
《工业机器人现场编程》综合性项目教学法探究
2016-11-30 03:14凌双明彭小平
山西电子技术 2016年5期
凌双明,彭小平
(长沙航空职业技术学院,湖南 长沙 410124)
《工业机器人现场编程》综合性项目教学法探究
凌双明,彭小平
(长沙航空职业技术学院,湖南 长沙 410124)
主要探索和实践了通过将工业机器人在线编程与西门子1200 PLC、西门子TP700触摸屏通讯相结合,采用项目法的综合实训教学模式。综合性的项目教学方法可以使高职学生编程能力差、通讯调试能力差的问题得到较好解决,对高职学生的综合素质的培养有一定的借鉴意义。
西门子1200;项目法;TP700;在线编程
随着我国制造业的极速发展,目前正面临着人力成本提升和利润降低等问题,为了提高生产效率,很大一部分企业都将工业机器人应用于生产建设以达到提高工业生产自动化程度的目的,工业机器人在我国已成为企业无人化工厂必不可少的设备之一[1]。工业机器人现场编程是工业机器人技术专业的一门专业必修课,是一门多学科的综合性技术,涉及触摸屏技术、可编程控制器、传感器、变频器技术等多学科的内容[2]。其目的是培养学生在机器人技术方面分析与解决问题的能力,为毕业后从事专业工作打下必要的机器人技术基础。
采用工业机器人现场编程与PLC、HMI通讯实现码垛和搬运的综合性项目教学设计,可以让学生通过在教中做、做中学来真正理解和消化课程的重点和难点,达到融会贯通的教学效果。
1 PLC工业机器人通讯综合性教学项目的设计
1.1 教学项目开发的思路
本文主要研究通过在实训项目中制订典型工作任务,以项目为载体,工作过程为导向,以学生为主体,充分体现职业性、实践性和开放性的要求,选取了工业机器人通过交换机与西门子S7-1200 PLC、西门子TP700触摸屏通讯的综合性教学项目来实现对物品的拾取和定位放置,此项目考察学生的PLC编程、工业机器人编程、HMI画面绘制等综合技能。
1.2 本项目任务要求
人工手动放置装有一个物品的托盘于托盘流水线,当托盘经过托盘流水线时,阻挡气缸进行阻挡,然后相机进行识别,识别完成后,发送数据给PLC,PLC进行相应处理后,当托盘运行到抓取工位时,把数据发送给机器人,机器人根据传送过来的物品数据,用单吸盘对托盘物品抓取,并放置于流水线的指定位置。编写PLC程序并完成HMI绘制后完成机器人在线编程和示教(其中视觉脚本和托盘流水线程序已经提供)。

表1 主控地址通讯配置表
2 项目实施
通过前面实训项目的设计,使学生了解本项目的任务要求和PLC控制系统的硬件的设计和工业机器人的变量设定。为了让学生掌握实训项目的知识点和技能点,教师在教学过程中通过案例教学法、演示操作教学法来实现。完整的教学设计和基于工作过程的项目驱动教学的实施如下:
2.1 知识点、技能点的学习和训练
思考:
1) 如何新建工程,组态PLC IO模块 ,改PLC IP地址,新建子网。
2) 如何组态变频器,选择子网 ,改IP地址和变频器名称,给变频器添加子模块。
3) 如何组态触摸屏,改IP地址。
4) 如何向你添加子模块的控制地址写控制字。
5) 如何写程序控制变频器。
6) 如何绑定触摸屏变量,控制电机运动。
行动:试着完成以下任务。
任务一:进行触摸屏的组态画面绘制,并关联变量,设置触摸屏IP地址。
任务二:使用S7-1200PLC编写机器人抓取函数。
任务三:使用S7-1200PLC编写机器人偏移函数。
X为轴坐标输入,Y为Y轴坐标输入,Z为Z轴坐标输入,A是角度输入值,类型都是整数型。
XOffset、YOffset、ZOffset、AOffset分别表示XYZ轴和角度坐标偏移量的输入值,类型都是整数型。
2.2 确定系统控制方案
思考:本系统采用什么控制器?完成项目需要哪些设备和元器件?
