时间序列沉积物捕获器控制系统设计*
2016-12-03 05:12于海滨盛旭锋余小非
电子技术应用 2016年11期
于海滨,盛旭锋,余小非
(1.杭州电子科技大学 电子信息学院,浙江 杭州 310018;2.杭州电子科技大学 通信工程学院,浙江 杭州 310018)
时间序列沉积物捕获器控制系统设计*
于海滨1,2,盛旭锋1,余小非1
(1.杭州电子科技大学 电子信息学院,浙江 杭州 310018;2.杭州电子科技大学 通信工程学院,浙江 杭州 310018)
针对海洋沉积物在海洋多领域研究中的应用,设计了一种时间序列沉积物捕获器控制系统。该系统以MSP430处理器为核心,结合时钟芯片、步进电机及各种传感器,实现了捕获器在海底一年自动定时收集沉积物,并记录运行状况信息的要求。经测试,该设备工作稳定可靠,满足了设计要求。
沉积物捕获器;MSP430;低功耗;自动化控制
0 引言
海洋颗粒物质在其形成、变化和沉降过程中记录了许多生物活动以及物理、化学作用的信息,因此它对颗粒物质通量研究、海洋沉积学研究、全球变化研究及海洋环境检测研究都具有重要意义[1]。最早的沉积物捕获器只能采样单一时间内的沉降颗粒,若想获得具有时间分辨率的样品,需要多次投放,耗时耗力。而时间序列沉积物捕获器是一种沉放在水中一定深度,按照预先设置的工作程序自动定时收集水中沉降颗粒物质[2]的采样设备,其收集到的样品既有准确的时间,又有准确的数量,还有很高的时间分辨率,所以成为了海洋沉降颗粒收集的重要手段。由于该设备最长需要在水下工作一年,所以低功耗控制和设备冗余性设计是研究难点。
1 系统工作原理
捕获器控制系统结构如图1所示。上位机通过RS232串口与控制仓通信,设定工作周期、投放位置(经纬度)、投放时间、工作站位号。入水后设备自动工作,收集瓶保存漏斗收集到的海底沉降颗粒物质,经过预设的工作周期后,控制仓通过步进电机控制转盘转动一定角度,完成收集瓶的切换,磁性开关检测收集瓶位置是否旋转到位。假如旋转到位,控制仓控制温度、倾角传感器工作并保存接收到的检测信息,之后进入休眠模式。反之,控制仓控制步进电机继续转动。设备工作结束回收后,上位机再次和控制仓通信,导出存储的工作状态信息。通过收集瓶切换这个过程,使不同的收集瓶保存着不同时间段内收集到的海底沉降颗粒,这种具有时间分辨率的样品对海洋各领域的研究都有重大价值。

图1 捕获器控制系统结构示意图
系统设计要求如下:
(1)捕获器可以在水下采样数天到数周,最长工作时间为一年。
(2)设备运行稳定,收集瓶按照预设时间自动切换,工作状态信息记录完整。
2 系统硬件设计
系统的硬件设计如图2所示,主要包含主控模块、传感器模块、时钟模块、步进电机驱动模块和电源。

图2 控制系统硬件框图
由于本系统对功耗控制有严格要求,所以选择了美国德州仪器公司的 16 bit超低功耗单片机 MSP430F149作为主控模块处理器[3]。它的工作电压为 1.8 V~3.6 V,正常工作模式下电流为280 μA,还具有五级节电模式,RAM保持模式下的最低功耗只有0.1 μA。从待机模式下恢复工作,只需要不到6 μs时间。另外它还有丰富的片上外围模块,有精密硬件乘法器、一个 14路的 12 bit数模转换器、USART和SPI通信端口、2个16 bit定时器支持 PWM输出等功能[3],完全能满足本系统设计的资源及功耗要求。
沉积物捕获器在海流或波浪的影响下发生倾斜,在一定程度上将会导致高估或低估实际沉降通量。因此,需要根据仪器的倾斜参数进行校正[4]:

式中,F为校正后的沉降通量,FT为实际沉降通量,θ为倾斜角度,ΔT为采样间隔。
倾角传感器采用的是MPU6050模块,该模块内部集成了姿态解算器,配合动态卡尔曼滤波算法,能够在动态环境下准确输出模块的当前姿态,精度达0.01°。采用高精度陀螺加速度计 MPU6050,通过处理器读取MPU6050的测量输出,通过串口输出。因此,通过串口可以直接读取到所需的X、Y方向的倾角值。温度传感器选用 DS18B20,具有体积小、硬件开销小、抗干扰能力强、精度高的特点,仅需要一条口线即可实现与微处理器MSP430的双向通信。
位置检测由SMC磁性开关D-Y7PW完成,它是利用磁场信号来控制的一种开关元件。如图3所示,当样品瓶旋转到位(状态A),磁性开关和样品瓶的距离小于触发距离,磁性开关发送电信号给MSP430。若没有旋转到位(状态 B),两者距离大于触发距离,MSP430无法检测到磁性开关的电信号,一段时间后,MSP430控制电机继续旋转,直到检测到到位信息。

