
新研究
2016-12-01 06:30
传感器世界 2016年9期
大米Cd(II)无干扰检测新方法
合肥智能机械研究所黄行九和安徽光学精密机械研究所赵南京组成的研究小组通过将电化学方法与激光诱导击穿光谱(LIBS)联用实现了对大米中痕量污染物Cd(II)无干扰检测,此联用法为复杂样品重金属离子检测提供了新的思路。
据报道,中国市场10%的大米存在Cd(II)污染问题,传统的电化学检测方法可以用于Cd(II)的检测,然而却无法克服来自共存离子Cu(II)和Mn(II)的干扰,因此,研究小组的研究方向是建立新的检测平台以提高Cd(II)检测的准确性和选择性。
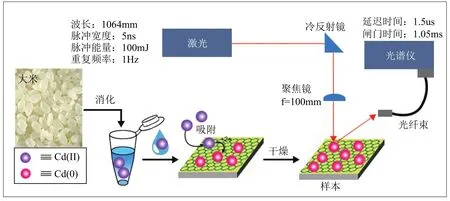
首先,利用电化学方法使大米消解液中Cd(II)以Cd(0)的形式富集在工作电极表面,然后利用LIBS对工作电极上的Cd(0)进行定量分析,最终得到大米中Cd(II)的含量。在该方法中,氧化石墨烯(GO)通过层层组装的方法修饰在工作电极表面以提高Cd(II)电富集的效率。在pH = 6.0的弱酸条件下,GO表面的羧基(COOH)去质子化形成COO-使得GO表面带负电荷。电化学富集过程中,对工作电极施加的负电压会在电极周围形成负电场,Cd(II)在电场的驱动下从溶液中转移到工作电极上,并通过静电吸引力吸附在GO表面,随后这些Cd(II)被还原成Cd(0)固定在工作电极表面。
大米消解液中主要有Ca(II),Cu(II), Mg(II), Mn(II), Na(I), Zn(II),Ni(II)和K(I),干扰实验结果证明,这些离子对Cd(II)的LIBS检测均无明显影响。此外,联用法将传统LIBS方法的检测下限降低了3个数量级,灵敏度提高了近3个数量级。
微纳机器人中的新成员——生物细菌机器人
沈阳自动化研究所微纳米研究小组融合纳米技术、生物技术与机电系统技术,提出了一种利用生物细菌作为机器人本体,通过群体控制完成微纳作业任务的新思路。
利用具有趋光性的可游动藻类细胞作为运动可控的单体微型机器人,基于布朗运动理论对群体机器人运动产生的集群效应作用力进行理论分析和建模,通过光路的设计和光斑诱导,实现群体机器人的控制,进而完成对微小物体的准确抓取、定向移动和定点释放。由于生物细菌具备从溶液中直接高效率将化学能转换为机械能的特点,因此一定程度上解决了微小机器人的能源供给问题。同时,由于操控是依靠微型机器人群体产生的类布朗运动实现,因此该操控方法降低了对被操作物体材料和形状的要求,提升了操作的适用性、灵活性和效率。
微纳机器人是机器人领域的前沿方向,在无创手术、药物输运、微纳制造等方面具有广泛应用前景,然而受机器人本体尺寸、材料性能等因素的影响,微纳机器人的能源供给、驱动控制、作业灵活性等问题依然是当前面临的关键挑战。针对这些问题,研究小组期望利用新的物理和生物原理,实现机器人感知、驱动和控制性能的提升。
猜你喜欢
中学生数理化(高中版.高考理化)(2021年4期)2021-07-19
中学生数理化(高中版.高考理化)(2020年10期)2020-10-27
科学大众(2020年10期)2020-07-24
商品与质量(2019年42期)2020-01-17
表面工程与再制造(2019年6期)2019-08-24
当代陕西(2019年6期)2019-04-17
资源节约与环保(2018年1期)2018-02-08
中国资源综合利用(2016年4期)2016-01-22
广州大学学报(自然科学版)(2015年4期)2015-12-23
中国火炬(2012年8期)2012-07-25
