浅析多旋翼无人机在水域环境监测中的应用
2016-11-28 20:49梁瑞彪
中小企业管理与科技·上旬刊 2016年11期
关键词:环境监测
梁瑞彪
摘 要:多旋翼无人机在军用和民用上均有广泛的应用前景,对地面的观测则是多旋翼无人机的一种最有前景的用途。本文针对在水域环境监测中实时监测困难问题,提出利用多旋翼无人机搭载水域污染智能监测系统对目标水域进行监测,监测数据通过无线电系统实时传回到地面端系统,可直观、全面地掌握地区水域环境的实时动态情况。
关键词:微型多旋翼;环境监测;飞行控制系统
中图分类号: TP79 文献标识码: A 文章编号: 1673-1069(2016)31-146-2
1 无人机的定义
无人驾驶航空器简称无人机,英文的缩写为UAV(Unmanned Aerial Vehicle)。无人机具有受气候的影响小,效率高反应速度快、能准确定位、准备工作简单、操作控制容易等特点。整个系统运行稳定,经济性能高,可以在小面积区域、兴趣地点悬停重点拍摄。
2 无人机的分类
①水平起降式:水平起降式机翼为固定式。优点:飞行速度快,可以进行高空飞行,动力效率比高,续航能力强。缺点:受空气流动影响较大,无法悬停在指定位置,对目标只能进行“盘旋观察”在复杂地形飞行时需要操作难度高,微型固定翼UAV限于效果的比例,身体容易跟随流线和角运动,进而影响其稳定性,难以获得连续稳定清晰的图像。对起飞和降落场地要求较高,要求起飞及着陆航线平整且无障碍物,且发射或降落时需要考虑风向、风速问题,限制较多。②垂直起降式: 垂直起降式机翼为旋翼式。优点:低空空气流动对其影响较小,可在空中悬停。可以在兴趣目标点进行“悬停凝视”观测,可以获得连续稳定清晰的图像,有利于小目标或局部区域的细致观测。具有垂直起降能力,可以在恶劣的场地进行起降,对气象条件要求低,具有较广的应用范围。缺点:机翼载荷比水平起降式高,动力效率比低,无法滑行,为减少自重,续航力低,控制系统复杂,容错率低,容易出现故障。
在多种类的无人机中,四旋翼无人机是目前研究最为广泛、用途最多的一种。四旋翼无人机由于能够垂直起降、自由悬停,适应不同的情况,在不同的环境下自由转向和调速。
3 无人机工作原理
3.1 系统概述
无人机飞行控制系统是无人机的核心,飞行控制系统通过采集飞行器的姿态、速度、压力、转速等信息,传输给飞行控制处理器,由处理器解算并发出控制无人机飞行状态的指令,并且通过无线数据通信系统可以向地面站实时传输无人机的飞行参数和功能传感器所探测的目标信息;另一方面,地面站也可以根据需求向无人机发送指令,控制无人机姿态、航向,到达指定地点进行拍摄或探测。整个飞行控制系统的设计是无人机的关键,是地面站与机上飞行控制系统的综合,飞行控制系统的好坏直接决定着无人机的质量。
3.2 无人机探测系统搭载原理
3.2.1 无人机遥感技术
无人机的遥感技术是将传感器技术、遥测遥控技术搭建在无人机技术的平台上,并运用计算机技术进行运算控制,通过通信技术完成信息传输及存储,可迅速、自动、智能地获取相关的环境空间信息,采集数据和应用处理。无人机续航时间长、能实时传输影像,具有成本低、高分辨率、机动灵活等特点,在高危地区探测具有较好的应用前景。
3.2.2 利用高分辨CCD相机系统获取遥感影像
无人机通过控制系统可以实现影像的自动拍摄和获取,通过航迹的规划实施监控,将采集的信息数据进行压缩和自动传输,还可以完成影像预处理,可以在水域环境监测提供环境信息,为各级环境部门环境检测提供便利,并可满足环境应急响应的需求。
3.2.3 数据融合生成三维立体空间图
地面站系统搭载了数据融合软件系统,该系统将传回的传感器数据和位置信息等数据,进行数据融合,生成立体三维空间图,直观展示各类信息,便于数据分析。
3.3 微型多旋翼无人机系统使用目标设定及定位
卫星及传统航空器在复杂水域、面积相对小且污染类型多样的区域拍摄不清晰,无法达到分析要求,无人机飞行器可以在复杂区域完成悬停凝视,拍摄连续稳定高像素图像,更能细致对进行目标区域进行监测。
四旋翼无人机携行方便,不受使用场地约束,最高可在6 级风力情况下使用,在阴云、雾霾能见度不良天气情况下,可以低空或贴水面飞行,获取水域环境的高清晰图像,可以实时追踪和监测突发环境事件的发展。同时借助地面站外部通信设备将无人机实时拍摄巡查地点的高清图片通过网络进行转播或存储。