图3 位置检测示意图
时钟模块选用的是PHILIPS公司的PCF8563多功能时钟/日历芯片,具有宽电压和低功耗的特点。它采用I2C串行总线,最大传输速度为 400 kb/s,提供一个可编程时钟输出和一个中断输出。后者用来唤醒处于待机状态的MSP430。
电机驱动采用减速步进电机齿轮传动方式,驱动器型号SD366。SD366三相混合式步进驱动器采用伺服原理工作,输入电压18 V~60 V DC,最大驱动相电流 6.0 A,采用脉冲“+”方向以及双脉冲信号对步进电机进行控制,具有性能稳定可靠、发热量小等优点。
捕获器电由舱内锂锰电池组提供,单节电压为3.0 V。在水下工作过程中供电机驱动由7节电池串联后得到21 V电源提供。微处理器和各传感器所需3.3 V电源可由电池组经降压后提供。
3 系统软件设计
本系统软件设计包括主控程序、电机驱动程序和传感器数据采集3个部分。软件流程图如图4所示。

图4 控制系统流程图
3.1 主控程序
(1)系统初始化
包括关闭看门狗定时器,以及系统时钟、I/O口、ADC、中断、时钟芯片初始化和串口配置。
(2)设定工作模式
MSP430接收到串口中断后,提取上位机发送数据包中的内容,将当前时间通过 I2C总线写入 PCF8563内存地址 02H~08H时钟计数器中。将工作周期写入内存地址0FH的计数器和0EH的控制寄存器,8位计数器中存放的是定时器倒计数数值,控制寄存器用于设定定时器时钟源(4 096 Hz、64 Hz、1 Hz或1/60 Hz)。
(3)低功耗模式
在完成工作模式设定后,处理器需要进入低功耗模式,直到时钟芯片或串口发送中断唤醒。MSP430一共有LPM0~LPM4 5种低功耗模式。由于串口时钟需要用到ACLK时钟,所以选择仅 ACLK时钟处于工作状态的LPM3模式。
3.2 电机驱动
SD366驱动器的脉冲时序图如图5所示。T1取值要大于5 μs,表示方向信号要先与脉冲信号建立,滞后于脉冲信号消失;T2表示有效电平宽度,要大于 2 μs;T3表示无效电平宽度,要大于 2 μs;T4表示电机转动前,从释放状态进入锁轴状态所需要的时间,大于20 μs。根据这个时序图,MSP430通过I/O口先发送一个低电平使能信号,延迟T4时间后发送方向信号,再通过 PWM波的脉冲个数控制电机的转动角度,每1 200个脉冲转动1.8°。
3.3 传感器数据采集
温度传感器数据获取包括 DS18B20初始化、复位和温度转换。而倾角传感器数据可直接由串口2得到。MSP430将温度、倾角和位置检测的数据打包通过SPI总线存储到Flash中。
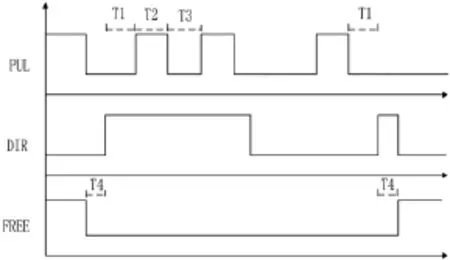
图5 脉冲时序图
4 系统调试
在实验室环境下进行一个星期的测试,供电电压为27 V,设置样品瓶个数为 7个。经过试验,每天中午 12点电机准时转动,转动角度为18°,采样数据记录完整。测得整个系统在睡眠模式下的电流为0.87 mA,电机转动时电流为429.5 mA左右。若工作一年,睡眠模式时间近似为一年,功耗为7.62 Ah,电机转动时间为 4 min,功耗为 0.03 Ah,总功耗为 7.65 Ah。电池组容量为 10.5 Ah,满足了该系统低功耗的要求。
本文通过软硬件低功耗设计和错误处理设计实现了捕获器控制系统低功耗及可靠性的要求[5]。该系统在设计时还保留了一些传感器接口,以便于系统的扩展升级。
[1]WAKEHAM S G.Sampling and experimental challenges for the next decade in marine organic chemistry——a prospec-tus[J].Marine Chemistry,1992,39(s1-3):239-242.
[2]朱光文.海洋环境观测取样技术[J].气象水文海洋仪器,1996(1):1-4.
[3]张毅,孙思萍,齐尔麦,等.海床基自动监测系统中央控制单元设计与实验[J].海洋技术学报,2007,26(4):1-3.
[4]BONNIN J,RAAPHORST W V,BRUMMER G J,et al. Intense mid-slope resuspension of particulate matter in the Faeroe–Shetland Channel:short-term deployment of nearbottom sediment traps[J].Deep Sea Research Part I Oceanographic Research Papers,2002,49(8):1485-1505.
[5]姜兴杰,杨峰辉.软件可靠性分析与设计[J].现代电子技术,2011,34(7):135-137.

