宝马车总线特性及故障快速诊断技巧(一)
2016-12-01 13:07江苏省无锡汽车工程中等专业学校214153吴书龙
汽车维护与修理 2016年5期
江苏省无锡汽车工程中等专业学校(214153) 吴书龙
宝马车总线特性及故障快速诊断技巧(一)
江苏省无锡汽车工程中等专业学校(214153)吴书龙
1 总线系统概述
宝马车将总线系统分为主总线和子总线。主总线(表1)系统负责控制单元之间跨系统的数据交换,其中包括诊断、编程和设码等系统功能。子总线(表2)系统负责某个功能分组内的数据交换,主要采用BSD和 LIN总线。由表1和表2可以看出,不同总线系统的数据传输速率和传输方法不同,为确保不同总线系统之间各控制单元之间的通信,用网关作为总线系统之间的接口,使数据交换成为可能,中央网关模块(ZGM)负责将信息从一个总线系统传递至另一个总线系统。随着驾驶人辅助系统和舒适娱乐系统的普及,车上电子装置和控制单元越来越多,为便于数据的交换和管理,宝马车总线系统经历了多次演变(图1)。最新的控制单元集中方案将ZGM集成在BDC内,通过星形连接器连接方式使所有主总线系统相互连接,将不同协议和数据传递速率的信息转换到其他总线系统上,使各总线系统提供的信息可以综合利用。另外,ZGM通过以太网可将编程数据传输到车辆上。

表1 宝马车主总线
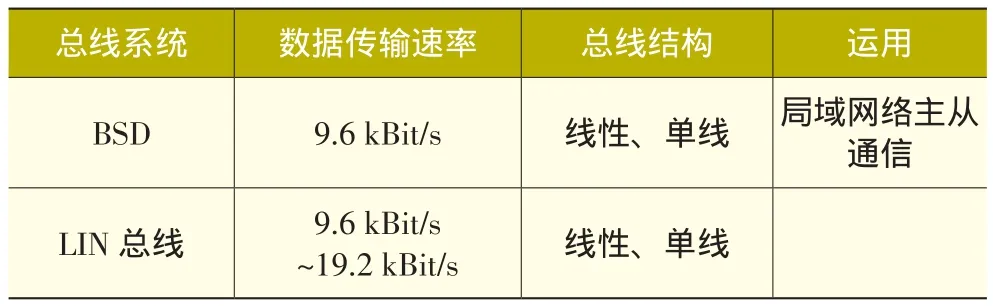
表2 宝马车子总线
2 常见总线特性及故障快速诊断技巧
下面从K-CAN、LIN、PT-CAN、FlexRay四种常见总线的特性进行分析,归纳出总线故障快速诊断的技巧。
2.1 K-CAN(车身-CAN)总线特性分析及故障快速诊断技巧

图1 宝马车总线系统的演变
K-CAN 电路如图2所示,K-CAN数据传输率为100 kBit/s,采用双绞线结构,通过中央网关模块(ZGM)与其他总线系统相连,一般分成2条并联电路。K-CAN通过总线来唤醒,无需附加唤醒导线;K-CAN使用的是逻辑电阻,没有终端电阻。K-CAN正常时,K-CAN-H的电压为0.2 V,K-CAN-L的电压为4.8 V,其正常波形如图3所示,K-CAN-H在0 V~4 V变化,K-CAN-L在5V~1 V变化。

图2 K-CAN电路
当K-CAN-H和K-CAN-L互短、并联电路总支上任意一根总线对搭铁或对电源短路时,K-CAN可单线运行,车辆快测后,控制单元树中没有不通信的控制单元(一般不通信的控制单元显示黄色,如图4所示),但都会出现与该并联电路相关的很多故障代码(图5),此时可以通过测量波形进行故障区分:如果K-CAN-H和K-CAN-L的波形重合(图6),则说明2根线互短;当其中一个波形正常变化,另一个波形为电源电压或0 V时,说明该总线对电源或对搭铁短路(图7和图8)。
当K-CAN并联电路总支上2根总线同时磨断或网关内相关部分损坏时,K-CAN总线无法运行,车辆快测后控制单元树中所有相关控制单元不通信(一般模块不通信的控制单元显示黄色,如图9和图10所示),并且会出现与K-CAN 不通信相关的故障代码(图11)。

图3 K-CAN的正常波形(截屏)

图4 K-CAN并联电路总支上单一总线故障在车辆快测后控制单元树状态(截屏)

图5 K-CAN并联电路总支上单一总线故障列表(截屏)

