可以据现场条件选定,可视为参变量,为了计算D和△θ,选取θ1为自变量进行计算.
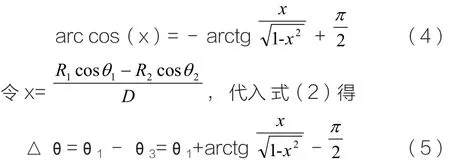
其中
在计算θ3时,θ3的取值范围和P点与0′点的坐标有关,可用下式予以表达:

另外,当飞机进入两参考点磁子午线之间区域(即ON,O′N′两线平行线之间地带),在θ1和θ3两角中,必有一个略大于零度,另一个略小于360°,所以其差值会产生突变,这是由于360°度周期所致。

图3 系统校飞时被测信标、基准设备和飞机的水平投影示意图
系统误差处理
塔康系统误差包括方位误差和距离误差。其中,方位误差包含周期性误差和随机误差两类,而距离误差一般不含周期性变化因素,它主要表现为随机性误差和时钟累计误差,而在现代技术条件下,时钟累计误差较小,因而在距离误差中,随机误差占主要地位。
结束语
本文介绍了塔康系统联试中的要点及校飞中需要检查的技术参数等,如方位精度,信标天线顶空方位盲区,测距精度,系统最大作用距离等。工作量比较大的重点项目是方位性能飞行。并详细讲述了塔康系统校飞中,设备原点变换修正量的分析与计算,给出了方位误差处理的基本方法及系统实测方位误差曲线,对评价系统主要性能具有指导意义。
10.3969/j.issn.1001- 8972.2016.20.020
猜你喜欢
幼儿园(2021年12期)2021-11-06 05:10:20
铁道通信信号(2018年3期)2018-04-19 02:32:56
公民与法治(2016年19期)2016-05-17 04:18:15
中国修辞(2016年0期)2016-03-20 05:54:32
幼儿100(2016年28期)2016-02-28 21:26:17
火控雷达技术(2016年2期)2016-02-06 02:29:00
长春理工大学学报(自然科学版)(2015年4期)2015-12-07 06:57:06
读者·校园版(2015年7期)2015-05-14 13:11:40
水道港口(2015年1期)2015-02-06 01:25:45
河南科技(2014年15期)2014-02-27 14:12:35