图4 实验结果图
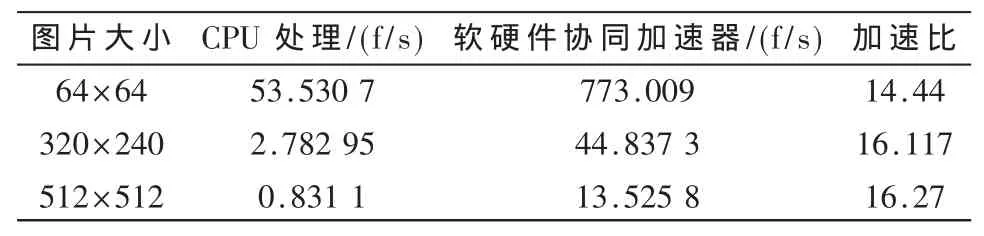
表1 CPU处理和加速器处理性能对比
4 结束语
本文实现了引导滤波的软硬件协同加速器,并利用开发环境 SDSoC所提供的优化指令对硬件进行了性能优化。与CUDA实现的引导滤波相比,性能虽有所不及,但加速效果明显,并在低功耗及开发周期上优势大于CUDA。本文提出的软硬件协同加速器可直接用于内置CPU和FPGA的嵌入式系统中,缩短了嵌入式工程师开发周期,提高了系统整体性能。
参考文献
[1]HE K M,SUN J,TANG X O.Guided image filtering[C]. Proceddings of the 11th European Conference on Computer Vision.Heraklion,Crete,Greece:Lecture Notes in computer Science,2010:1-14.
[2]郑贤辉.单幅图像去雨雪的算法研究[D].厦门:厦门大学,2014.
[3]杨燕,白海平,王帆.基于引导滤波的单幅图像自适应去雾算法[J].计算机工程,2016,42(1):265-271.
[4]漆琳智,张超,吴向阳.引导滤波的单幅图像前景精确提取[J].杭州电子科技大学学报,2013,33(5).
[5]王新磊,何凯,王晓文.引导滤波算法的 CUDA加速实现[J].吉林大学学报,2016,34(1).
[6]Xilinx.Zynq architecture[Z].2016.
[7]Xilinx.SDSoC development environment[Z].2016.
[8]Xilinx.SDSoC environment user guide[Z].2016.
[9]CHATI H D,MUHLBAUER F,BRAUN T,et al.Hardward/ software co-design of a key point detector on FPGA[C]. IEEE Computer Society,2007:355-356.
[10]Xilinx.Vivado design suite user guide:High-level synthesis[EB/OL].[2016-02].http:www.xilinx.com.
(收稿日期:2016-06-07)
作者简介:
刘声(1991-),通信作者,男,硕士研究生,主要研究方向:图像处理,E-mail:870244722@qq.com。
韩俊刚(1943-),男,教授,主要研究方向:软件和硬件的形式化验证、图形处理器和新型计算机系统结构。
韩帅(1991-),男,硕士研究生,主要研究方向:模式识别和人工智能。
The development of time series sediment trap control system
Yu Haibin1,2,Sheng Xufeng1,Yu Xiaofei1
(1.School of Electronic&Information,Hangzhou Dianzi University,Hangzhou 310018,China;2.School of Communication Engineering,Hangzhou Dianzi University,Hangzhou 310018,China)
According to the application of sediments in the research of deep sea,this paper designed a kind of time series sediment trap control system.This system used MSP430 microprocessor,combined with the clock chip,stepper motor and sensors,realized the equipment working under water for a year,and recorded the running status information simultaneously.The test result shows that the system runs steadily,and meets the design requirement.
sediment trap;MSP430;low power consumption;automation
TP273
A
10.16157/j.issn.0258-7998.2016.11.011
于海滨,盛旭锋,余小非.时间序列沉积物捕获器控制系统设计[J].电子技术应用,2016,42(11):46-48,55.
英文引用格式:Yu Haibin,Sheng Xufeng,Yu Xiaofei.The development of time series sediment trap control system[J].Application of Electronic Technique,2016,42(11):46-48,55.
2016-05-10)
于海滨(1979-),通信作者,男,博士,副教授,主要研究方向:图像处理与计算机视觉、嵌入式信号处理以及电子系统集成,E-mail:shoreyhb@hdu.edu.cn。
盛旭锋(1991-),男,硕士研究生,主要研究方向:海洋技术装备系统集成等。
中国大洋矿产资源研究开发协会资助项目(DY125-11-T-01);国家高技术研究发展计划(863计划)(2011AA090401)
猜你喜欢
海洋通报(2022年2期)2022-06-30
海洋石油(2021年3期)2021-11-05
成都信息工程大学学报(2021年1期)2021-07-22
河北环境工程学院学报(2021年1期)2021-03-19
装备制造技术(2020年11期)2021-01-26
电子制作(2019年24期)2019-02-23
电子制作(2017年13期)2017-12-15
电子制作(2017年13期)2017-12-15
通信电源技术(2016年4期)2016-04-04
通信电源技术(2016年5期)2016-03-22