图6 K-CAN-H和K-CAN-L互短的波形(截屏)
当K-CAN并联电路分支上某一控制单元任意一根总线对搭铁或对电源短路时,K-CAN可单线运行,车辆快测后控制单元树中没有不通信的控制单元(一般不通信的控制模块显示黄色,如图4所示),但会出现与该控制单元相关的故障代码(如图12)。同样,可以通过测量波形进行故障区分:当其中一个波形正常变化,另一个波形为电源电压或0 V时,说明该总线对电源或对搭铁短路(如图7和图8)。

图7 K-CAN-H对电源短路的波形(截屏)
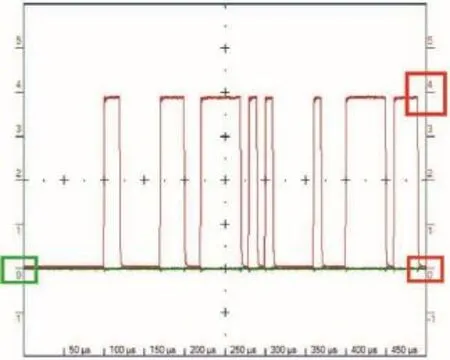
图8 K-CAN-L对搭铁短路的波形(截屏)
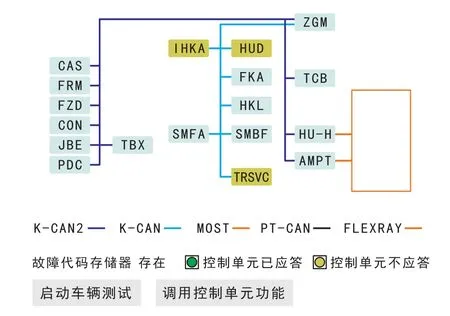
图9 K-CAN上某一并联电路不通信在车辆快测后控制单元树状态(截屏)
当K-CAN上某一控制单元自身2根总线同时磨断或控制单元内相关部分损坏时,与该控制单元相关的K-CAN总线无法运行,车辆快测后控制单元树中该控制单元不通信(一般不通信的控制单元显示为黄色,如图13所示),并且会出现与该控制单元K-CAN 不通信相关的故障代码(如图14)。
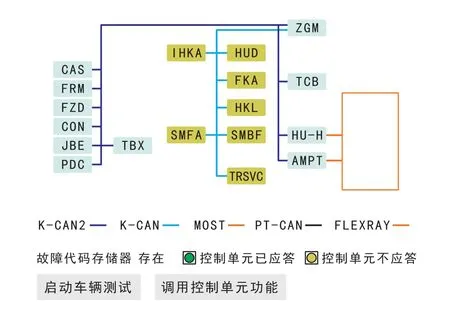
图10 K-CAN上网关不通信在车辆快测后控制单元树状态(截屏)

图11 K-CAN并联电路总支上不通信故障列表(截屏)

图12 K-CAN并联电路分支上某一总线故障列表(截屏)
2.2 LIN总线特性分析及故障快速诊断技巧
LIN是一个单线系统形式的子总线,实现主控单元和副控制单元之间快速、安全的通信,例如脚部空间控制单元至驾驶人侧车门开关组和外后视镜的连接(图15)。其供电电压和信号传输电压与蓄电池电压相同。在 LIN 总线系统中,始终仅安装一个主控制单元,最多可以连接 16个用户(即所谓的副控制单元)。没有规定的总线结构,数据传输速率为9.6 kBit/s~19.2 kBit/s,由于数据传输速率小,无需终端电阻。
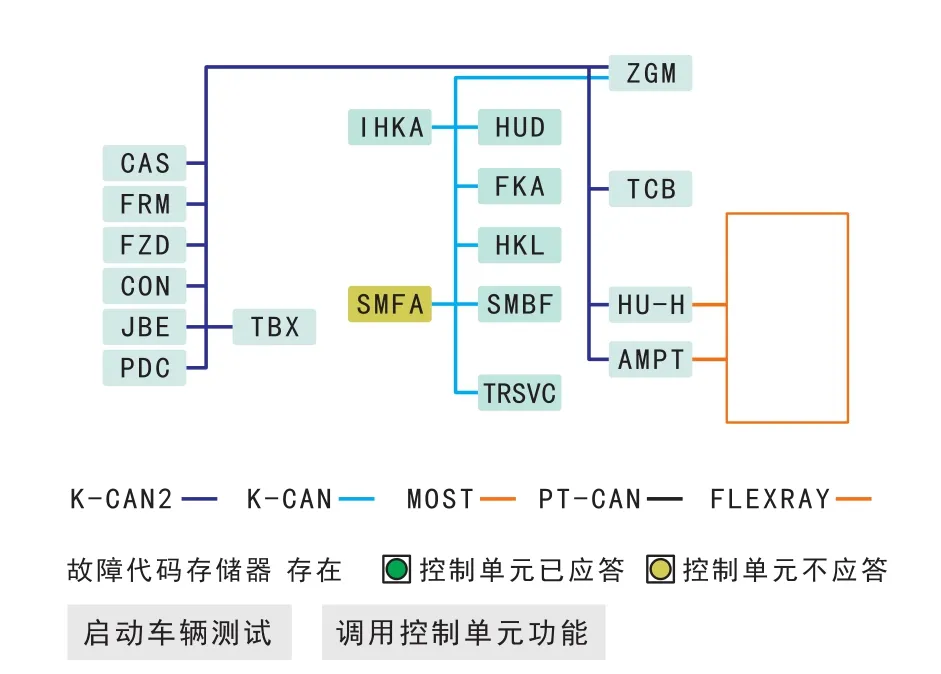
图13 K-CAN上某一控制单元不通信在车辆快测后控制单元树状态(截屏)