3.4 无人机的优点
①多旋翼无人机通过采用GPS 模块实现了空间定位功能;将网络通信、自动控制、物联网及软件技术,集成在多旋翼无人机上,利用无人机灵活性特点,以点及面,就可以无死角、全方位地探测目标区域环境条件状况,实现定时定点采样,极大减小了控制生产成本和系统功耗。②数据融合生成立体三维空间图;特有设计了地面站系统,实时显示无人机传回的传感器数据和飞机当前位置信息等,同时进行数据融合,直接将数据以立体三维空间图直观展示,环境各参数指标一目了然。
4 微型多旋翼无人机的操作注意事项
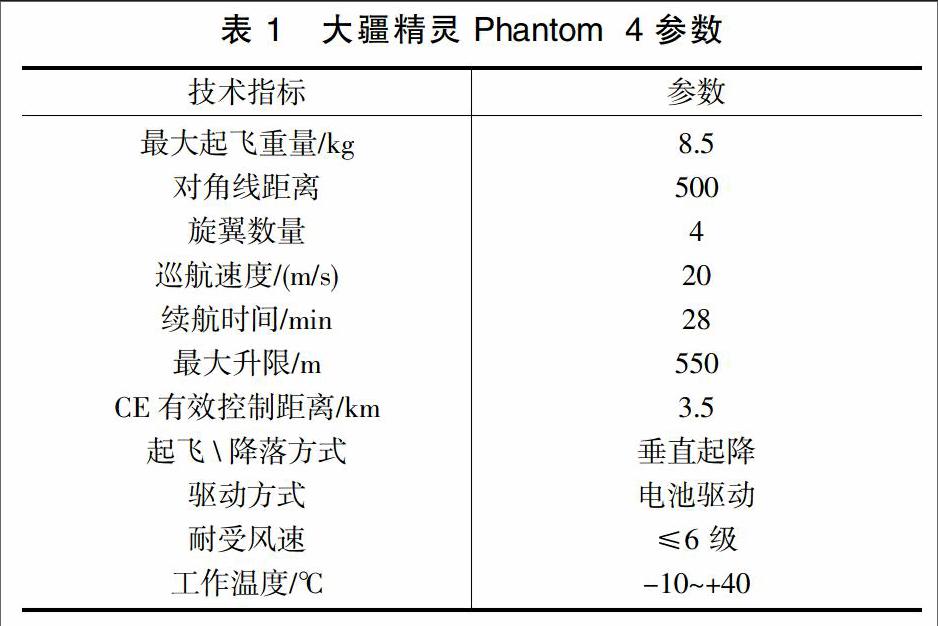
本文以大疆精灵Phantom 4为例,介绍无人机的使用方法:无人机具体参数如表1。
①在目标地点附近起飞,飞行范围是以起飞点为中心高度120m以下,半径500m 范围内。②四旋翼飞行器可以垂直起降,在目标区域附近垂直起飞,到达预定高度后,飞往目标地点,对目标地进行检测。在检测过程中可以根据现场环境调整无人机的高度,便于获得更清晰的图像。在飞行过程中要注意于其他建筑或固定障碍物保持20-30m的安全距离,与运动的障碍物需要保持500m的安全距离。在一次出动微型多旋翼无人机时,需要在各组间设立指挥员,协调各组的飞行范围,保证任务顺利。③受电池约束,该型号无人机只能持续飞行28分钟,信号接收范围为3.5公里,在飞行时注意飞行时间和距离的控制,避免因没电或超出控制距离造成损失。
5 多旋翼无人机在水域环境监测中实际的应用
5.1 无人机在水产养殖区的应用
在水产养殖区域,水域环境检测尤为重要,以水草为例,水草作为大多鱼类的食物,可以很好地促进鱼类的生长,当水草超过一定数量,会造成水层缺氧,并加速水草死亡,造成水质变坏,不利于鱼类养殖。所以鱼塘需要实时监视水草数量,人工划船或观望难以做到全局观测,结果比较片面,使用无人机对水域进行全局探测,快速了解鱼塘整体情况,也可以在局部进行悬停并凝视,确定水草生长情况,获得鱼塘准确信息并及时制定应对措施。
5.2 无人机在环境检测的应用
沂河流经临沂沂水、沂南、临沂市区,临沂段全长284公里,流域面积7425平方公里,集水面积2872平方公里,河面最宽达1540米;被临沂人民誉为"母亲河"。是临沂重要的淡水资源,该河两岸附近分布着工场和众多的居民地,存在排污问题。对沂河的环境检测尤为重要,通过无人机技术可以快速地获得沂河流域环境情况,对保护水资源具有重大意义。
6 结论
水域环境监测需要对目标区域进行全局观测和量大的局部观测,要想获得大量高质量的局部观测信息,就需操作灵活,可控制性高的无人机系统组来完成。可以预见的是微型多旋翼无人机将会得到大量应用,而且未来微型多旋翼无人机的发展方向将是智能化、多样化的空中机器人群组。
参 考 文 献
[1] 高鹏骐,晏磊,赵红颖,何定洲.无人机遥感控制平台的设计与实现[A].第十五届全国遥感技术学术交流会论文摘要集[C].2013.
[2] 黄爱凤,邓克绪.民用无人机发展现状及关键技术[A].第九届长三角科技论坛——航空航天科技创新与长三角经济转型发展分论坛论文集[C].2012.
[3] 丁霖.无人机系统人机交互界面浅析[A].探索 创新 交流(第4集)——第四届中国航空学会青年科技论坛文集[C].2010.
[4] 曹攀峰.敌对与非敌对环境下无人机群的协同搜索路径与策略研究[D].复旦大学,2010.
猜你喜欢
中国应急管理科学(2022年2期)2022-05-23
农业灾害研究(2022年1期)2022-05-07
装备维修技术(2021年32期)2021-11-19
科学家(2021年24期)2021-04-25
西部论丛(2020年1期)2020-10-13
农民致富之友(2020年21期)2020-07-18
农民致富之友(2018年9期)2018-06-27
中国经济周刊(2017年39期)2017-10-20
中国高新技术企业(2017年8期)2017-06-05
中国高新技术企业(2017年6期)2017-05-17