行动:小组成员共同研讨,制订系统控制总体控制方案,绘制系统工作流程图及系统结构框图;据技术工艺指标确定系统的评价标准。
2.3 PLC控制系统硬件的设计
1) 收集相关PLC控制器、触摸屏、开关、按钮等设备资料,完善项目设备表(元器件清单)。
2) 输入/输出的点分配。
3) 绘制出触摸屏组态界面,如图1所示。
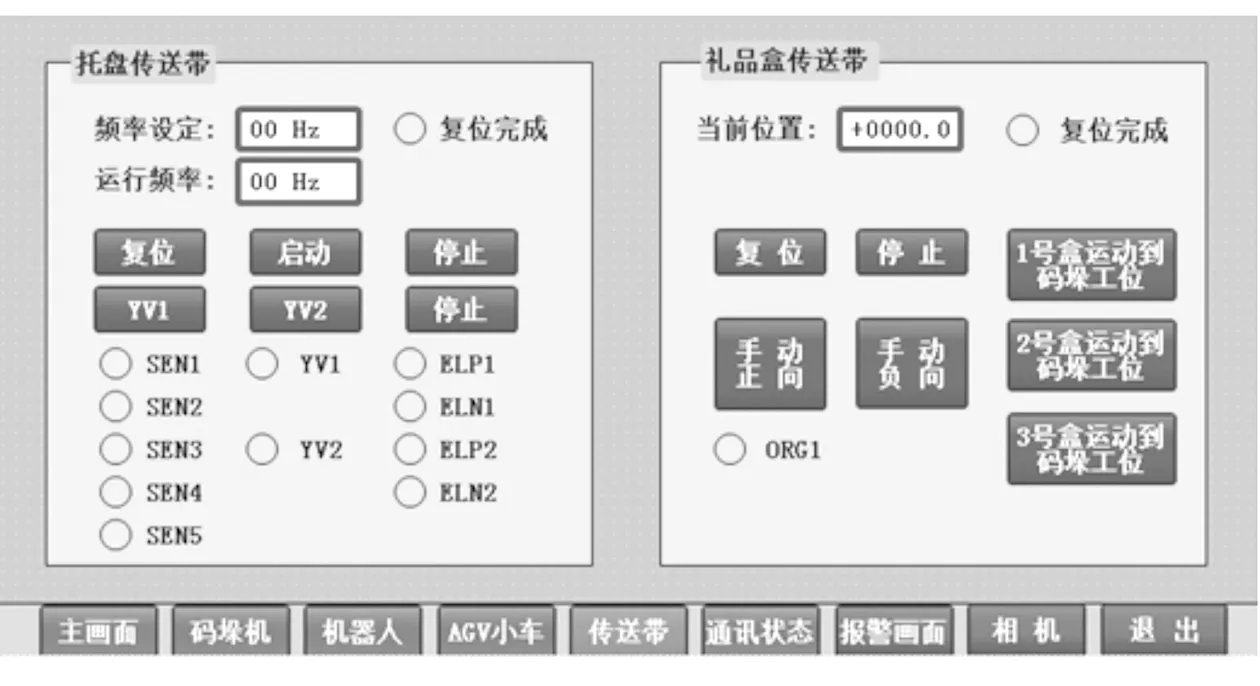
图1 HMI组态画面
2.4 PLC程序设计
1) 根据被控对象的工艺条件和控制要求,设计梯形图,要求两种以上方法进行PLC的程序设计。参考方法:第一种方法:通讯功能指令;第二种方法:调用封装好的函数块。
2) 机器人在线编程和示教。机器人回零流程:按下触摸屏上的“复位”按钮,发送31指令,机器人反馈100待机状态,再按下触摸屏上“启动”按钮,发送12和回零104指令,机器人回零完成反馈100待机;机器人运行流程:接收到机器人待机状态100,发送启动103、抓取和放置工件的X Y Z轴坐标和Z轴角度、使用的工具,机器人反馈回运行中200,运行完成后反馈回101。
发送暂停信号11,故障排除完成后按下触摸屏上“继续”按钮,发送203继续执行指令,机器人继续执行;或者是机器人重新回零开始。
2.5 系统安装接线和综合调试
首先按系统接线图连接好系统,然后根据控制要求对系统进行调试,直到符合要求。
1) PLC通电,通过编程软件将PLC置于非运行(RUN)状态,并将程序下载到PLC。
2) 通过编程软件将PLC置于运行RUN状态,按下触摸屏上的启动按钮,观察计算机上显示程序中各触点和线圈的状态和工业机器人的运行情况。
3) 联合调试、发现问题进行修改,直到系统完善。
2.6 项目考核及总结
教师根据联机调试结果,即机器人在自动模式下所能实现的功能,给出该项目的分数作为项目考核成绩[3],学生开展小组讨论总结实训中联机调试遇到的问题及解决方案。
3 结论
HMI和PLC控制机器人实现工件抓取、放置的综合性项目实训教学,可以使学生掌握HMI组态绘制与变量关联、西门子1200的通讯测试、机器人编程与调试等综合知识技能。丰富的教学内容和项目化教学方式让学生通过“做中学”,让教师“做中教”的方式,教学做一体化明显提高了教学效果。
[1] 叶晖,管小清.工业机器人实操与应用技巧[M].北京:机械工业出版社,2010.
[2] 叶晖.工业机器人典型应用案例精析[M].北京:机械工业出版社,2013.
[3] 陈永清.基于工学结合的证书课程实训项目设计探索[J].深圳信息职业技术学院学报,2011(4):54-56.
Research on Comprehensive Project Teaching Method of “Industrial Robot on Line Programming”
Ling Shuangming,Peng Xiaoping
(ChangshaAeronauticalVocationalandTechnicalCollege,Changsha,Hunan410124,China)
This paper mainly explores the integrated practice teaching mode of the project method by combining the industrial robot online programming with the SIEMENS 1200 PLC,SIEMENS TP700 touch screen communication.Comprehensive project teaching method can make a better solution for the problems of poor programming ability and poor communication ability of higher vocational college students,which can be used for reference to cultivate the comprehensive quality of higher vocational college students.
SIEMENS 1200; project method; TP700; on line programming
2016-05-24
凌双明(1983-),女,实验师,硕士,主要研究领域为机电一体化技术。
1674-4578(2016)05-0084-02
G642.4;TP242
A
猜你喜欢
河北农机(2020年10期)2020-12-14
装备制造技术(2019年12期)2019-12-25
电子制作(2018年19期)2018-11-14
电子制作(2018年12期)2018-08-01
知识就是力量(2018年7期)2018-07-11
制造技术与机床(2017年6期)2018-01-19
凿岩机械气动工具(2017年2期)2017-07-19
电子制作(2017年19期)2017-02-02
工业设计(2016年11期)2016-04-16
当代化工研究(2016年6期)2016-03-20