图14 K-CAN并联电路分支上某一控制单元不通信故障列表(截屏)
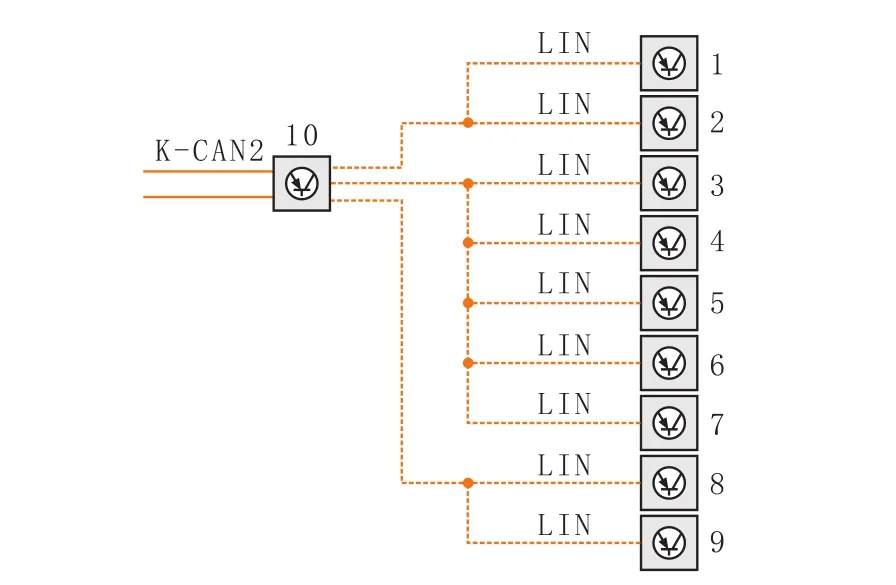
图15 脚部空间控制单元(FRM)LIN总线示例
当LIN总线相关组件上出现故障时,需要根据电路图执行相关元件的动作测试和状态查询。如果状态查询或元件动作测试成功执行,则LIN 总线上的通信无故障,在这种情况下无需在相关 LIN总线上执行其他故障查询。如果状态查询或元件动作测试不成功,针对相关组件和伺服机构需要根据电路图检查 LIN总线相关组件的供电和搭铁连接情况;当供电和搭铁均正常时,需要测量LIN总线波形(图16)。
针对LIN总线上的控制单元不通信且供电和搭铁均正常时,测量LIN总线波形,如图17所示,在 LIN 总线上识别到一个恒定的占优势地位的信号时,需进一步测量相关LIN 总线导线是否对正极和搭铁短路、是否断路及相关连接器连接是否接触不良。

图16 LIN总线正常波形(截屏)

图17 LIN总线故障波形(截屏)
(未完待续)
(2016-04-10)
猜你喜欢
北京航空航天大学学报(2022年7期)2022-08-06
汽车维护与修理(2021年17期)2021-03-10
计算机应用文摘·触控(2020年9期)2020-06-12
软件(2020年3期)2020-04-20
电子制作(2019年23期)2019-02-23
课外生活(小学1-3年级)(2018年9期)2018-10-16
汽车维护与修理(2018年1期)2018-04-04
金山(2017年9期)2017-09-23
汽车维护与修理(2017年7期)2017-02-06
环球时报(2009-05-31)2009-05-31